[18.04] YOLOv3

引入多尺度檢測
YOLOv3: An Incremental Improvement
第三代的 YOLO 其實不是論文,就作者本人表示:這只是一份技術報告。
定義問題
近期在目標檢測領域有許多新的研究進展。
作者想著是時候將這些新的想法整合到 YOLO 中,並且進行一些改進。
其中,Bounding Box 預測的部分沒有更改,直接沿用 YOLOv2 的設計,這邊我們就不再贅述。
解決問題
作者做了一系列的改進。
更新 Backbone
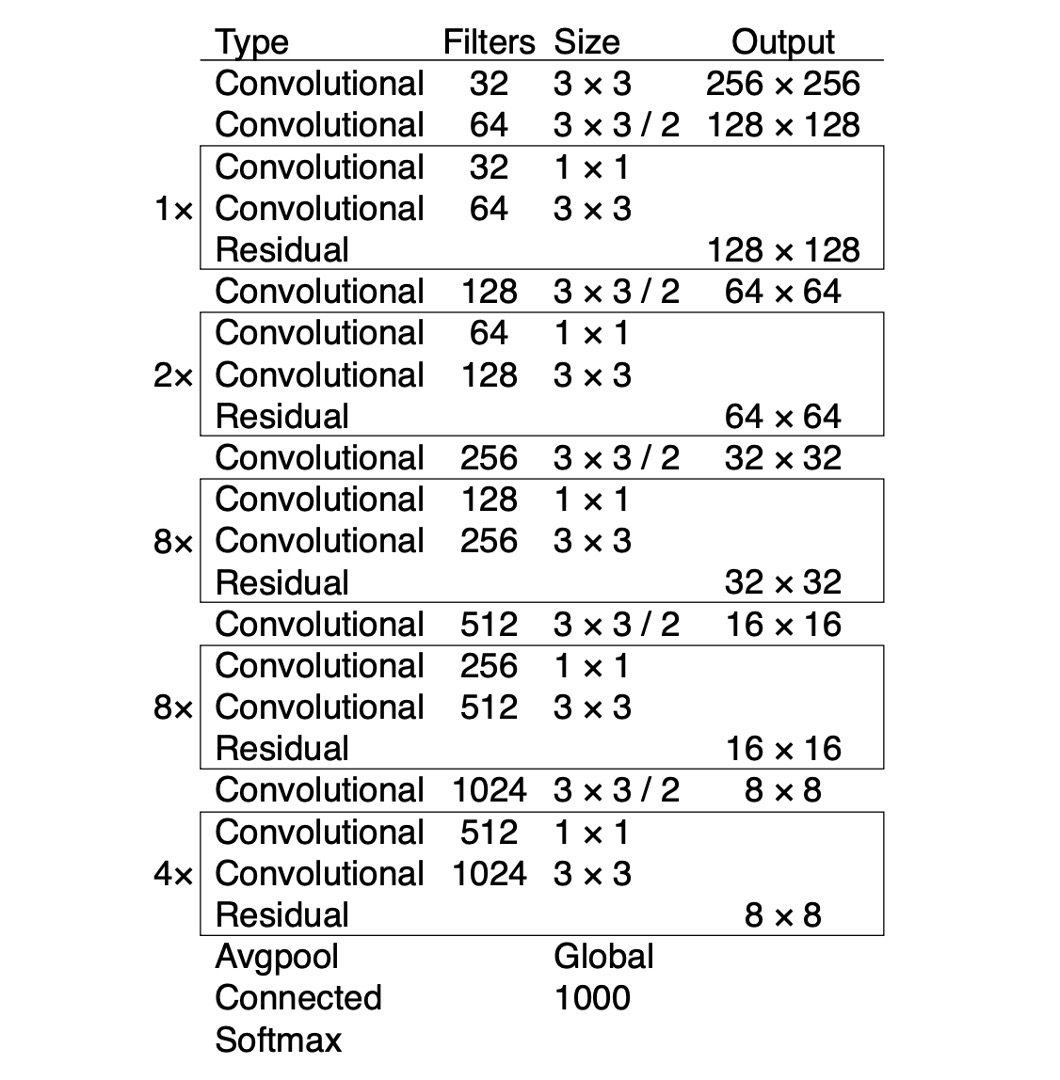
作者將 Darknet-19 的網路架構改為 Darknet-53。這裡同樣使用連續的 3x3 和 1x1 的卷積層,並且新增一些殘差連接。這是一個更深的網路,並且在 ImageNet 上進行了訓練,因為這個網路有 53 個卷積層,所以作者稱之為 Darknet-53。
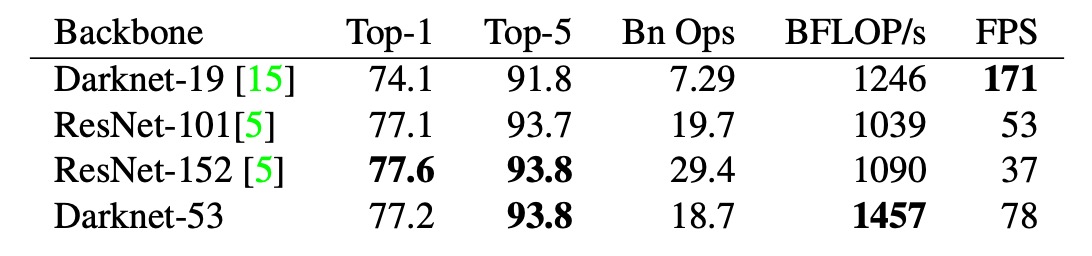
下表為 Darknet-53 的在 ImageNet 上的表現,可以看到 top-1 準確率和 ResNet-101 持平,約為 77.1%,但是推論速度提升 50%。
類別預測
這裡不用 softmax 來預測類別,而是使用 logistic regression 來預測每個類別的機率。
