[21.03] ABINet

要不再想想?
視覺的辨識似乎已經走到了盡頭,人們開始思考如何讓模型更像人類一樣去理解和讀取文字。
定義問題
過去許多研究都是透過視覺的特徵進來文字辨識,但只要遇到模糊、遮蔽或是變形的文字,模型就會出現困難。因為視覺上的特徵已經受到破壞,模型無法從中找到文字的特徵。
為了解決這個問題,人們開始嘗試引入語言模型來幫助模型理解文字。
舉例來說,我們可能看到一個模糊的文字:APP?E,這時候我們可以透過語言模型來幫助我們理解這個文字應該是 APPLE。
目前人類的閱讀行為被認為具有:
- 自主性(Autonomous):視覺和語言可以獨立學習,語言可以幫助視覺理解文字。
- 雙向性(Bidirectional):不清楚的文字,可以從上下文推測,找到答案。
- 迭代性(Iterative):人們可以多次推理和修正,提高預測的準確度。
本篇論文的作者認為,既然人類可以這樣做,那麼模型也應該可以!
- 自主性(Autonomous):使用視覺模型和語言模型,獨立建模文字的視覺和語言特徵。
- 雙向性(Bidirectional):作者提出「雙向填字網路」任務,透過上下文來學習。
- 迭代性(Iterative):透過迭代的方式,不斷修正文字的預測。
想法有了,具體細節也有了,那麼就剩下實驗證明有效性了!
解決問題
作者提出了一個新的模型架構:ABINet,用來解決文字辨識的問題。
首先我們來看視覺模型的部分。
視覺模型
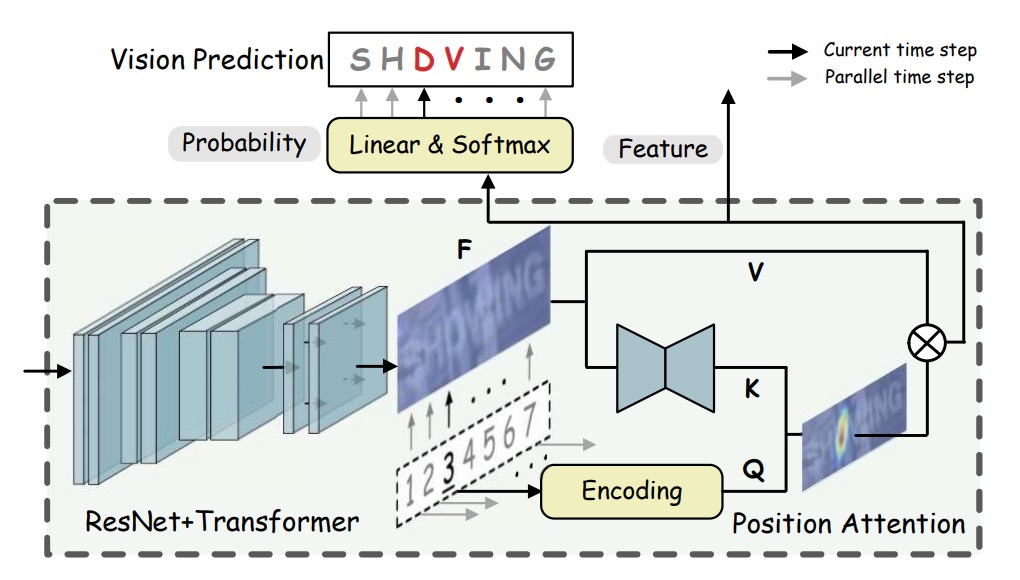
視覺模型像是之前常見的網路架構,使用 ResNet 進行特徵提取,將圖像 轉換為特徵表示:
其中, 與 為圖像尺寸, 為特徵維度。
視覺特徵 被轉換為字母機率,並且進行並行轉錄:
