[22.08] BEiT v2

藏在高維度的密碼
BEiT v2: Masked Image Modeling with Vector-Quantized Visual Tokenizers
還記得 BEiT 嗎?
如果忘記了,我們趕快複習一下,不然這篇論文沒辦法看了:
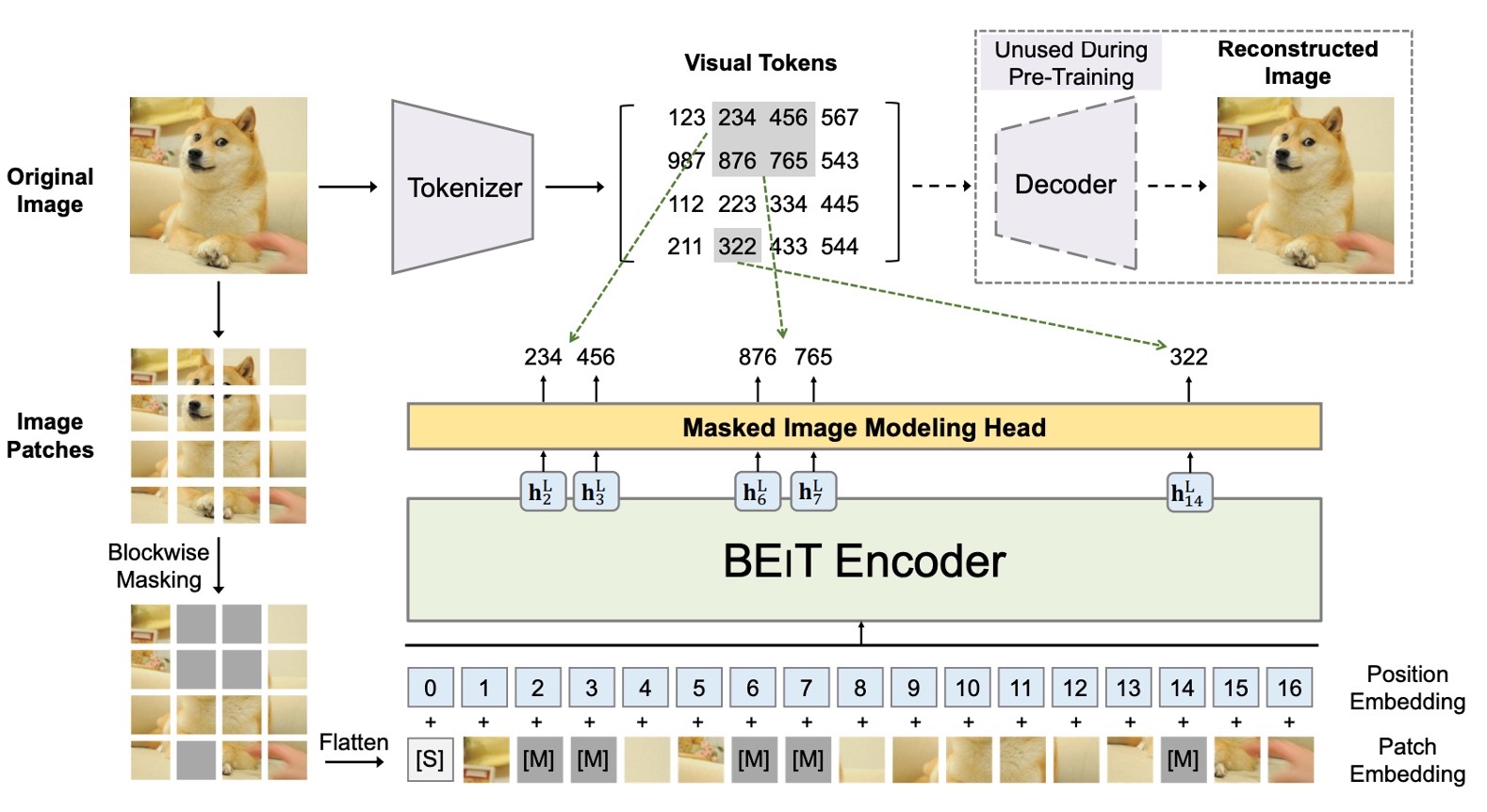
BEiT 的核心概念是把影像轉成一組離散的視覺特徵(共有 8192 個),在這裡同時存在兩個架構,如上圖所示。
第一個架構是類似 VAE 的結構,在圖中的上半部,這部分是前人研究的結果,不參與訓練,只是用來將圖像轉換成一組離散的視覺特徵。整體概念比較像是訓練一個「圖像字典」,分別對應了圖像不同的抽象概念。
第二個架構就是下半部,也就是真正參與梯度更新的模型,這裡引入了 BERT 的 MLM 機制,對影像區塊進行遮罩重建,也因為是遮蓋影像區塊,所以又稱為 Masked Image Modeling(MIM)。
如果你對 BEiT 的細節感興趣,可以參考我們之前的筆記:
定義問題
說到 MIM,在最近這幾年最有名的大概就是 MAE 了。
MAE 認為影像資訊存在大量的冗餘,因此只有遮蔽一點區域是無法讓模型學到有用的資訊的。在 MAE 的方法中,採用遮蔽 50% ~ 75% 像素的圖像重建策略,以提升模型學習的難度。
實驗結果確實很好,蔚為風潮。
如果你想多了解一點 MAE,可以看這篇:
但是 MAE 說到底也只是專注於「低層次」的像素重建,忽略了「高層次」的語義信息,導致表徵學習的語義能力不足。
那什麼是「高層次」的語義信息呢?