意思就是讓模型不需要在類別上做出硬性的決定,而是允許模型在多個類別上都有機會,透過這種方式讓模型更容易拓展到未知的類別。
多尺度檢測
參考 FPN 和 RetinaNet 的概念,作者在 YOLOv3 中引入了多尺度檢測。
錨點的部分仍然使用 K-means 聚類的方式找到最佳的錨點,不一樣的地方是使用三個不同尺度的特徵圖,分別是 1/32, 1/16, 1/8。在每個尺度上都預測三個不同大小的框,所以整個算起來有: 4 個邊界框偏移、1 個物件信心分數、80 個類別機率。
其預測張量尺寸為 。
討論
在 COCO 上的表現
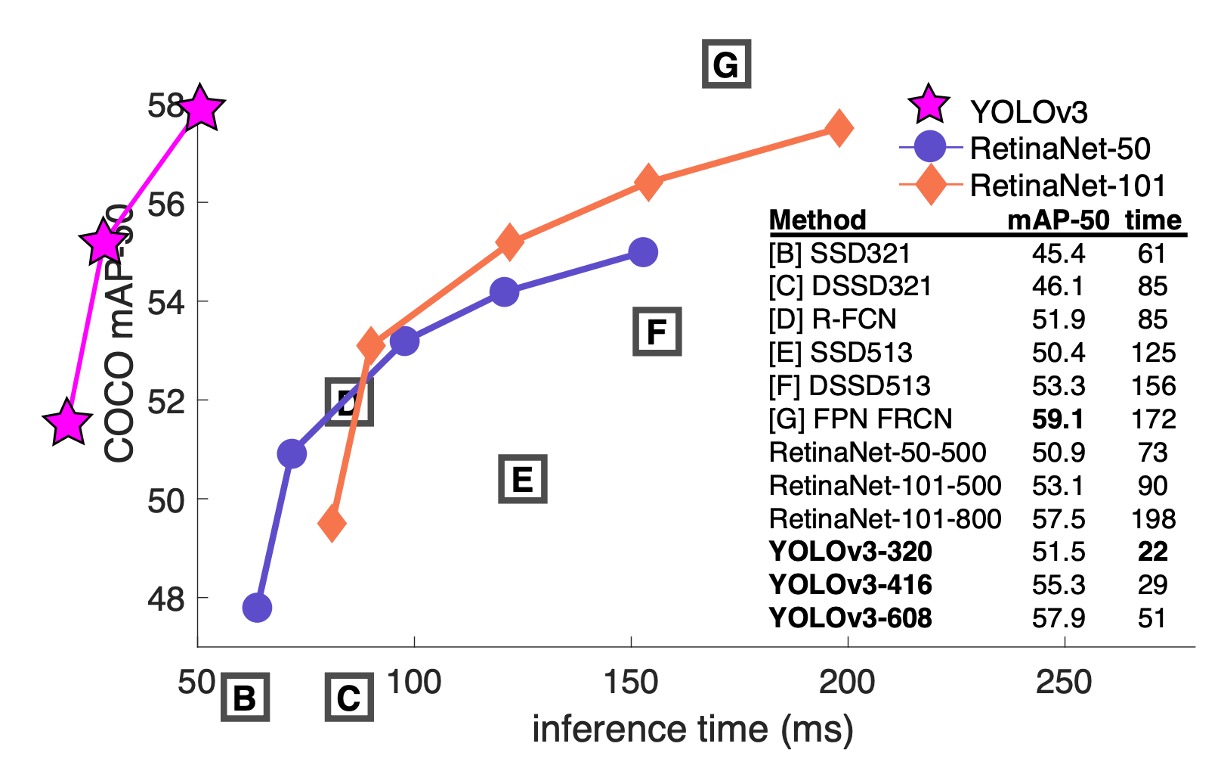
作者首先承認由於不想花費大量時間重新訓練其他架構的模型,於是從 RetinaNet 論文中「借來」了一份圖片和一份表格資料。然後把 YOLOv3 的結果放在這份表格上,可以看到 YOLOv3 在速度和準確率上都有不錯的表現。
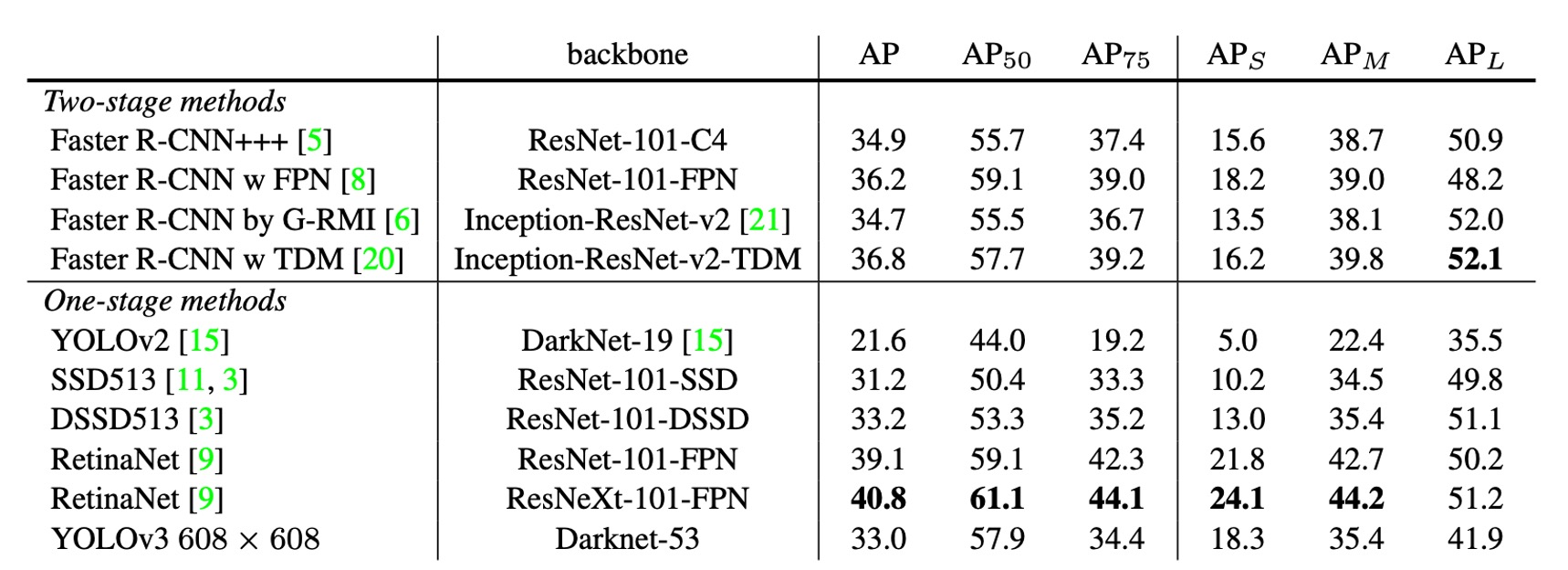
從上表中可以看到,YOLOv3 在 上的表現很優秀,遠高於 SSD 架構,這表明物體的檢測上有很好的表現。但隨著 IOU 的閾值增加,YOLOv3 的表現逐漸下降,這表明 YOLOv3 難以產生高精度的邊界框。