,表示字元序列的位置編碼(positional encodings),是字母順序的編碼矩陣,用來指引模型理解每個字元在序列中的位置。具體來說, 為字元序列的長度,代表要處理的字元數量; 是特徵的維度,用於表示每個位置的特徵空間。
,是通過函數 對特徵 進行處理後得到的「鍵」(key),並用於與查詢 進行對齊。
其中, 是圖像特徵輸出, 和 分別為圖像的高與寬。為了實現 的計算, 的具體實現方式為一個小型的 U-Net(mini U-Net)結構,該結構將視覺特徵降維,以獲得與字元序列長度相匹配的鍵特徵。
經過處理後, 的尺寸為 ,這是為了在空間上與字元順序位置編碼保持一致性。
,表示「值」(value),由 對 進行映射得到。在這裡, 採用的是恒等映射(identity mapping),即直接將 的特徵傳遞過來,不進行額外的變換。這使得 的 尺寸同樣為 ,並與 保持相同的特徵空間和空間解析度。
簡單來說,就是透過位置查詢,將圖像特徵轉換為對應字元的預測機率,使得模型能夠根據字元的順序位置信息和圖像特徵進行精確的辨識。
語言模型
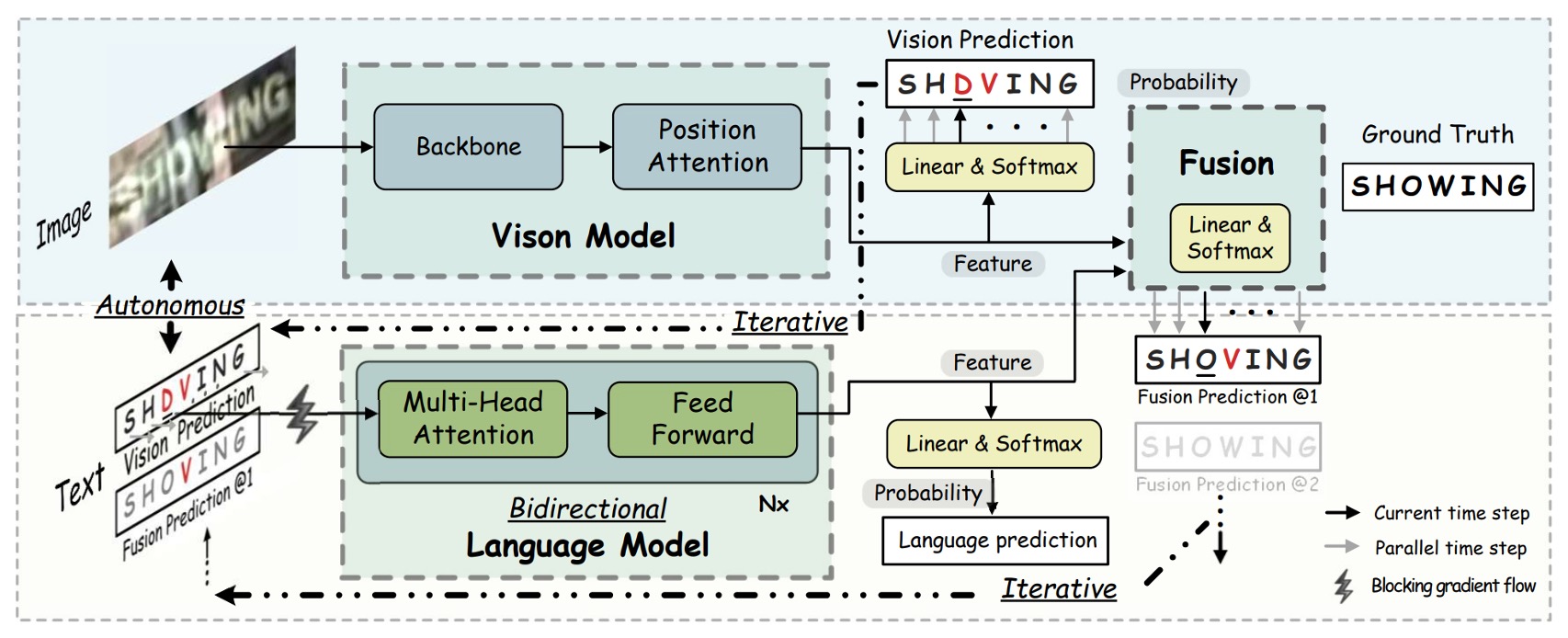
視覺模型我們看完了,然後作者繼續串接語言模型,這裡有幾個重要的策略:
-
自主策略(Autonomous Strategy):
如上圖,語言模型被視為獨立的拼寫修正模型,以字元的概率向量為輸入,輸出期望字元的概率分布。這樣的設計使得語言模型能夠從未標註的文本中獨立訓練,並且使模型更具解釋性和單位化,同時也能夠替換和靈活操作語言模型。
為了確保語言模型的獨立性,作者提出了阻斷輸入向量的梯度流(BGF),這樣可以防止視覺模型的梯度流進入語言模型,從而保證語言模型的獨立性。