作者認為 BEiT 所提出的視覺單元(visual token)就是一個脫離像素的「更高層次」的抽象概念,所以基於 BEiT 的成果,這次就想點辦法來讓模型學習到更豐富的語意訊息。
解決問題
模型架構
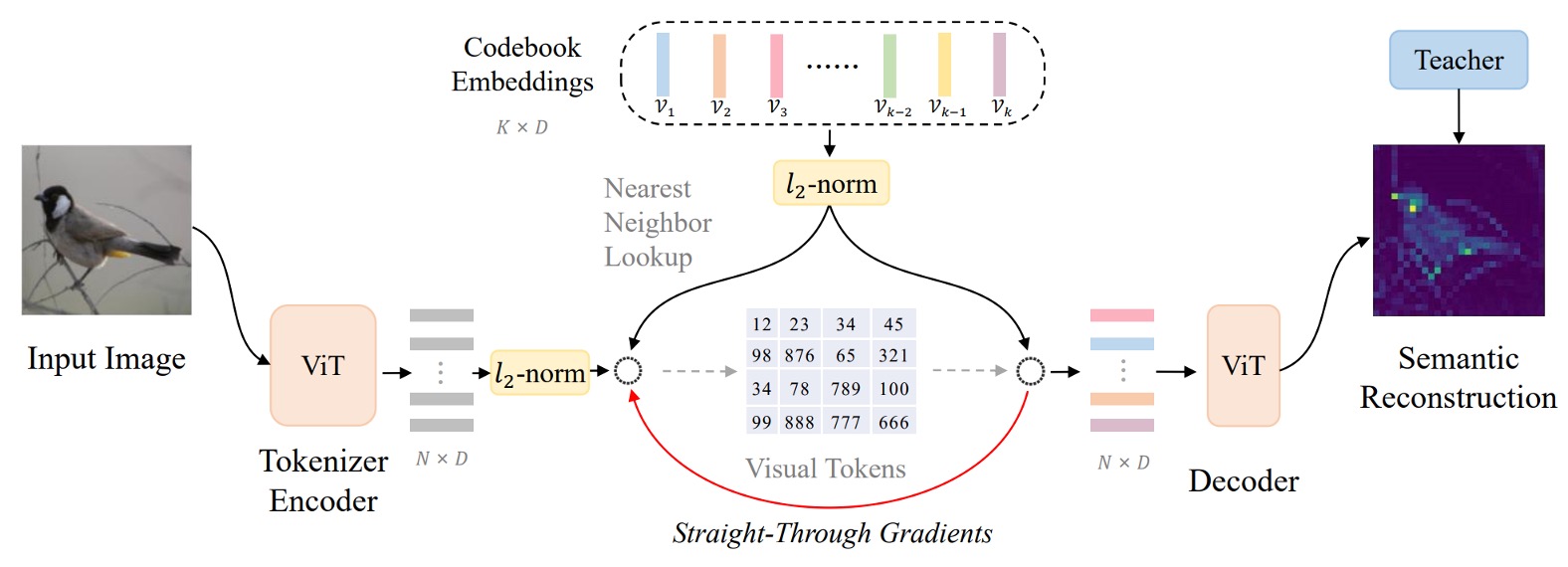
這個架構作者稱為:向量量化知識蒸餾(Vector-Quantized Knowledge Distillation),簡稱 VQ-KD。
突然間噴出一堆名詞,讓人措手不及,我們跟著上圖一步一步來看看。
-
步驟 1:計算影像特徵
首先,將輸入影像 分割為 個影像區塊(patch)。
假設影像為 ,且每個 patch 大小為 ,則有 個 patch,即 。每個 patch 攤平後透過 ViT 編碼器得到向量表示 ,其中 。
因此,我們有一組向量 ,每個 對應一個影像區塊。
到這裡,和 BEiT 的第一代沒有太大區別。
-
步驟 2:拿特徵去查詢代碼表
從這裡開始不一樣,在第一代 BEiT 中,作者直接採用 DALL-E 產出的視覺單元。
第二代的架構則是直接設定一個代碼表(codebook) ,其中包含 個代碼向量 ,每個 是 維向量。
要將 對應到一個代碼 ,作者使用下式尋找最相似的代碼索引 :
L2 正規化意思是把向量 投影到單位球面上,找出和 最相似的代碼 ,這個方式可以比較向量的方向而不是長度。
這個步驟就是「向量量化」的過程,將連續的特徵向量轉換為離散的代碼。
-
步驟 3:對齊教師模型,進行知識蒸餾
