[17.07] NASNet

搜索網路架構
Learning Transferable Architectures for Scalable Image Recognition
當你拿到一根鎚子,你看什麼都像是釘子。
*
從深度學習神經網路開始流行之後,如何構建一個有效的網路架構就成為了一個重要的問題。
為了解決這個問題,研究人員提出了許多自動搜索網路架構(Neural Architecture Search, NAS)的方法。
而其中的佼佼者就是 Google 團隊,你可以在各個地方看到他們拿著 NAS 技術在各種地方搜索。
Neural Architecture Search(NAS)是一種自動化技術,專門用於設計和優化深度學習模型架構。它旨在克服手動設計神經網路架構的挑戰和局限性,特別是在處理複雜數據或特定應用場景時。通過自動搜索流程,NAS 可以辨識出最高效的網路結構,從而提升模型性能,減少設計過程所需的時間與專業知識。
定義問題
從 AlexNet 流行起來,到現在的過去幾年間,各種不同網路架構蓬勃發展。
然而,這些網路架構的設計通常是基於經驗和直覺,而非嚴格的理論基礎。
這導致了許多問題,例如:
- 人們不知道哪些網路架構是最好的。
- 設計網路架構需要大量的專業知識和經驗。
- 網路架構的設計過程通常是耗時且耗費資源。
理論基礎的部分在這裡先撇開不談,本篇論文要提出一個自動搜索網路架構的方法,而這個方法可以幫助我們解決上述的「部分」問題。
解決問題
可遷移架構
在現階段中,所有論文的目標都是一致的:就是在 ImageNet 資料集上達到最佳的性能。
但是 ImageNet 太大了,如果直接在 ImageNet 上搜索適合的網路架構,會消耗非常可觀的資源。
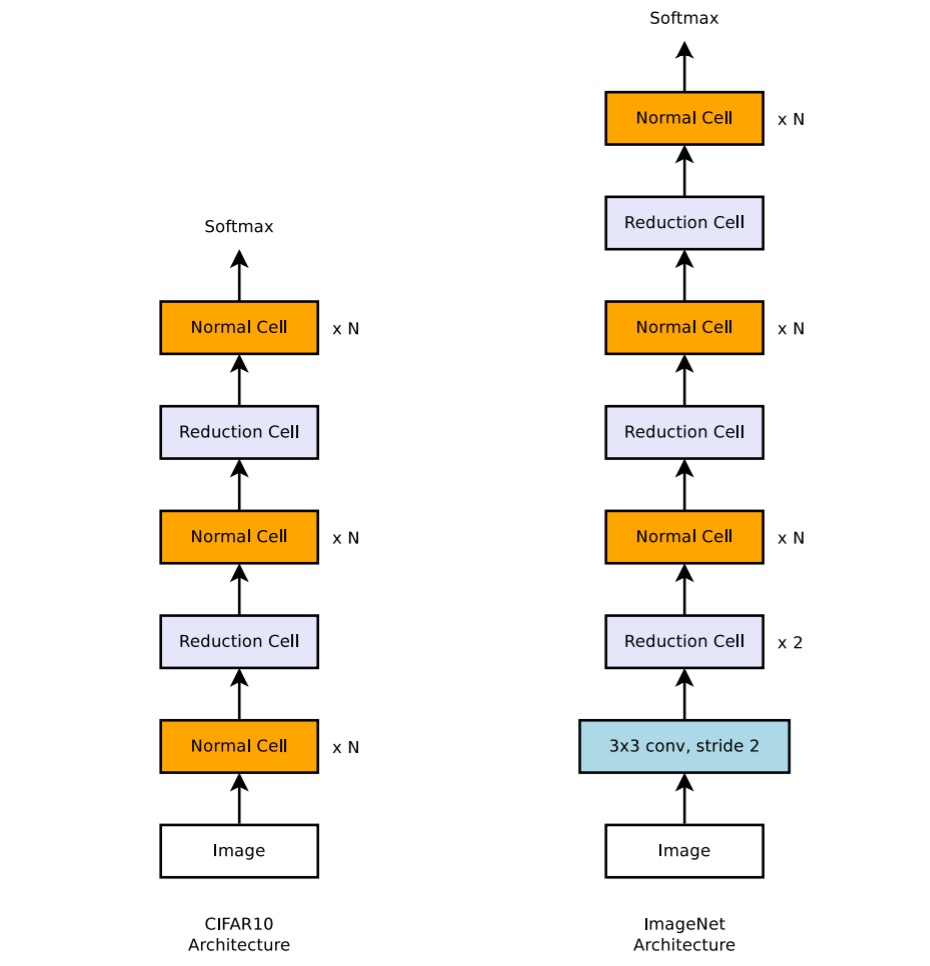
因此,在本篇論文中提出先在 CIFAR-10 資料集上搜索適合的網路架構,然後再將這個網路架構遷移到 ImageNet 上。
基礎結構
作者提出了兩個可以用來構建網路架構的基礎結構:
- Normal Cell:主要功能是維持輸入特徵圖的維度(即高度和寬度)。這樣的設計確保了特徵提取過程中空間信息的完整性,有助於深層網路中信息的有效傳遞。
- Reduction Cell:主要功能是減少特徵圖的空間維度,具體是將高度和寬度縮小一半。這通過將步長設置為 2 來實現,有效地降低了計算量並增加了模型的抽象能力。
雖然 Reduction 和 Normal Cell 可以有相同的架構,但根據經驗,學習兩種獨立的架構是有益的。
此外,每次減少空間維度時,為保持信息密度,作者通過加倍濾波器的數量來補償信息的損失。
