[19.11] EfficientDet

BiFPN 才是本體
EfficientDet: Scalable and Efficient Object Detection
在大約半年前 Google 提出了 NAS-FPN,但顯然在他們公司內部有其他人認為這不是一個好方向。
所以他們完全捨棄了 NAS-FPN 得到的搜索結果,重新基於 FPN 重新設計了一個新的特徵融合模塊,並稱之為 BiFPN。
定義問題
FPN 這一項開創性的工作自從發布以來,已經廣泛應用到各種目標檢測任務中。
後續也有相當多樣的變體和改善的方式,我們可以從下圖看到大致的發展軌跡:
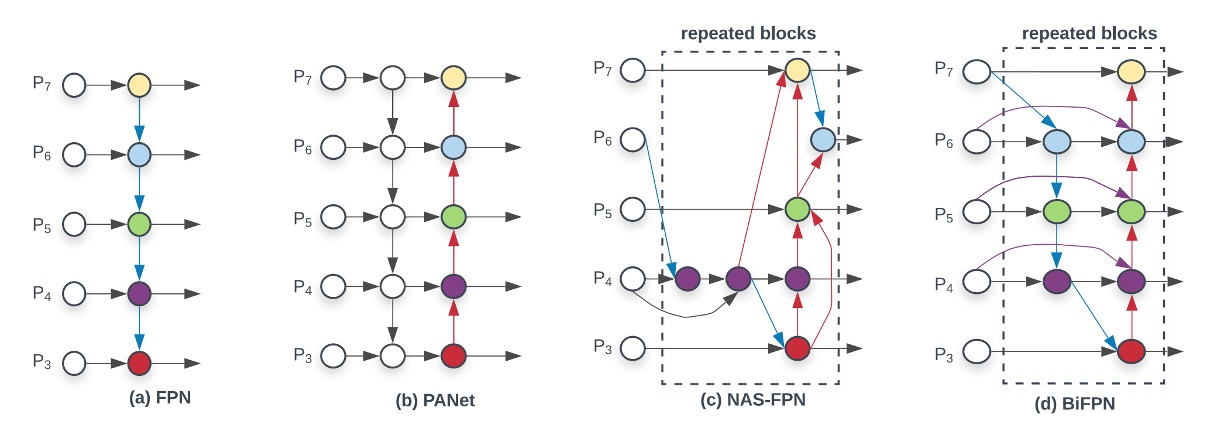
從最左邊的 FPN 開始,在不同解析度的特徵圖上進行特徵融合,從最深的特徵圖一路進行上採樣,然後相加回到較淺的特徵圖上。
後續提出的 PANet 認為只有單純一條路線加回來是不夠的,所以提出了一條新的路線:再進行一輪下採樣相加。這樣做的目的我們之前也有提過,就是為了建立一條從最淺層到最深層的特徵融合捷徑,讓模型可以更好地利用不同層次的特徵。