選定代碼 後,將其 L2 正規化的向量 輸入至一個 decoder(也是 Transformer 架構)。
decoder 的輸出為 ,希望透過對齊「教師模型」(例如 CLIP)給定的語意特徵 來學習高階語意。
訓練時,我們希望最大化 與 的 cosine 相似度,以此引導 decoder 產生有語意品質的表示。
這個步驟就是「知識蒸餾」的過程,讓模型學習到更豐富的語意資訊。
簡單來說,decoder 接收代碼向量後,輸出 ,並嘗試讓 愈大愈好(表示 與 越相似)。
在量化過程(arg min 選取代碼)中,無法直接對 微分。作者透過下述方法解決:
- 利用 stop-gradient(記為 )操作,停止梯度在特定路徑傳遞。
- 將 decoder 的輸入梯度「直通」(straight-through)回傳給 encoder,使得 encoder 和 codebook 都能更新。
VQ-KD 的整體訓練目標為:
這個目標函數包含三個部分:
- :最大化 decoder 輸出與教師特徵的相似度,使代碼具有高語意資訊。
- :讓 codebook 中選出的代碼 靠近 encoder 輸出 (但 不回傳梯度給 )。
- :讓 encoder 的輸出 靠近選出的代碼 (代碼不接收來自該項的梯度)。
藉由 stop-gradient,分別引導 encoder 和 codebook 往互相接近的方向調整,最終達到一個語意分佈良好的 codebook。
在訓練中,一個常見問題是 codebook 中只有少量代碼被頻繁使用,其他代碼則「閒置」。
為解決此問題,作者採用以下策略:
- 使用 L2 正規化計算距離,有助於平衡各代碼的使用率。
- 將 codebook 向量維度降低至 32 維,再映射回高維度空間,有助減少某些代碼被過度集中使用的問題。
- 使用指數移動平均(Exponential Moving Average, EMA)來更新代碼,使更新更平穩、多樣。
透過上述步驟與技巧,VQ-KD 讓視覺分詞器學會使用一組離散代碼來表示影像,在保留影像語意資訊的同時,實現了從連續特徵到高語意離散表徵的轉換。
預訓練方法
完成 VQ-KD 後,表示視覺分詞器已經學會使用離散代碼來表示影像,接下來就是要利用這些代碼進行 MIM 預訓練。
將輸入影像 的約 40% patch 隨機遮蔽(masked)。遮蔽後,對被遮蔽位置 使用相同的可學習嵌入向量 取代原本的 patch 嵌入 。
在上圖中,藍色的部分其實就是第一代 BEiT 的 MIM 預訓練過程,連遮罩的比例都是一樣的。預測時使用一個簡單的全連接層(MIM head)預測視覺代碼,其中視覺代碼 由前面訓練好的視覺分詞器提供,即 是原圖中對應 patch 的離散代碼。
MIM 的訓練損失為:
此處 為預訓練使用的影像資料集。
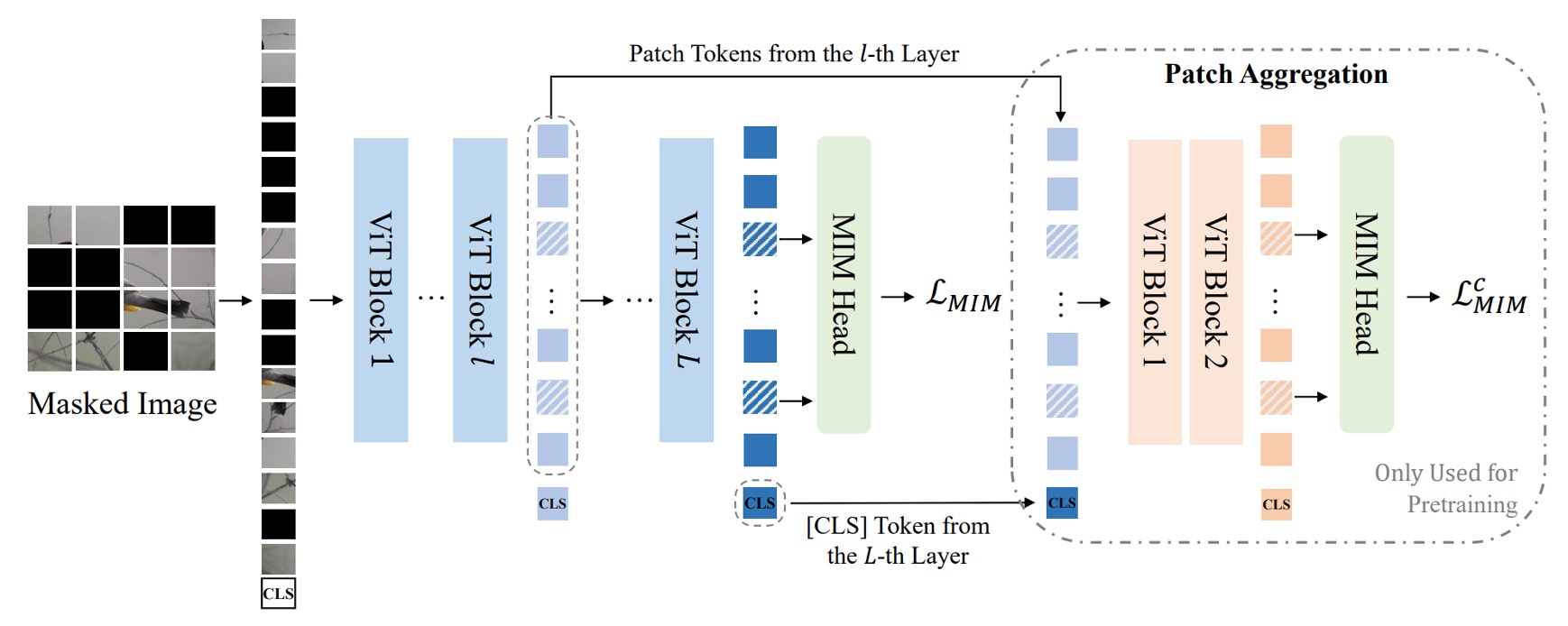
全域表徵預訓練
原文是 Global Representation Pretraining。
上圖中,Path Aggregation 的部分是這次 BEiT v2 的新設計。
為了能夠讓監督資訊可以深入到全域的視覺分詞器中,作者提出了一個新的設計,稱為「全域表徵預訓練」。
