[21.01] Fast DETR

摻點高斯吧!
Fast Convergence of DETR with Spatially Modulated Co-Attention
我們繼續 DETR 的討論。
DETR 做的事情,相信讀者都已經很熟悉了。
定義問題
作者看完 DETR 之後,發出了跟前面作品 Deformable DETR 一樣的嘆息:
- DETR 的收斂速度太慢了。
而問題的根源在於 DETR 的跨注意力機制並不考慮預測的邊界框,因此需要多次迭代才能為每個物件查詢生成適當的注意力圖。
基於這個思路,或許只要我們改進跨注意力機制,就能提高 DETR 的收斂速度。
在 Deformable DETR 中,作者改掉了最底層的注意力運作方式。
而這篇論文則是在跨注意力機制上加入了一些先驗知識。
解決問題
空間調製共注意力
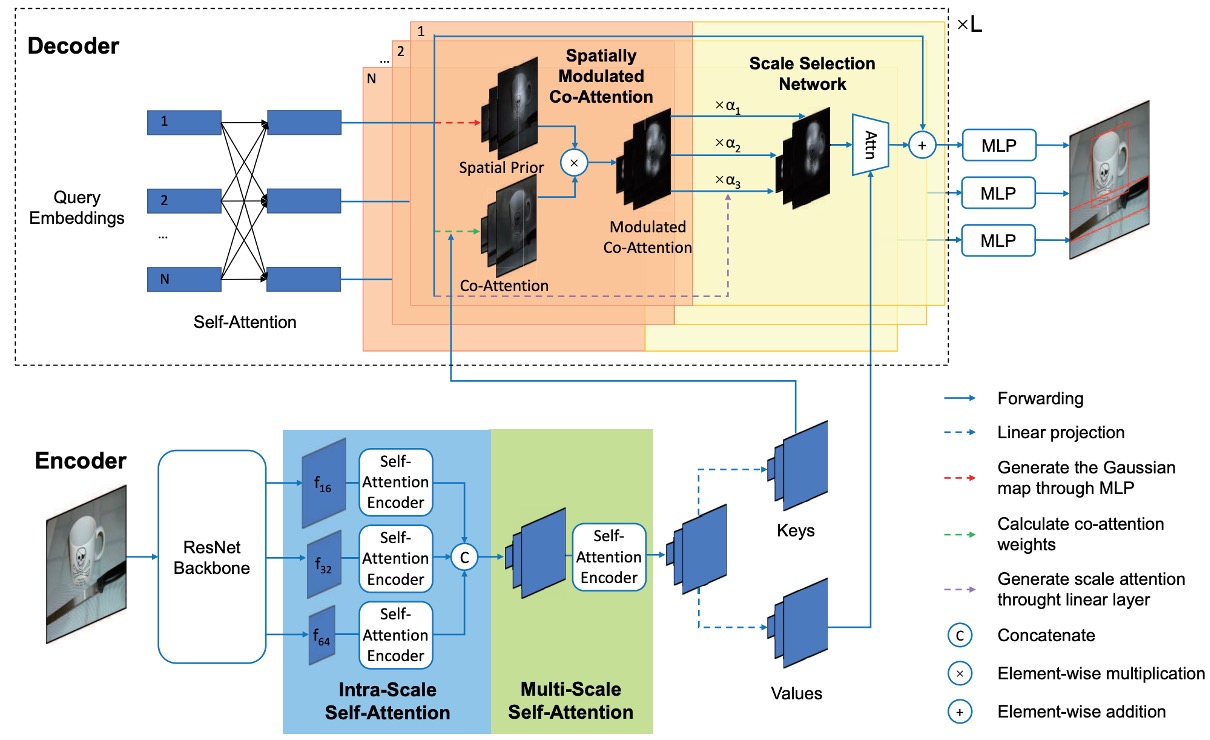
空間調製共注意力機制,(Spatially Modulated Co-Attention, SMCA)的核心思想是:
將可學習的跨注意力圖與手工設計的查詢空間先驗資訊相結合。
SMCA 動態預測與每個物件查詢對應的框的初始中心和比例,以產生 2D 空間類高斯權重圖。權重圖按元素與物件查詢和圖像特徵的共同關注特徵圖相乘,以更有效地聚合來自視覺特徵圖的查詢相關資訊。
簡單來說,原本的 DETR 沒有先驗知識,收斂很慢。
既然如此,我們給他一些先驗知識,讓他收斂得更快。
初步預測
每個物件查詢首先動態預測其責任物件的中心和比例,物件查詢 的預測中心和尺度可分別表示為:
其中,通過兩層 MLP 和 sigmoid 函數將物件查詢 投影為在 範圍內的歸一化中心預測,再經過逆向操作以得到圖像中的真實中心座標。
物件查詢 還會預測物件的寬高比例來生成 2D 高斯分布權重圖,並重新加權跨注意力圖,強調物件預測位置附近的特徵。
高斯權重圖
在預測物體中心 及尺度 之後,SMCA 生成 2D 高斯權重圖 ,其表達式為:
其中 是空間索引, 是一個超參數,用來調整高斯分布的寬度。