接著 NAS-FPN 提出了一個自動搜索的方法,規劃了多層的特徵融合結構,讓模型自己去找出最好的特徵融合結構方式,但這種方法的缺點也很明顯,就是難以解釋和控制。
所以在這篇論文中,同樣來自 Google 的作者不考慮 NAS 的方式,而是回過頭去找尋 PANet 的優點,並著重於兩個觀點:
- 特徵融合不能只是單純的相加,而是要考慮到特徵的重要性,進行加權相加。
- FPN 的層數應隨著模型規模進行縮放。
解決問題
模型架構
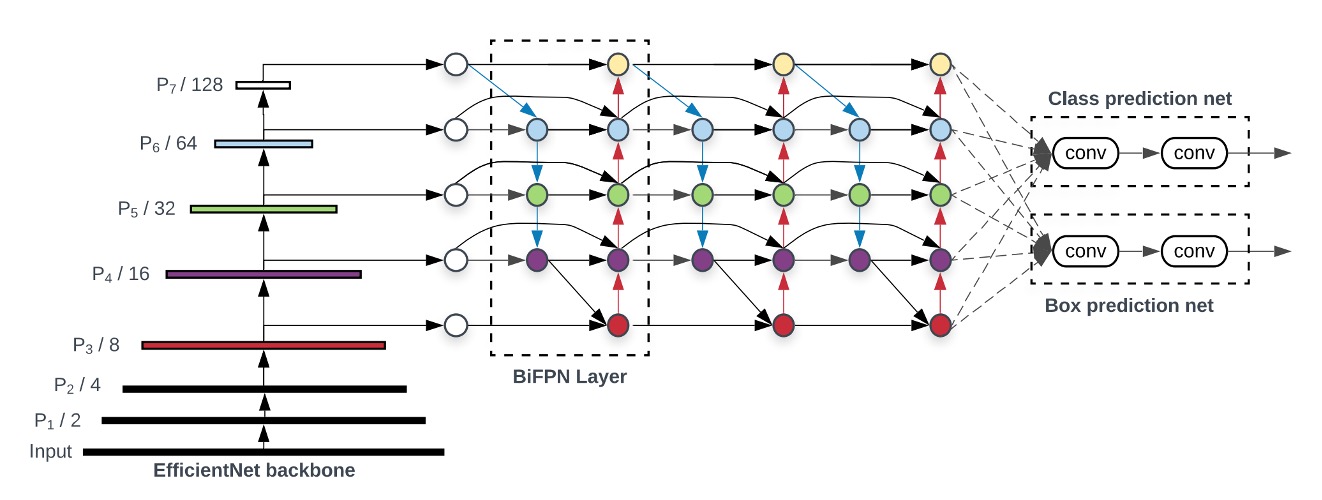
作者為了要展示出 BiFPN 的有效性,選了 RetinaNet 這個經典的目標檢測模型,並抽換了 FPN 的特徵融合模塊,改成了 BiFPN。
上圖中,最左邊是 Backbone,我們不用管他,這不是本文的重點;最右邊的是 Head,也不是本文的重點。我們只需要專心地看中間的 BiFPN 就好。
這裡的設計是從 PANet 出發,做了幾個改進,這裡讓我們用小畫家來畫一下:
-
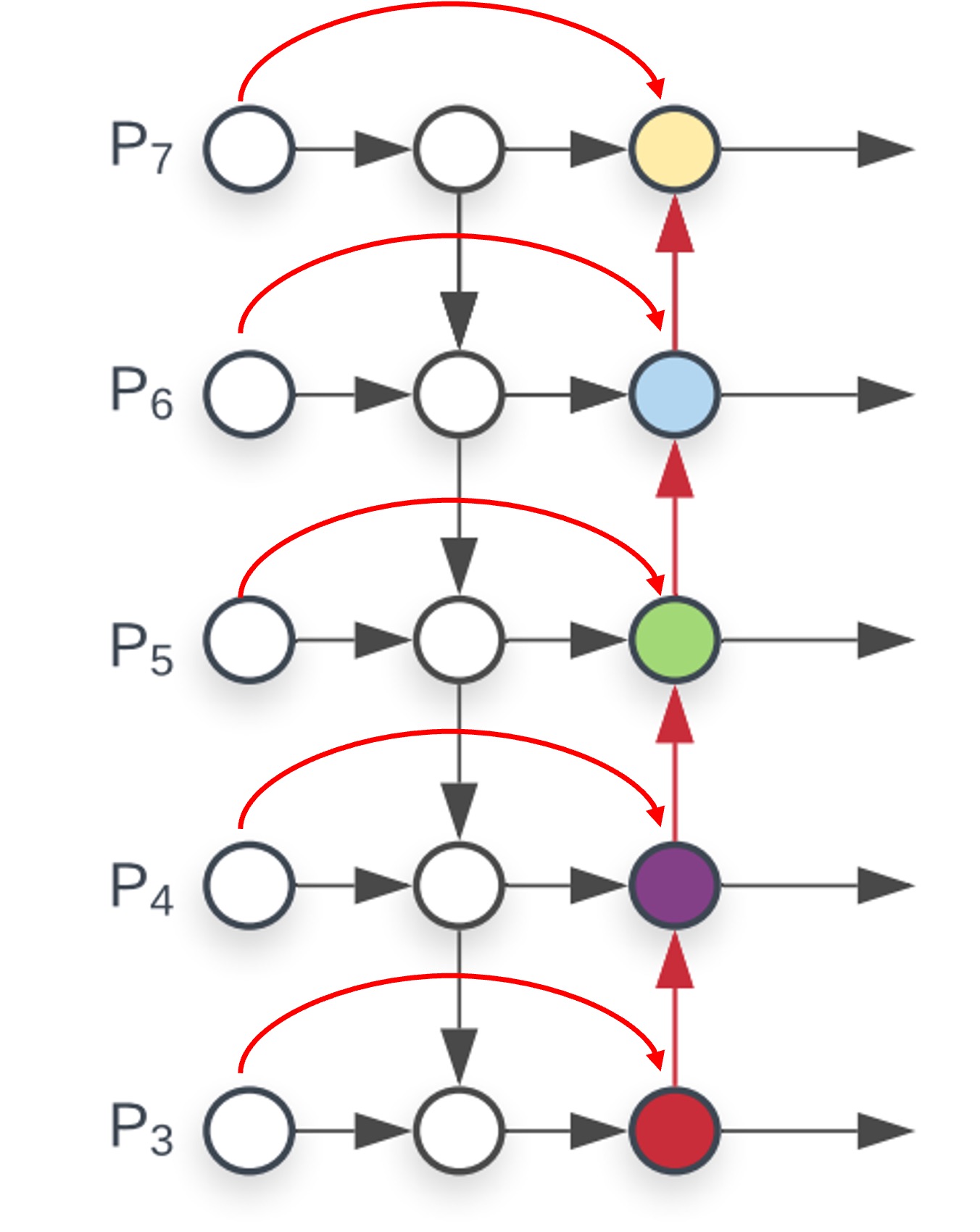
跨尺度連接:
我們從 PANet 開始改,這裡新增跨尺度連接,然後每個連接要進行「加權」相加,所以每個節點新增一組權重參數。
-
移除低貢獻節點:
看一下上面的圖,你會發現最深層有個節點只有一組連接,這顯然是低效的,不如就刪了;最淺層的節點由於沒有要再接收更上層的特徵,所以兩個節點功能重複了,也可以刪掉。
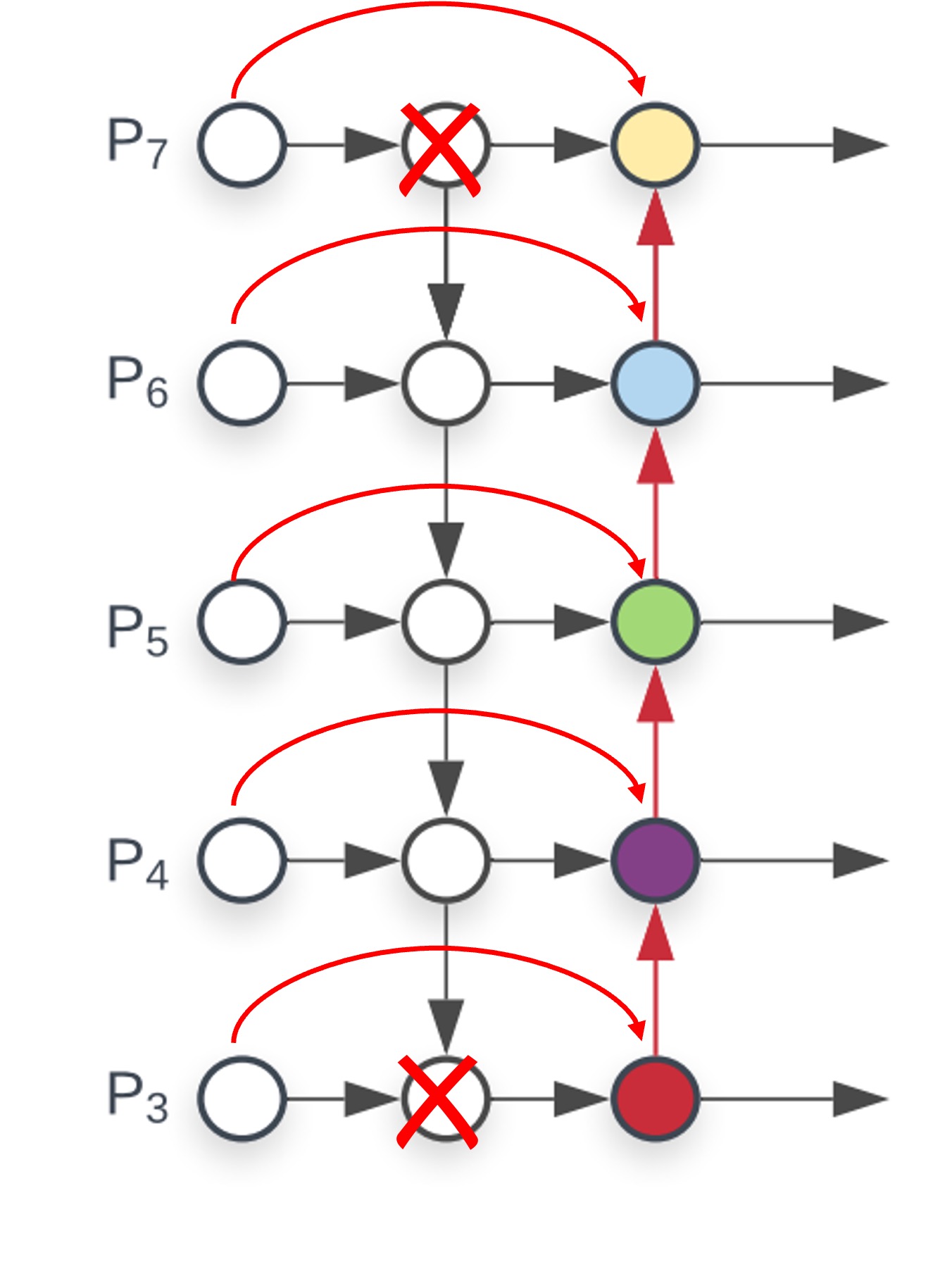
做完上面兩個步驟,我們就得到了 BiFPN 的結構。
在這裡作者還提到一個重要的觀點,他把這個結構視為一個「模組」,因此以此為單元,可以進行多層的堆疊,這樣就可以隨著模型規模的增大,進行更多層的特徵融合。
在原始的 PANet 中沒有展示出這個概念,他們只有一層上採樣和一層下採樣。有了模組堆疊的概念後,我們可以對 FPN 和 PANet 都應用這種堆疊操作,這樣也可以提升模型的性能。
模型縮放
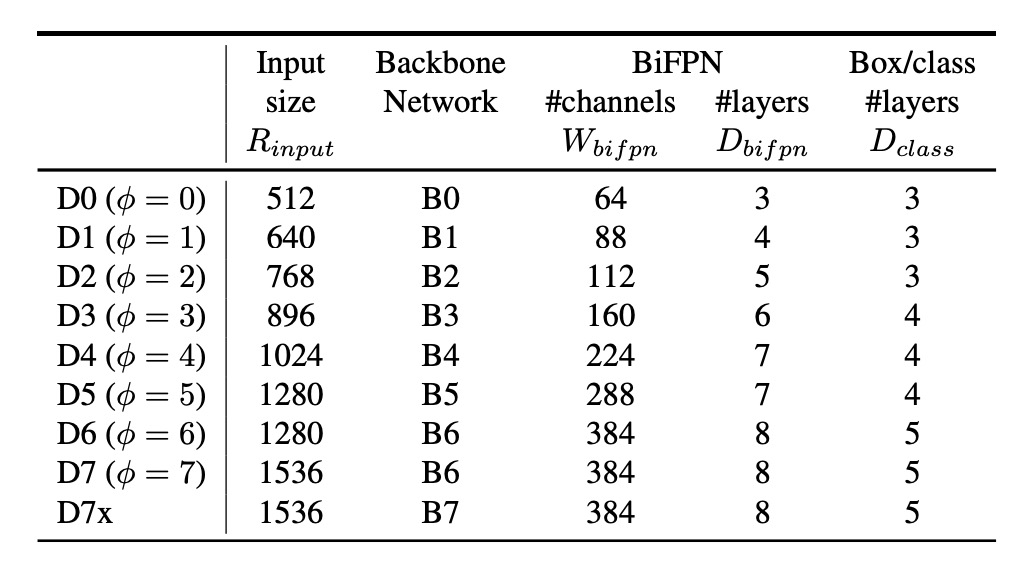
除了新的架構之外,作者也延續 EfficientNet 的思路,提出了一個模型縮放的概念。