方法是在視覺分詞器的最後一層加入一個 Transformer 解碼器,將 [CLS] 與中間某層的 patch 特徵拼接,再輸入一個淺層 Transformer 解碼器,對被遮蔽的 patch 進行預測。
這裡的 decoder 與原本的 MIM head 參數共享,損失計算方式如同上式的 MIM 損失,記為 ,因此最終的預訓練損失為原本 MIM loss 與此淺層 decoder MIM loss 的和:
訓練完成後,該淺層 decoder 將被丟棄,只保留已具全域特徵能力的 [CLS] token。
模型配置
-
視覺分詞器 (Visual Tokenizer)
為了進行 BEIT V2 的 base- (B) 與 large- (L) 規模預訓練,視覺分詞器的架構採用 ViT-B/16。decoder 採用三層的 Transformer,與 tokenizer encoder 有相同維度與注意力頭數。
教師模型為 OpenAI CLIP-B/16,並在 ImageNet-1K(解析度為 224×224)上訓練 VQ-KD。無論後續是預訓練 base-size 或 large-size 模型,都使用同一個 base-size 的教師來訓練分詞器。
Codebook 大小 ,代碼維度 。
提示其他細節可以翻閱論文附錄 D。
-
Masked Image Modeling 設定
與 BEiT 相同,作者在無標註的 ImageNet-1K 上進行自我監督式預訓練,輸入影像解析度為 。