這個策略的好處是可以引入自然語言處理(NLP)的技術,這裡可以隨意抽換成其他預訓練語言模型來提升效能。
-
雙向策略(Bidirectional Strategy):
語言模型的條件概率分為雙向和單向表示,分別為 和 。因此雙向模型能提供更豐富的語意資訊。
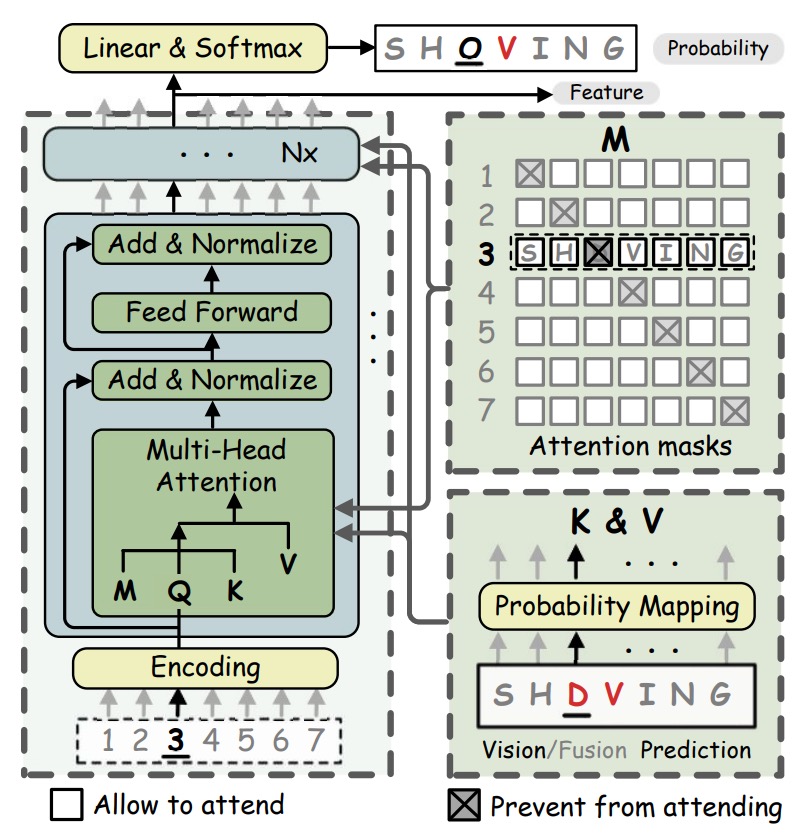
像是 BERT 的遮罩語言模型(Masked Language Model, MLM),用
[MASK]替換掉需要預測的字元 。但直接使用 MLM 效率極低,因為對每個字串都需重複 次遮罩操作來逐一預測字元。為提高效率,作者提出了雙向填字網路(BCN),用以取代需多次遮罩的 MLM,具更高的效率。BCN 採用傳統 Transformer 的 Decoder 架構,但有些地方不同:BCN 將字元向量直接輸入多頭注意力模組,而非輸入網路的第一層。為防止字元「看到自己」,多頭注意力模組中的注意力遮罩進行了特別設計,以避免字元間的信息洩露。
在 BCN 的多頭注意力塊中,遮罩矩陣 的構造如下:
,其中 表示字元 的機率分布, 為線性映射矩陣。
多頭注意力的計算公式為:
在此,表示第一層字元序列的位置編碼,而在後續層中則為上一層的輸出結果。 則來自字元機率 的線性映射。
BCN 通過設置類似填字(cloze)的注意力遮罩,能夠有效地學習更強的雙向表示,相較於單向模型更能捕捉語意的完整性。
提示這裡有幾個重點:
- 使用解碼器,但不用因果遮罩(causal mask),採用平行解碼。
- 不用
[MASK]遮罩,而是直接用對角線為 的遮罩矩陣,提高模型效率。
-
迭代策略(Iterative Strategy):