會對靠近中心的空間位置賦予較高的權重,而對遠離中心的位置賦予較低的權重。
利用生成的空間先驗 ,SMCA 將跨注意力圖 進行調制。對每個通過點積注意力生成的跨注意力圖 ,調整方式如下:
其中,SMCA 將空間權重圖 的對數與點積跨注意力加和,並對所有空間位置進行 softmax 正規化,從而增加預測邊界框附近的權重,限制跨注意力的空間模式搜索範圍,並加快模型的收斂速度。
和原本的注意力機制相比,這裡就只是多了一個 的項。
多頭 SMCA
在 SMCA 的多頭調制版本中,不同的跨注意力頭會根據各自的空間權重圖進行特定的特徵調制。
每個注意力頭從共享的中心位置 開始,並預測一個頭特定的偏移量 以及頭特定的尺度 。
由此可以基於頭特定的中心 和尺度生成高斯分布空間權重圖 。
多頭跨注意力特徵圖可表示為:
為了提升物體檢測效能,SMCA 整合了多尺度特徵。CNN 提取多尺度視覺特徵 ,對應的下採樣率為 16、32 和 64。為了降低計算成本,這些特徵直接從 CNN 骨幹網路中提取,並未使用 Feature Pyramid Network (FPN)。
為了自動選擇最適合的尺度,每個物體查詢會生成尺度選擇注意力權重:
不同尺度的跨注意力計算公式為:
這樣的機制允許每個物體查詢動態選擇最相關的尺度,抑制與其無關的尺度特徵。
在進行跨注意力計算後,更新的物體查詢特徵 被用於預測邊界框及分類分數:
邊界框預測還會結合初始的空間先驗,進一步調整預測的中心位置:
這樣可以確保邊界框預測與 SMCA 中高亮的跨注意力區域密切相關。
訓練策略
-
資料集:
- 實驗使用 COCO 2017 資料集進行驗證。訓練集包含 118,000 張圖像,驗證集包含 5,000 張圖像。性能評估使用 mAP(Mean Average Precision),與之前的研究一致。
-
實驗實現細節:
- 實驗遵循原始 DETR 的設置。特徵提取使用 ResNet-50,標註為 SMCA-R50。
- 與 DETR 不同的是,SMCA 使用 300 個物體查詢(而非 100 個),並將原始的交叉熵分類損失替換為 focal loss,這有助於解決前景/背景分類中的正負樣本不平衡問題。focal loss 的初始概率設置為 0.01 以穩定訓練過程。