模型採用 ViT-B/16 與 ViT-L/16 為骨幹架構 ( patch)。在 patch aggregation 策略中,對 ViT-B/16 設置 ,對 ViT-L/16 設置 ,並以 2 層深度為預設值。遮蔽比例為 40%(約 75 個 patch),遮蔽策略為 block-wise masking。
提示其他細節可以翻閱論文附錄 E。
討論
與其他方法的比較
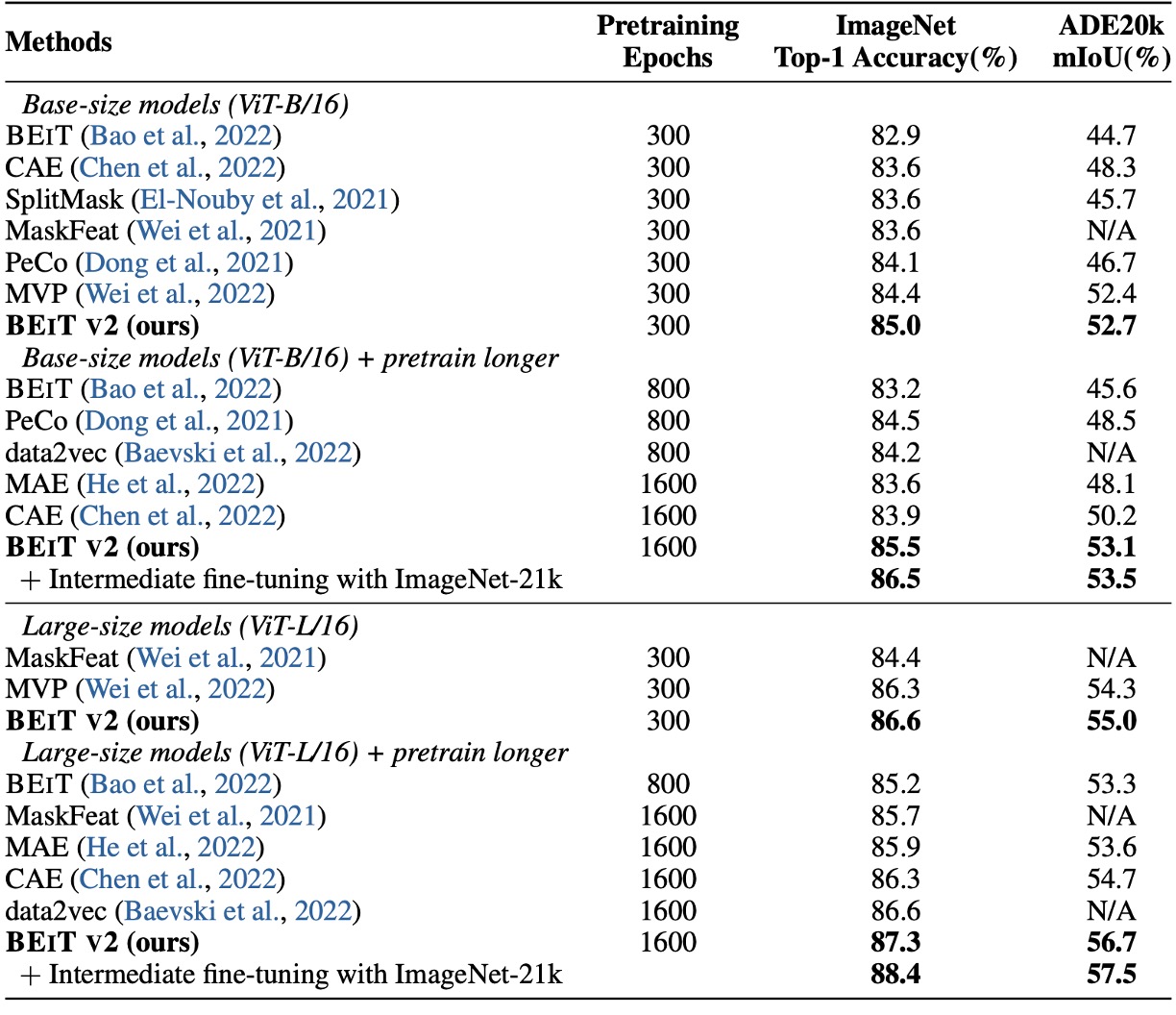
首先是 fine-tuning 的結果,作者將 BEiT v2 與 BEiT、CAE、SplitMask、PeCo、MVP 進行比較,結果顯示 BEiT v2 在 ImageNet-1K 上的 top-1 精度遠高於其他方法。
如果增加預訓練週期,BEiT v2 的 top-1 精度可以進一步提升,達到 85.5%,這是自監督方法的新紀錄。對於 ViT-L/16,300 epochs 時達到 86.6%,並且更長的預訓練可提升至 87.3%。
上表中最後一個欄位是作者在 ADE20K (Zhou et al., 2019) 資料集上進行實驗,該資料集含有 25K 張影像與 150 個語意類別。使用 UperNet (Xiao et al., 2018) 作為任務層,並在 的輸入解析度下微調 160K iterations。
結果顯示,BEIT V2 在 ADE20K 上顯著超越先前自我監督方法,以 ViT-L/16 模型為例,可達到 mIoU 為 56.7,創下 MIM 方法的新紀錄。
消融實驗-codebook 大小