作者提出了迭代修正(Iterative Correction)的策略,來解決 Transformer 的並行預測中,來自視覺模型的噪聲輸入會降低預測信心的問題。在第一輪, 為視覺模型的概率預測;在後續迭代中, 來自前次融合模型的預測。
提示就是用多層 Transformer 的意思,作者稱這個為「迭代」修正。
-
融合(Fusion)
視覺模型訓練於圖像數據,而語言模型則訓練於文本數據,這兩者本質上是不同模態的信息。因此,為了讓視覺特徵與語言特徵相互對齊,融合過程需要一種機制來將這兩種模態的特徵進行結合。為實現最終的融合,作者使用了一種「門控機制」(gated mechanism),這一方法可以有效地平衡兩種模態特徵的影響,並決定最終的輸出特徵。
首先,對視覺特徵 和語言特徵 進行拼接(concatenate),並通過一個線性映射矩陣 將拼接後的特徵壓縮至與 和 相同的維度。
門控向量由以下公式計算得到:
其中, 表示 Sigmoid 函數,用於將門控向量 的值限制在 之間。這樣 可以用來控制視覺特徵與語言特徵在最終輸出中的權重。
最終的融合特徵 通過門控機制將 與 加權組合得到:
在此, 表示元素相乘(element-wise multiplication)。 控制了 和 的加權比例。例如,當 接近 1 時,視覺特徵 的影響更大;反之,當 接近 0 時,語言特徵 的影響更大。
-
監督學習
ABINet 的訓練採用端到端的多任務目標函數,通過結合視覺特徵、語言特徵及融合特徵的損失來進行模型優化。
具體的目標函數為:
其中:
- :視覺特徵 的交叉熵損失。
- :語言特徵 的交叉熵損失。
- :融合特徵 的交叉熵損失。
- 和 :分別表示在第 次迭代中的語言特徵損失與融合特徵損失。