在過去 YOLO 架構對於小物體的檢測表現不佳,但是 YOLOv3 在這方面產生反轉。通過新的多尺度檢測,YOLOv3 在小物體的檢測上有了很大的提升,但是在中大尺度物體的檢測上表現下降。
做了卻沒效果的嘗試
作者在訓練過程中嘗試了一些方法,但是效果不明顯,在文章中作者也一併提出。
- 錨框中心點 x, y 偏移預測:作者嘗試改成使用線性啟動函數,但是效果不明顯。
- 線性 x, y 預測,而不是 logistic:作者嘗試使用線性啟動函數取代 logistic,但是性能下降。
- 使用 Focal Loss:作者嘗試使用 Focal Loss 來解決類別不平衡的問題,但是性能下降 2 個百分點,作者表示自己也不知道原因。
- 雙 IOU 閾值:作者嘗試使用使用 Faster R-CNN 的方式,將物件以 IOU 大於 0.7 視為正樣本,小於 0.3 視為負樣本,忽略中間的部分,但是效果不好。
結論
根據過去的研究結果,人類很難用肉眼區分 IOU 0.3 和 0.5 的檢測框,所以作者認為既然人類都難以區分,那模型在這些驗證資料集上追求更高的分數,似乎也沒有太大的意義。
YOLO v3 的性能在作者看來已經足夠應對現實中大部分的問題,我們應該專注於提升模型的安全性,讓這些高性能的模型用在正確的地方,減少對世界的危害才是更重要的事情。
這篇研究報告確實寫得非常率性,如果你好奇作者原始說法,可以去看看原文。