-
訓練設置:
- 模型訓練 50 個 epoch,第 40 個 epoch 時學習率減少至原來的 1/10。
- Transformer 編碼器的初始學習率設為 ,而預訓練的 ResNet 骨幹網路學習率設為 ,並使用 AdamW 優化器進行優化。
- 多尺度特徵編碼的預設下採樣率為 16、32、64。
-
損失函數與匹配:
- 雙邊匹配過程中的分類損失、L1 距離損失和 GIoU 損失的係數分別設為 2、5、2。
- 在經過雙邊匹配後,模型最小化分類損失、邊界框 L1 損失和 GIoU 損失來進行訓練,損失的係數與前述相同。
-
其他實驗細節:
- Transformer 層使用 post-norm 設置,與之前的研究一致。
- 資料增強過程中使用隨機裁剪,裁剪後的最大寬度或高度設定為 1333。
- 所有模型均在 8 張 V100 GPU 上進行訓練,每張 GPU 負責 1 張圖像。
討論
和 DETR 的比較
SMCA 與 DETR 共享相同的架構,唯獨在解碼器中引入了新的共注意力調制機制,並加入了一個額外的線性網路來生成空間調制先驗資訊。SMCA 的計算成本與每個 epoch 的訓練時間增量很小。
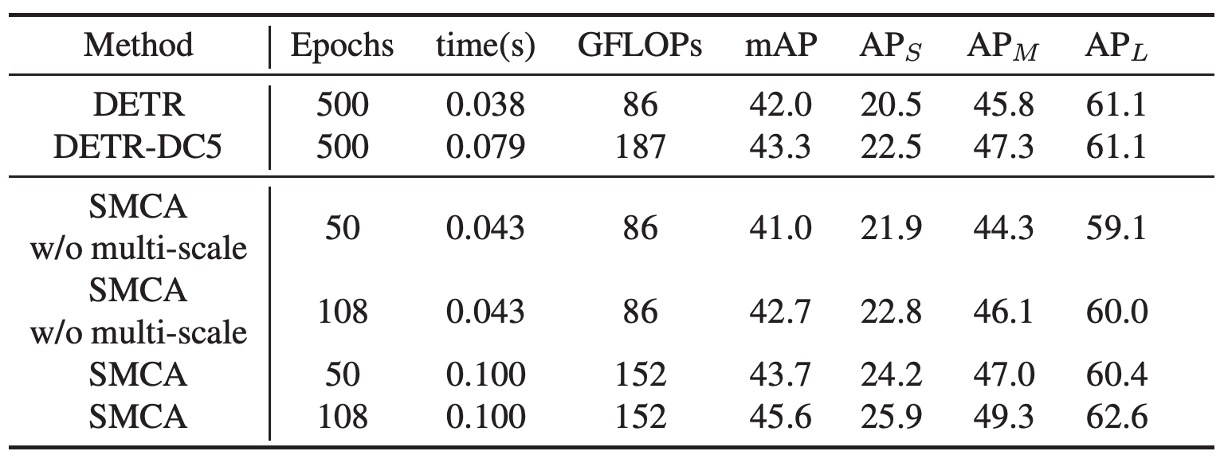
使用單尺度特徵時,SMCA 的自注意力維度設定為 256,前饋網路 (FFN) 的中間維度為 2048。使用多尺度特徵時,FFN 的中間維度設為 1024,並且在編碼器中使用 5 層的內部尺度與多尺度自注意力層,以保證與 DETR 相似的參數量,進行公平比較。
如上表所示,"SMCA w/o multi-scale" 在 50 個 epoch 訓練下,使用單尺度特徵時的 mAP 為 41.0,使用多尺度特徵時的 mAP 則達到 43.7。延長訓練時間後,單尺度特徵的 SMCA mAP 從 41.0 提升至 42.7,多尺度特徵的 SMCA 則從 43.7 提升至 45.6。