這種設計靈感來自於 Inception 和 ResNet 結構,其中層次的深度和濾波器的數量根據具體的應用需求進行調整。
搜索過程
在搜索空間中,每個卷積單元接收兩個初始隱藏狀態 和 ,這兩個狀態來自於前兩個較低層的單元輸出或是輸入圖像。
整個搜索過程會透過 RNN 來進行,RNN 會預測卷積單元的結構,並且根據預測結果來生成新的隱藏狀態。
-
RNN 的預測過程
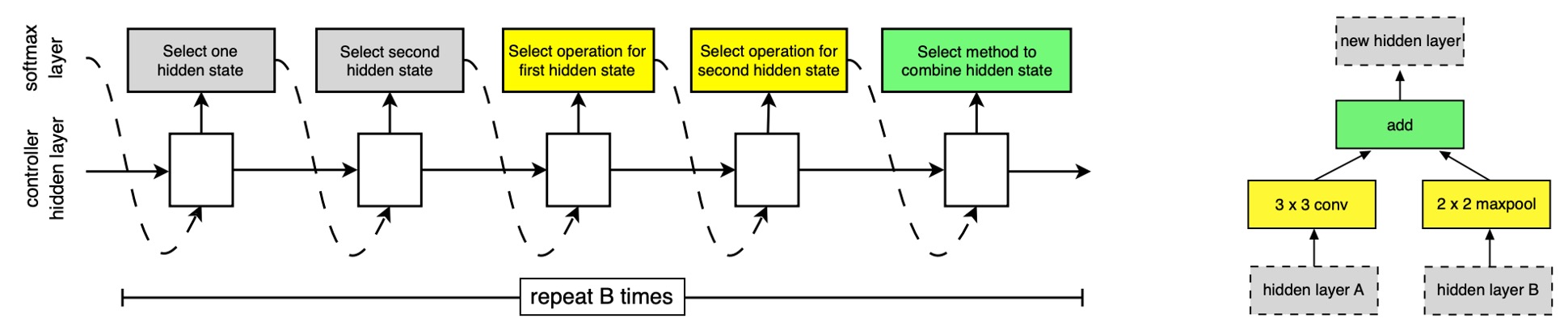
RNN 會遞歸地預測卷積單元的結構,根據以下步驟:
- 選擇隱藏狀態:從 、 或前面區塊生成的隱藏狀態集中選擇一個隱藏狀態。
- 選擇第二個隱藏狀態:從與步驟 1 相同的選項中選擇第二個隱藏狀態。
- 選擇操作:對於步驟 1 選擇的隱藏狀態,選擇一個操作進行處理。
- 選擇第二個操作:對於步驟 2 選擇的隱藏狀態,同樣選擇一個操作進行處理。
- 合併輸出:選擇一種方法來結合步驟 3 和 4 的輸出以產生新的隱藏狀態。
-
預測步驟的重複與區塊
RNN 將上述 5 個預測步驟重複 B 次,對應於卷積單元中的 B 個區塊。
在實驗中,選擇 B=5 通常能提供良好的結果。
每一輪的預測都將新建立的隱藏狀態添加到現有隱藏狀態集合中,作為後續區塊中的潛在輸入。
-
操作選擇
RNN 從以下操作中進行選擇,這些操作基於它們在 CNN 文獻中的普及度:
- identity
- 1x3 then 3x1 convolution
- 1x7 then 7x1 convolution
- 3x3 dilated convolution
- 3x3 average pooling
- 3x3 max pooling
- 5x5 average pooling
- 5x5 max pooling
- 7x7 max pooling
- 1x1 convolution
- 3x3 convolution
- 3x3 depthwise separable convolution
- 5x5 depthwise separable convolution
- 7x7 depthwise separable convolution
-
合併方法
在步驟 5 中, RNN 選擇合併兩個隱藏狀態的方法,可能是兩個隱藏狀態之間的元素級加法或沿著過濾器維度的串聯。
DropPath 模組
在過去的文獻中,DropPath 技術可以用來防止過擬合,並且可以提高模型的泛化能力。
在本篇論文中,作者將 DropPath 技術應用到了搜索過程中,發現沒用。
於是改進了 DropPath 技術,並稱之為 ScheduledDropPath,這個技術會在訓練過程中「線性增加」丟棄模組的機率,實驗效果良好!