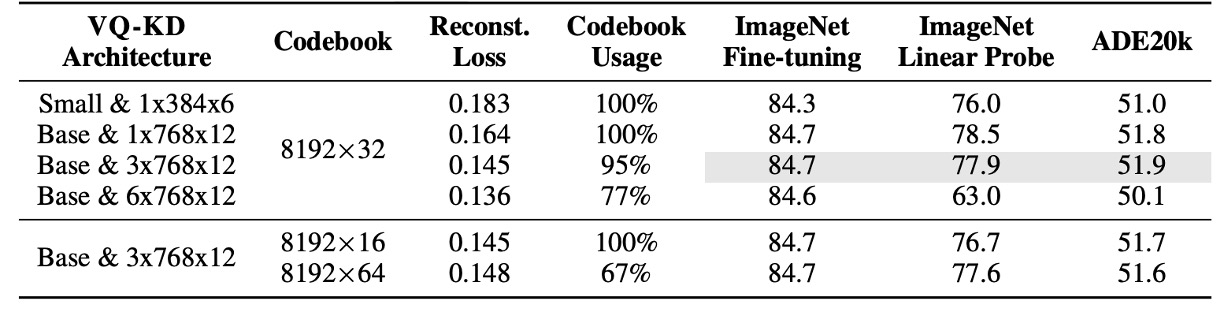
上表呈現 VQ-KD 在不同架構與 codebook 大小下的影響。
實驗以不含 patch aggregation 的 ViT-B/16(預訓練 300 epochs)為基準。
結果顯示:
- 較深的 decoder 雖然重建效果更好,但 codebook 使用率降低,下游任務表現也較差。
- 降低 codebook 查找時的維度有助提升 codebook 的利用率。
消融實驗-patch aggregation 策略
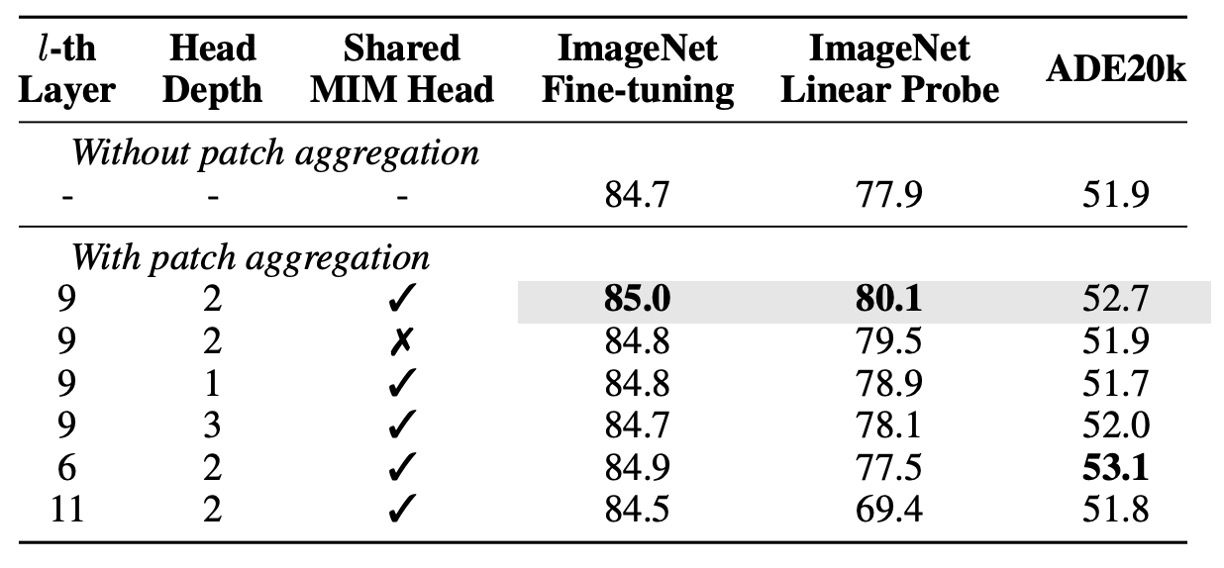
接著作者對 patch aggregation 策略的消融實驗,結果顯示:
- 使用較淺的 head(1 或 2 層)比使用較深的 head(3 層)表現更佳,表示淺層 head 更傾向於利用輸入的 [CLS] token。
- 有應用此策略的模型,表現優於無此策略的基準模型,特別在 linear probing 有較大提升,顯示其增強了影像層級表徵。
- 在此策略下共用 MIM head 有助於提升下游任務表現。
消融實驗-教師目標分析
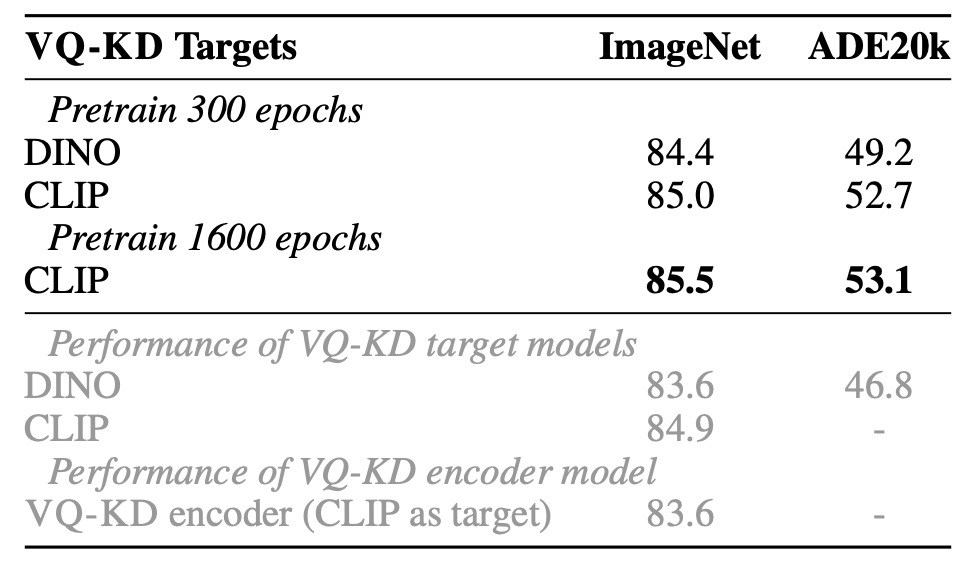
作者比較在 DINO 與 CLIP 教師下訓練的 VQ-KD 效果:
- DINO 作為教師時,BEIT V2 在 ImageNet 上達 84.4%,ADE20K 上達 49.2%,皆遠優於原 DINO 模型。
- CLIP 作為教師時,BEIT V2 同樣持續提升,顯示 VQ-KD 的可擴展性。