SMCA 的收斂速度比基於 DETR 的方法快 10 倍。SMCA 使用較薄的 Transformer 層以及 ResNet 骨幹網路中不帶擴張的卷積操作,在效率上與原始的擴張卷積 DETR 模型表現相當。
消融實驗
作者為了驗證 SMCA 各個組件的重要性,進行了一系列消融實驗。
Head-shared SMCA
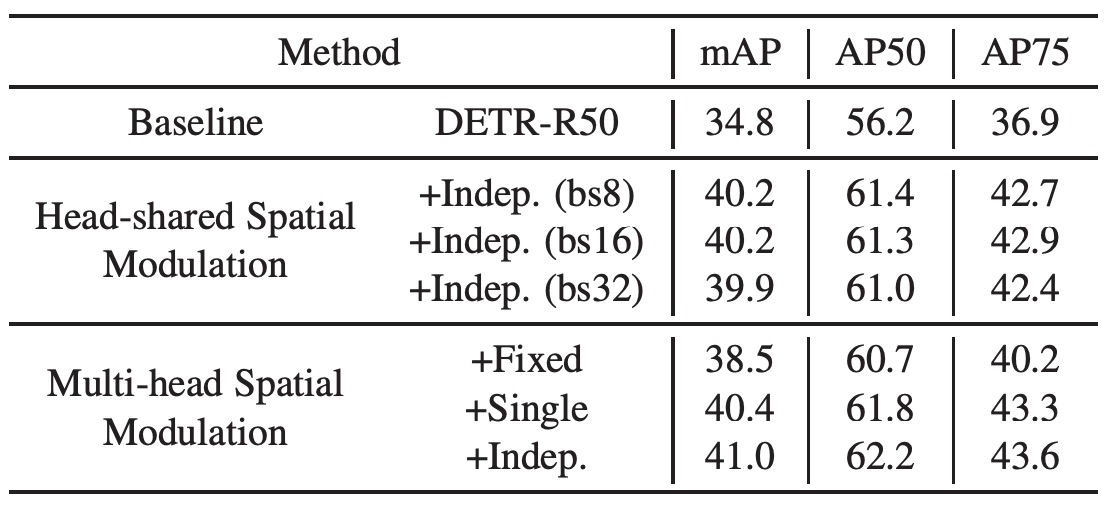
作者在基線 DETR 上添加頭共享的空間調制機制,並保持學習率、訓練計劃、自注意力參數等與基線模型相同。
結果顯示,該方法使 mAP 從 34.8 提升至 40.2,證明了 SMCA 的有效性,其不僅加快了 DETR 的收斂速度,還大幅提升了性能。另外不同批次大小的測試結果表明,SMCA 對批次大小不敏感。
使用多頭機制進行空間調制,將 Transformer 的每個頭調制為不同的空間權重圖。所有頭從相同的物體中心開始,並預測相對於共同中心的偏移量和頭特定的尺度。結果顯示,多頭空間調制的 mAP 為 41.0,相比頭共享的調制有進一步提升(從 40.2 提升至 41.0)。
作者還測試了固定尺度、高度與寬度共享或獨立預測的空間權重圖。當固定高斯分布尺度時(固定為 1),mAP 為 38.5(比基線提升了 3.7),證明了預測物體中心在空間調制中的作用。
Multi-head SMCA
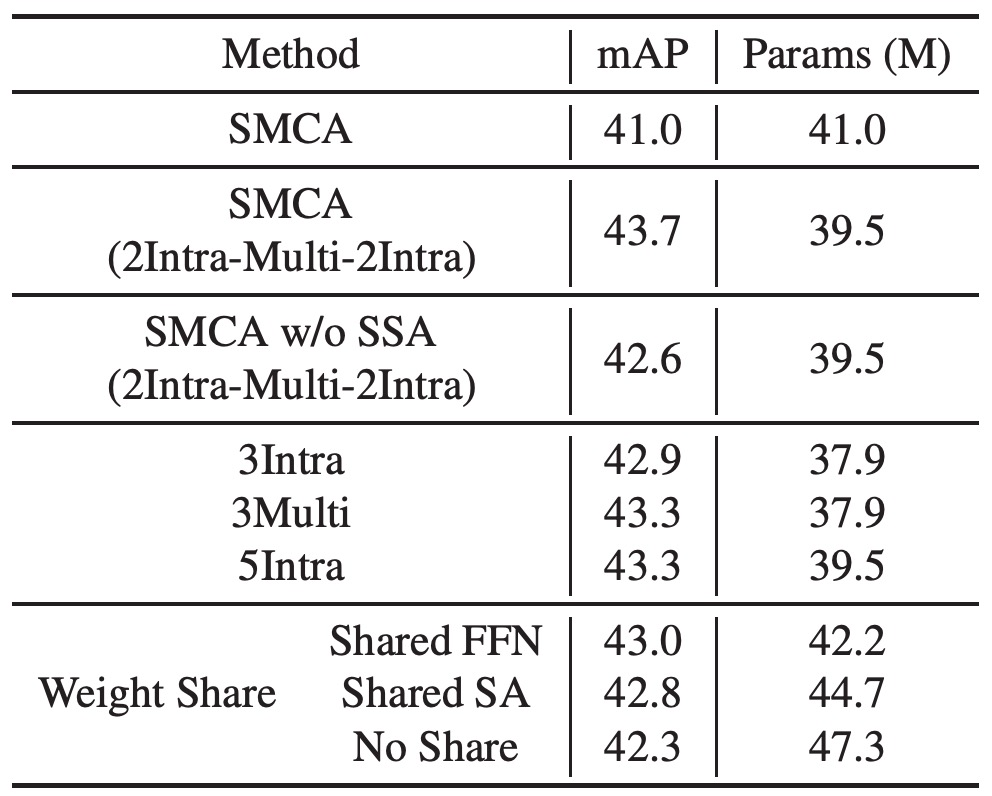
將多尺度特徵編碼引入編碼器中,使用 2 層內部尺度自注意力、1 層多尺度自注意力和再 2 層內部尺度自注意力(標記為“SMCA (2Intra-Multi-2Intra)”)。這一設計使性能從 41.0 提升至 43.7。若移除 SSA 後性能下降至 42.6。
將 2Intra-Multi-2Intra 設計替換為單純堆疊 5 層內部尺度自注意力層,性能下降至 43.3,這是因為缺乏跨尺度信息交換。雖然 5 層的內部尺度自注意力編碼器表現優於 3 層,但引入多尺度信息交換(3 層多尺度自注意力編碼器)的模型性能更佳。