搜索實驗結果
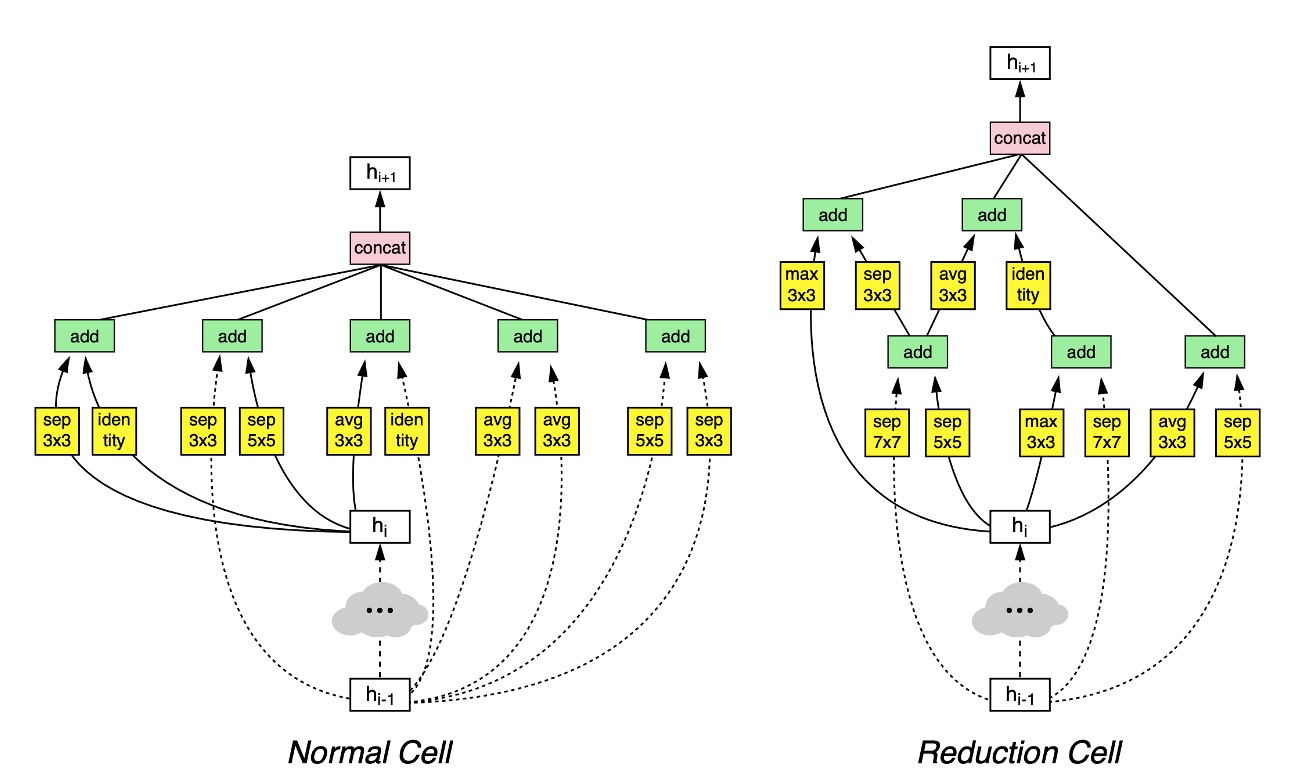
最終作者在 CIFAR-10 資料集上搜索到了一個有效的網路架構,如上圖。
這張圖看起來很複雜,但仔細看的話其實很好理解:
- 第 層走虛線;第 層走實線,最後兩者合併,得到 。
- 如果需要降採樣,,就走
Reduction Cell路徑,否則走Normal Cell路徑。
討論
在 CIFAR-10 上的結果
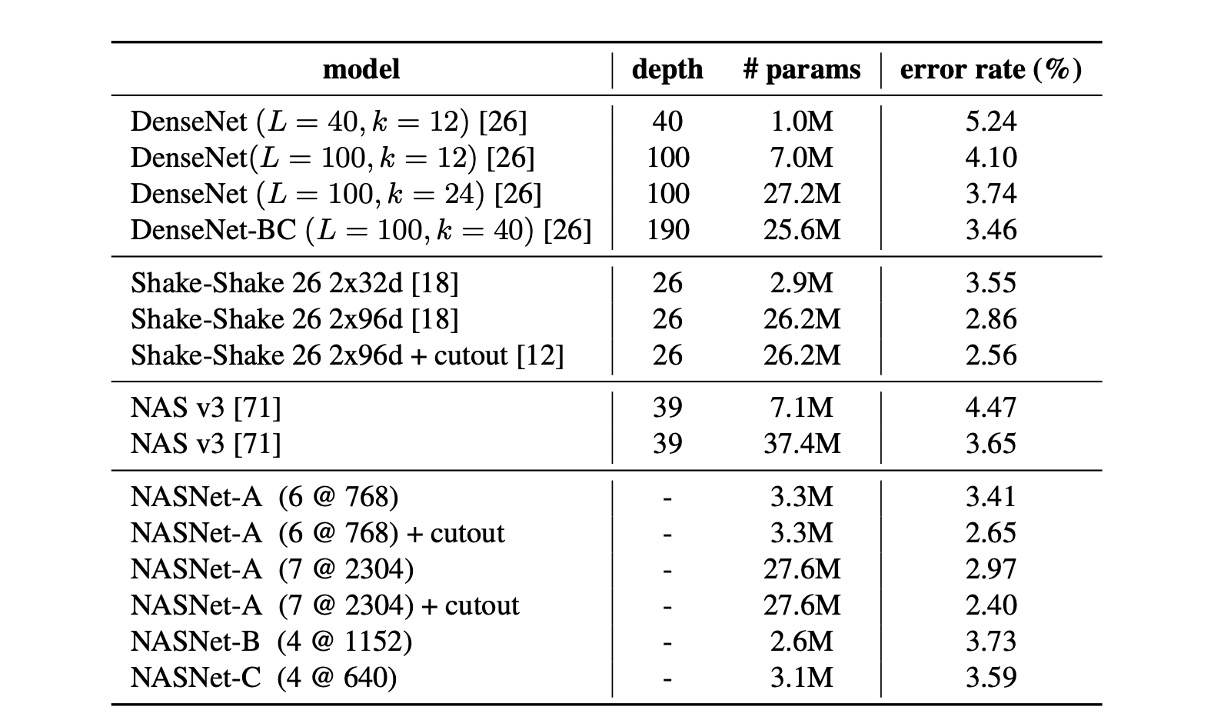
從表中可以看出,具有剪切資料增強的大型 NASNet-A 模型實現了 2.40% 的最先進錯誤率(5 次運行的平均值),略優於之前的最佳水平記錄為 2.56%。
作者提到,他們最佳單次運行錯誤率達到 2.19%。