- 和 :權衡係數,用於調整各個損失項的影響,確保視覺與語言特徵在訓練中的貢獻平衡。
實作細節
- 訓練資料集:使用兩個合成資料集 MJSynth (MJ)和 SynthText (ST)進行模型訓練。
- 測試資料集:包括六個標準基準資料集:ICDAR 2013 (IC13)、ICDAR 2015 (IC15)、IIIT 5K-Words (IIIT)、Street View Text (SVT)、Street View Text-Perspective (SVTP) 和 CUTE80 (CUTE)。
- 半監督方法的無標記資料:使用 Uber-Text 資料集(移除標籤)來評估半監督學習的效果。
- 模型設置:模型維度 設為 512,BCN 包含 4 層,每層有 8 個注意力頭。平衡因子 和 皆設為 1。
- 影像預處理:將影像縮放至 32×128,並進行資料增強(如幾何轉換、影像品質降低、顏色抖動等)。
- 訓練環境:使用 4 個 NVIDIA 1080Ti 顯卡,批次大小為 384。優化器採用 ADAM,初始學習率為 1e-4,並在第 6 個 epoch 後衰減至 1e-5。
討論
與其他方法的比較
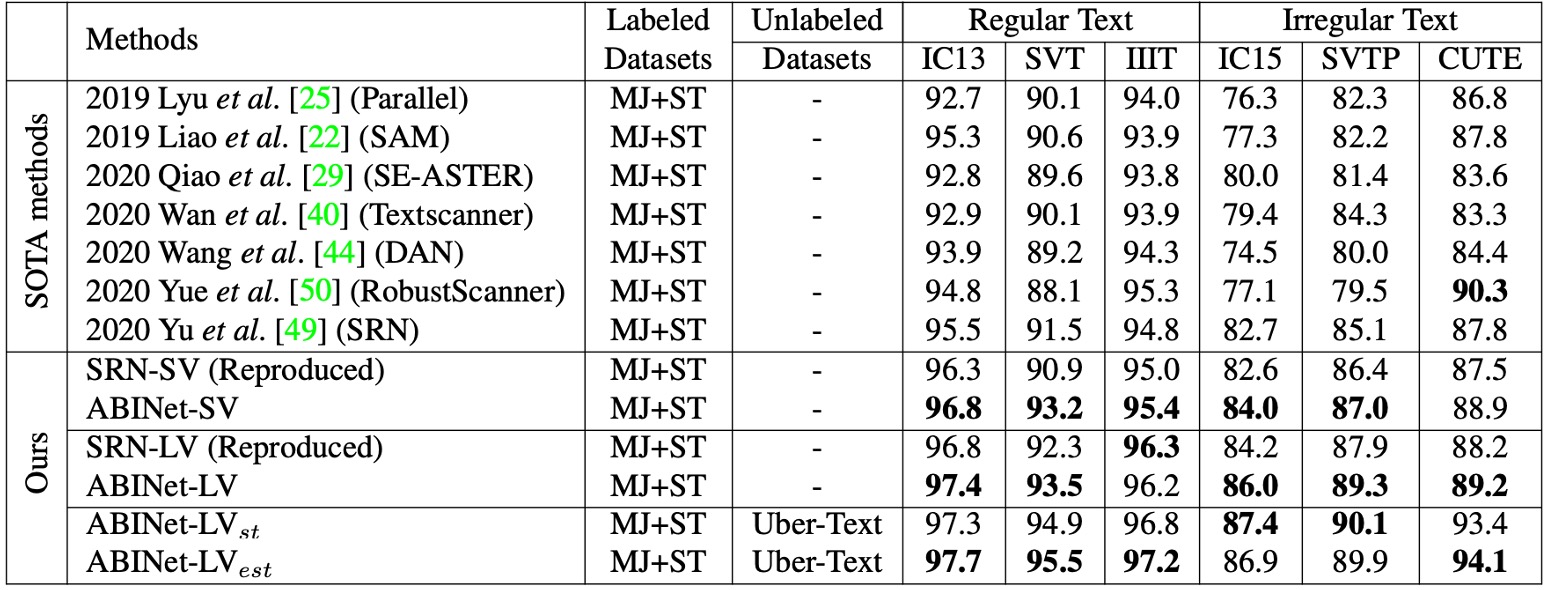
為了進行嚴格的公平比較,作者重現了 SOTA 算法 SRN,使其與 ABINet 共享相同的實驗配置。兩個重現版本的 SRN 分別使用不同的視覺模型(VM),且做了以下改進,包括替換 VM、移除多尺度訓練的副作用、應用學習率衰減等。相較於原始報告的 SRN 性能有所提升。
- ABINet-SV 與 SRN-SV 的比較:ABINet-SV 在多個資料集上優於 SRN-SV。