作者最後選擇 2Intra-Multi-2Intra 組合設計,該設計在參數較少的情況下達到了 43.7 mAP,並且共享 Transformer 和 FFN 的權重進一步增強了模型的泛化能力。
對比其他 SoTA 架構
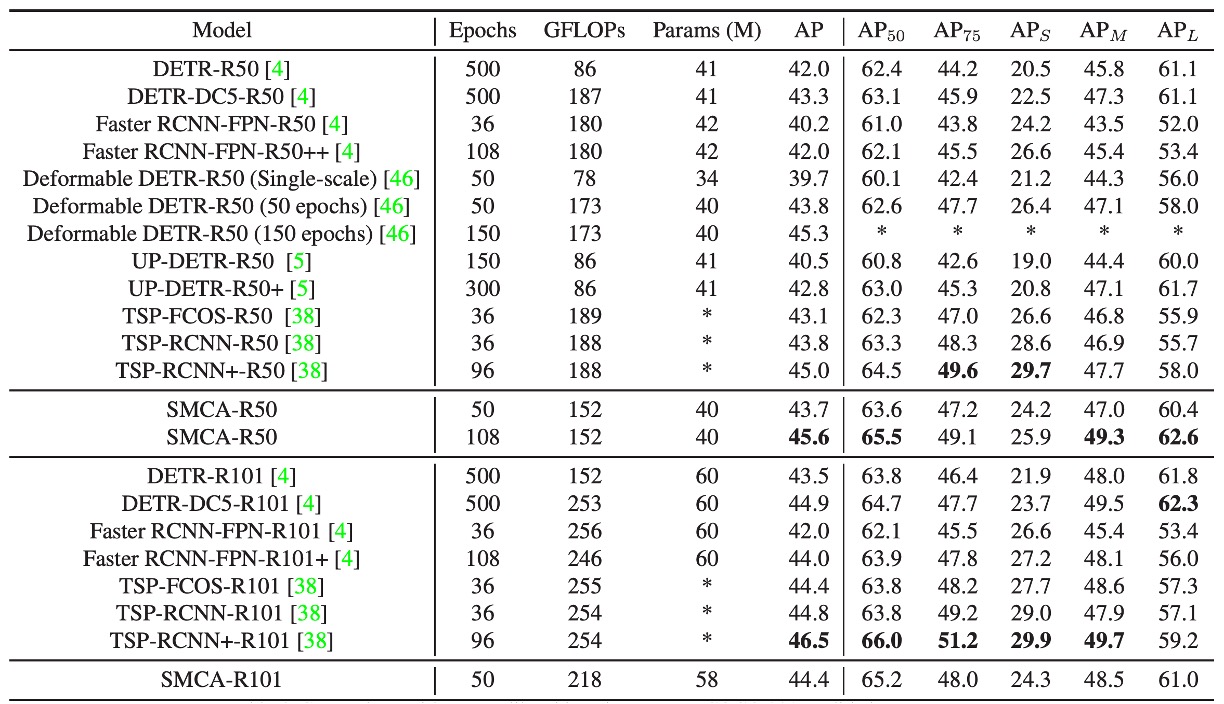
在上表中,作者將 SMCA 與其他物體檢測框架在 COCO 2017 驗證集上的性能進行比較。
-
與 DETR 的比較:
- DETR 使用端到端的 Transformer 進行物體檢測,DETR-R50 和 DETR-DC5-R50 分別指的是基於 ResNet-50 和擴張 ResNet-50 的 DETR 版本。相較於 DETR,SMCA 在小、中、大物體的檢測性能上具有更快的收斂速度和更好的性能。
-
與 Faster RCNN 的比較:
- Faster RCNN 與 FPN(特徵金字塔網路)結合,是一個兩階段的物體檢測方法。在 109 個 epoch 的訓練下,SMCA 的 mAP (45.6) 超過 Faster RCNN-FPN-R50 (42.0)。
- Faster RCNN 在檢測小物體上具有優勢(小物體 mAP 為 26.6 vs SMCA 的 25.9),但 SMCA 在大物體的定位上更強(大物體 mAP 為 62.6 vs 53.4),這是因為 SMCA 的多尺度自注意力機制能夠在所有尺度和位置之間傳播信息。
-
與 Deformable DETR 的比較:
- Deformable DETR 將原始的 DETR 自注意力替換為局部可變形注意力,在編碼器和解碼器中使用。這使其比原始 DETR 具有更快的收斂速度,但在大物體檢測的性能有所下降。
- Deformable DETR 的大物體 mAP 從 DETR 的 61.1 降至 58.0。相比之下,SMCA 採用空間調制共注意力,通過約束共注意力在動態估計的物體位置附近進行搜索,從而加快收斂速度並提升大物體的檢測性能(SMCA 的大物體 mAP 為 60.4,Deformable DETR 為 59.0)。