遷移架構到 ImageNet
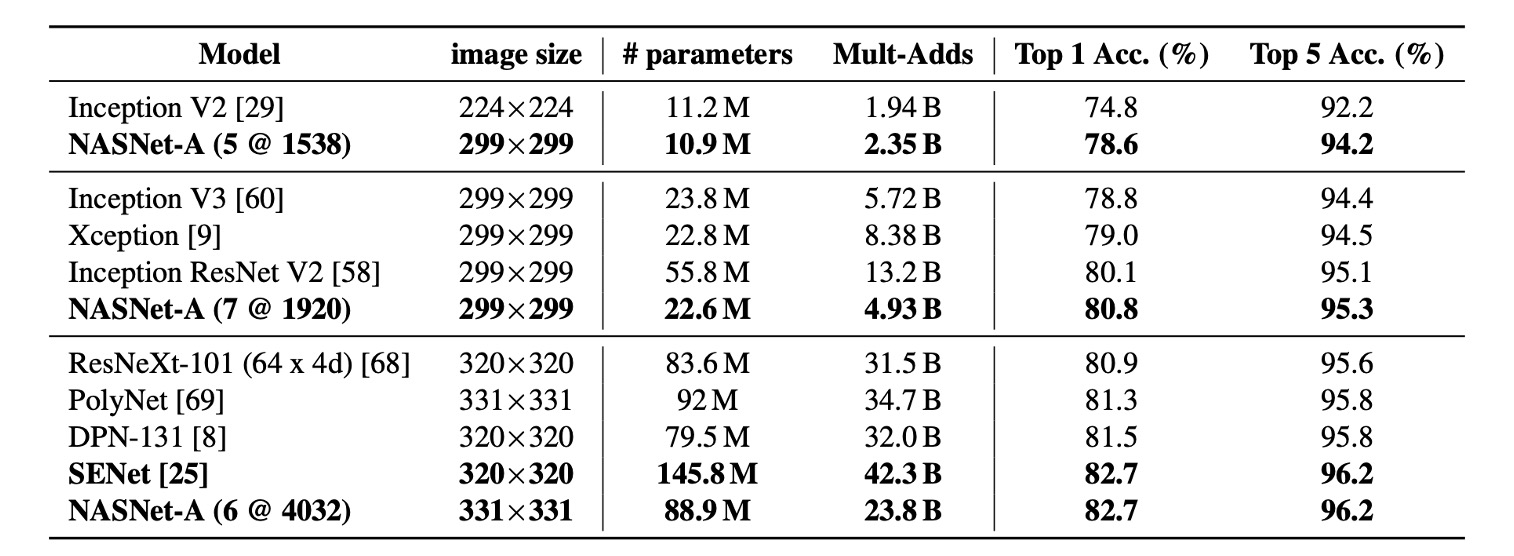
這裡遷移的只有網路結構,模型的部分是重新訓練的。
從上面表格證明,與同類架構相比,NASNet 以更少的浮點運算和參數實現了最先進的性能。
最大的模型基於單一非整合預測為 ImageNet 實現了新的最先進性能 (82.7%),比先前發布的最佳結果(DPN-131)提升了約 1.2%。
在行動裝置上的評比
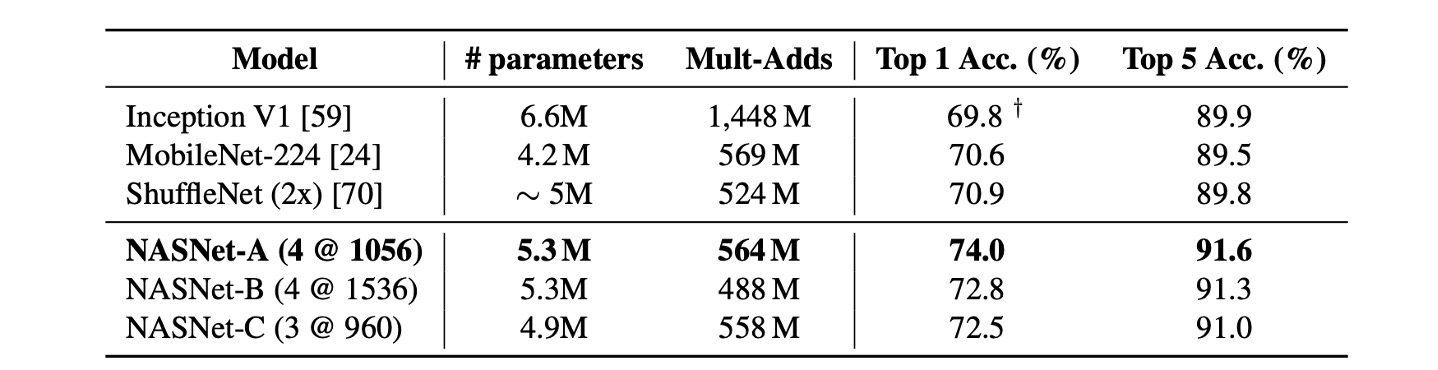
在之前的研究中,MobileNet 和 ShuffleNet 提供了最先進的結果,使用 ~550M 乘加操作在 224x224 影像上分別獲得了 70.6% 和 70.9% 的準確率。
而由 NASNet 所建構的架構,在計算需求相當的前提下,實現了超越先前模型的預測性能,達到 74.0% 準確率。
單純用運算量來評估模型,並不一定能反映出真正的性能,要實際上機推論才知道是不是真的有效果。
考慮到 NASNet 上存在大量的跨分支的相加和串聯運算,這些操作會讓多個分支互相等待,進而導致模型的效率下降。
結論
在本篇論文中,研究了一個直接在感興趣的資料集上學習模型架構的方法。
通過設計能夠解耦架構複雜度與網路深度的搜尋空間,從影像分類任務中學習到可擴展的卷積單元。
這一方法提升了模型的適應性,允許其他沒有足夠算力的研究者可以直接採用這些由 NAS 找出來的單元架構。
我們好奇的是,如果在資源足夠得情況下,直接針對 ImageNet 進行架構搜索,會不會得到更好的結果呢?
或許等到 Google 團隊之後來了興致,這個問題就會有答案了。