上表中的灰字,代表的是直接在 ImageNet 上微調 VQ-KD encoder,可以發現其遷移能力不及教師模型。然而,在加入 MIM 預訓練後,模型可超越教師和 tokenizer encoder,證實此自我監督學習方法的優勢。
Codebook 視覺化
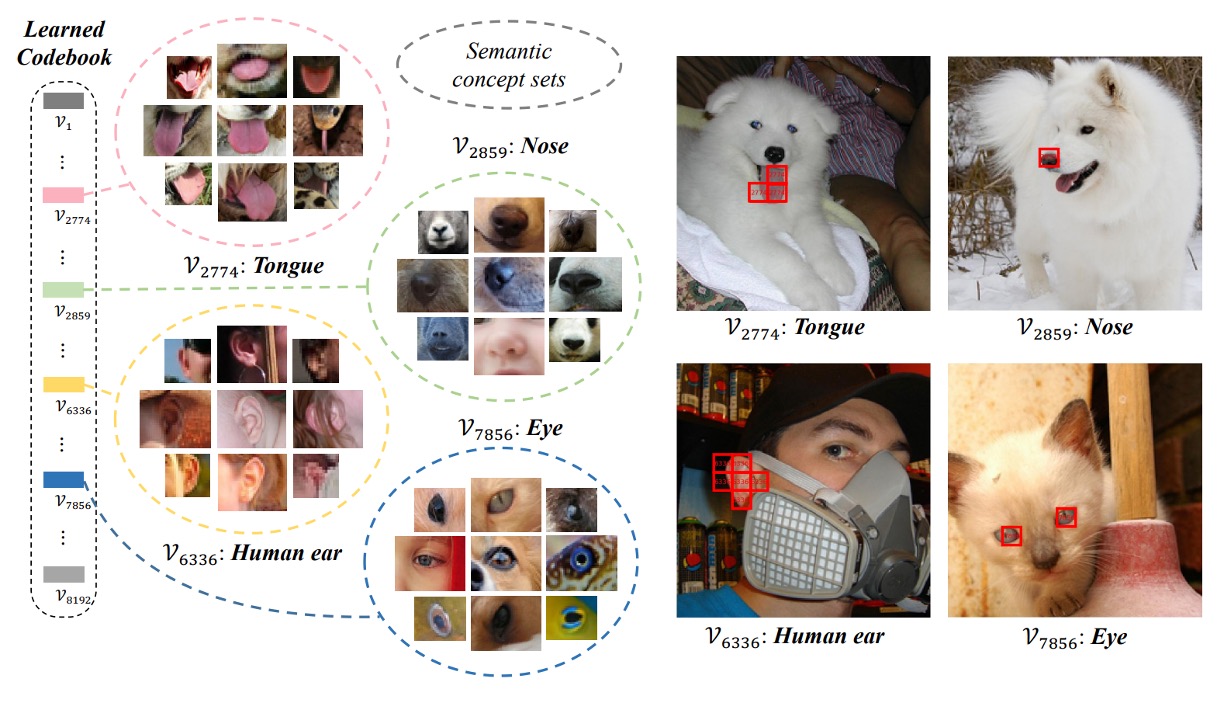
最後,我們看一下 codebook 的視覺化結果。
作者使用 VQ-KD 計算 ImageNet-1k 驗證集的離散代碼,將擁有相同代碼的影像 patch 群集在一起。可以看到同一個代碼下的 patch 具有相似的語意特徵,例如代碼 7856 對應的 patch 都與「眼睛」相關,包括人、貓、狗、魚、蛇的眼睛。
結論
Codebook 是個非常吸引人的概念。
從目前的研究趨勢來看,Codebook 不僅可用於影像分詞,協助訓練更高品質的視覺分詞器與 MIM 預訓練,也被視為橋接多模態領域的有力方法之一。另外,以離散代碼作為中介,模型可直接從大量未標註的資料中萃取語意特徵,降低對大規模人工標註的依賴,那些缺乏標註資料的領域或許可以透過 Codebook 的方法來進行自我監督式學習。
整體而言,本文透過 VQ-KD 改善了 BEiT 的預訓練流程,成功將 MIM 推向更高階的語意理解範疇。同時,作者提出的 patch aggregation 機制讓模型更能聚合全域資訊,縮短預訓練目標與下游應用之間的差距。
下一步,就是要帶著「離散編碼」的概念進軍多模態領域了,請看 BEiT-3。