- SMCA 在 50 個 epoch 時的 mAP (43.7) 與 Deformable DETR (43.8) 相當,但 SMCA 更擅長檢測大物體,而 Deformable DETR 在小物體檢測上更有優勢。
-
與 UP-DETR 的比較:
- UP-DETR 探索了無監督學習來加快 DETR 的收斂速度。相比之下,SMCA 的收斂速度和性能優於 UP-DETR,在 108 個 epoch 時,SMCA 的 mAP 為 45.6,而 UP-DETR 在 300 個 epoch 時的 mAP 為 42.8。
-
與 TSP-FCOS 和 TSP-RCNN 的比較:
- TSP-FCOS 和 TSP-RCNN 結合了 DETR 的匈牙利匹配方法和 FCOS 以及 RCNN 檢測器,具有比 DETR 更快的收斂速度和更好的性能。
- 與 Deformable DETR 和 Faster RCNN-FPN 類似,TSP-FCOS 和 TSP-RCNN 在檢測小物體方面具有優勢,但在大物體檢測上稍遜。
- 在短期訓練(38 個 epoch)中,SMCA-R50 的 mAP (43.7) 與 TSP-RCNN (43.8) 相當,均優於 TSP-FCOS (43.1)。在長期訓練中,SMCA 在 108 個 epoch 時達到 45.6 的 mAP,超過了 TSP-RCNN 在 96 個 epoch 時的 45.0。
-
更換 ResNet-101 Backbone 的比較:
- 將 ResNet-50 替換為 ResNet-101 骨幹網路後,性能提升的趨勢與使用 ResNet-50 的情況相似。
結論
在這篇論文中,作者成功將空間調制共注意力機制(SMCA)融入到 DETR 框架中,實現了顯著的性能提升。
原本需要 500 個 epoch 的訓練過程縮短至 108 個 epoch,同時 mAP 從 43.4 提升至 45.6,這表明 SMCA 能夠在保持較低推理成本的情況下提高檢測精度。通過探索全域特徵資訊,SMCA 展示了在物體檢測中提高效率和性能的潛力。
後續還有幾篇持續改進 DETR 的論文,讓我們繼續看下去。