大概的意思是既然 Backbone 可以做縮放,那麼 FPN 也應該可以做縮放,這樣才能更好地配合不同規模的模型。經過實驗,上表展示了對於不同規模的模型,BiFPN 的縮放配置,可以看到隨著模型規模的增大,BiFPN 的層數和通道數量也相對地增加。
加權平均

最後,作者討論到該如何設計加權特徵圖的權重。
在論文中提出了三種設計方式:
- 無界融合:不對權重進行任何約束,讓模型自己學習,但結果非常不穩定,後續略過不談。
- Softmax 融合:對權重進行 softmax 計算,讓權重和為 1。
- ReLU 限制:對權重進行 ReLU 計算,讓權重為正數,接著規範其權重和為 1。
在上圖中作者展示了第二種和第三種的實驗效果,可以看到 ReLU 和 Softmax 的效果表現一致,但 ReLU 快了 30%,這也是作者推薦的設計方式。
討論
在 COCO 上的表現
作者基於 COCO 2017 檢測資料集進行實驗,使用了 118,000 張訓練影像。
訓練過程中,作者採用了隨機梯度下降(SGD)優化器,動量設為 0.9,權重衰減為 4e-5。學習率在初始週期從 0 線性增加至 0.16,隨後應用了餘弦衰減規則進行退火。此外,每次卷積操作後,作者引入了同步批規範,批規範的衰減係數為 0.99,epsilon 值設為 1e-3。
模型使用了 SiLU(Swish-1)作為活化函數,並應用了衰減係數為 0.9998 的指數移動平均值來提高模型穩定性。在訓練過程中,作者採用了焦點損失函數,α 設為 0.25,γ 設為 1.5。模型的數據增強策略包括水平翻轉和縮放抖動,影像大小在裁切之前隨機調整為原始大小的 0.1 至 2.0 倍。此外,作者在評估過程中使用了軟性非極大值抑制(Soft NMS)。
在訓練資源配置方面,作者對 EfficientDet-D0 至 D6 模型在 32 個 TPUv3 核心上進行了 300 個訓練週期,而對於 EfficientDet-D7 和 D7x 模型,則在 128 個 TPUv3 核心上進行了 600 個訓練週期,總批量大小為 128。
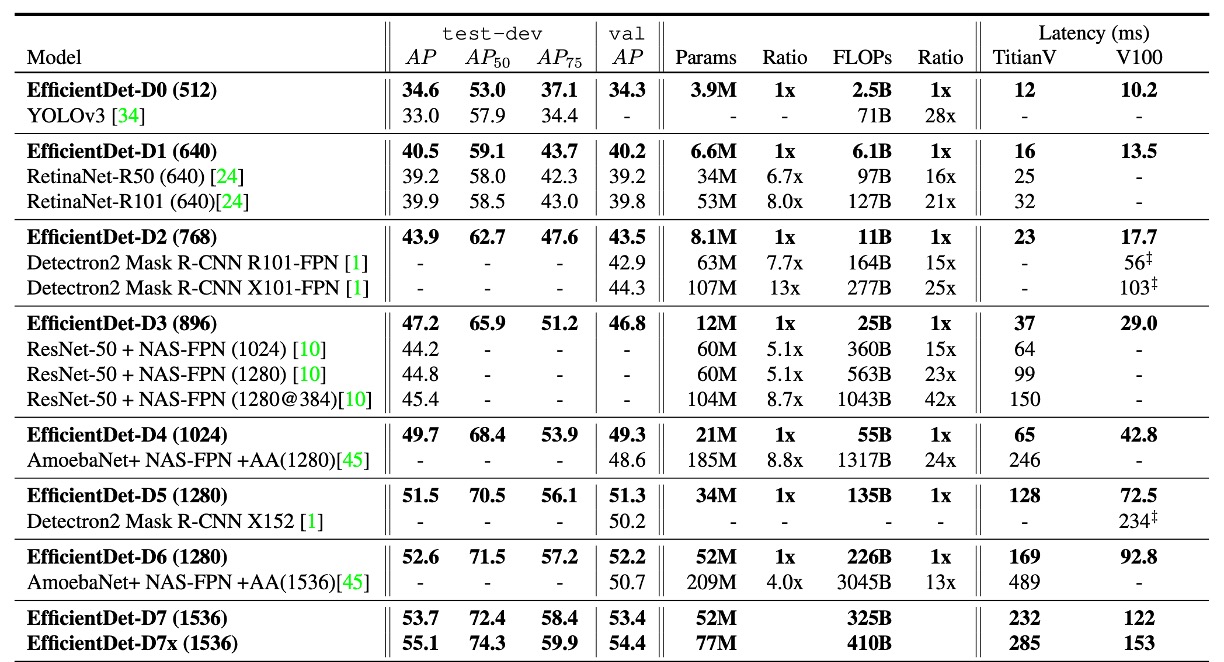
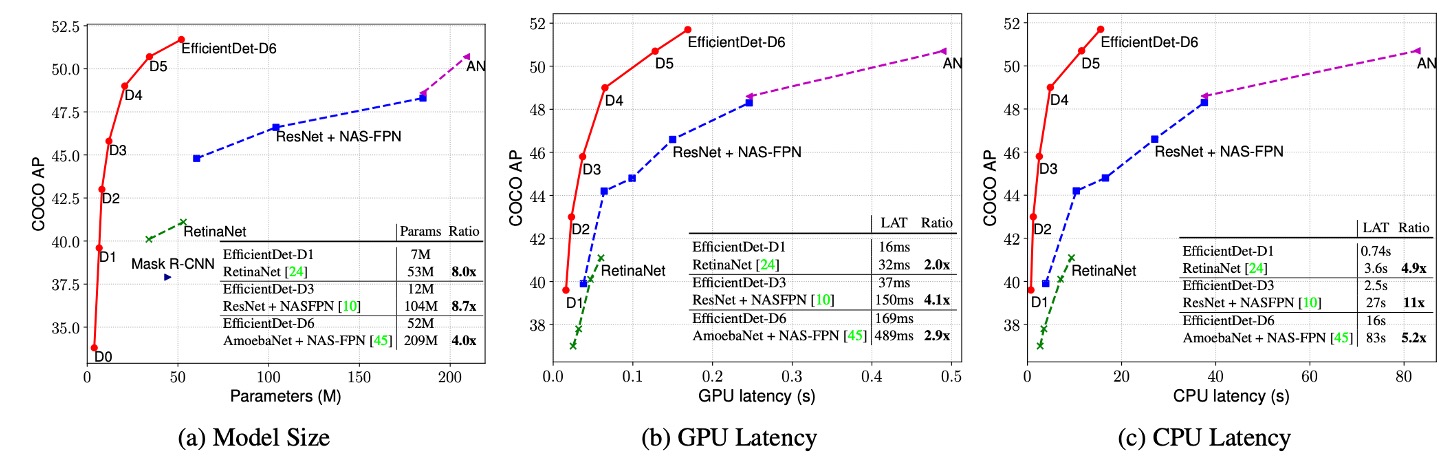
實驗結果顯示,EfficientDet 在不同精度和資源限制下均表現出優異的效率。相比於先前的偵測器,EfficientDet 模型在尺寸上縮小了 4 至 9 倍,FLOPs(浮點運算次數)減少了 13 至 42 倍。特別是,EfficientDet-D0 與 YOLOv3 在精度相當的情況下,FLOP 次數減少了 28 倍。與 RetinaNet 和 Mask-RCNN 相比,EfficientDet 在保持相似精度的同時,參數數量減少了 8 倍,FLOP 減少了 21 倍。
在高精度的設定下,EfficientDet-D7x 在測試訓練集中達到了 55.1 AP,顯著超越了現有技術,在準確性提升 4 AP 的同時,效率提高了 7 倍。此外,作者還比較了 Titan-V FP32、V100 GPU FP16 和單執行緒 CPU 上的推理延遲,並指出 V100 的推理延遲包含了端對端的預處理和後處理,展示了 EfficientDet 在推理速度上的優勢。
結論
相比於傳統的 FPN 架構,BiFPN 通過選擇性加權和輕量化設計,在不顯著增加計算成本的情況下,實現了更好的多尺度特徵融合效果。
簡單好用,是我們實作模型的好夥伴,在這裡也推薦給你試試。