- ABINet-LV 的表現:當搭配更強的 VM 時,ABINet-LV 也顯示出優越的表現。
ABINet 在 MJ 和 ST 訓練的情況下,尤其在 SVT、SVTP 和 IC15 這些資料集上表現突出。這些資料集中含有大量的低品質影像(如噪聲和模糊影像),對於視覺模型來說辨識具有挑戰性,但 ABINet 藉由語言信息的補充顯著提升了辨識效果。
ABINet 能夠成功辨識不規則字體和非標準排版的文字,這主要得益於語言信息對視覺特徵的重要補充作用。即便沒有影像校正,ABINet 也能在 CUTE 資料集中取得次佳表現,顯示出在不規則文本上的良好辨識能力。
消融實驗-視覺模型
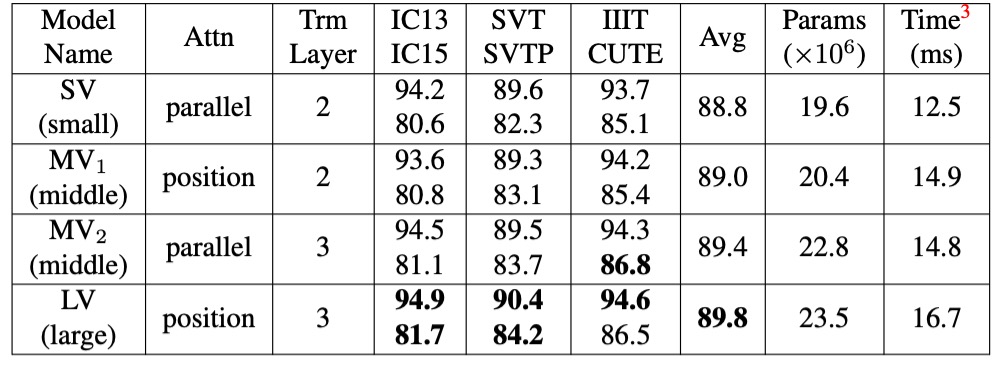
這裡主要比較了不同的特徵抽取和序列建模方法。
比起常見的平行注意力方法,作者所提出的「位置注意力」在表示鍵值向量方面更具表現力。
此外,升級視覺模型能顯著提高準確性,但代價是增加了參數和計算成本。或是可以通過在特徵抽取中使用位置注意力,以及在序列建模中使用更深層的 Transformer 來升級 VM。
消融實驗-語言模型
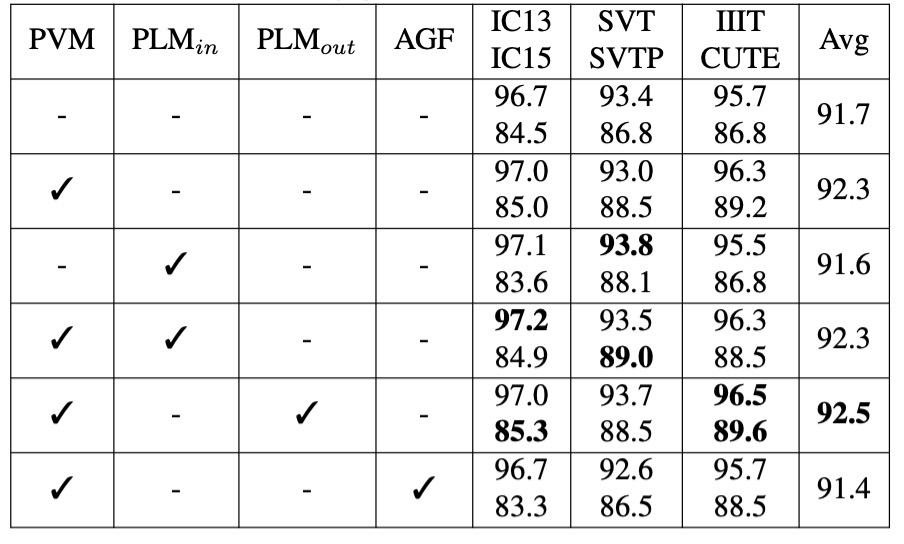
- PVM:表示在 MJ 和 ST 數據集上以監督學習的方式預訓練視覺模型(VM)。
- :表示在 MJ 和 ST 數據集上,以自我監督學習的方式預訓練語言模型(LM)。
- :表示在 WikiText-103 數據集上,以自我監督學習的方式預訓練語言模型。
- AGF(允許梯度流動):表示允許在視覺模型和語言模型之間進行梯度流動。
在監督學習的情境下預訓練 VM(PVM)可以平均提升準確率 0.6%-0.7%,顯示出視覺模型的預訓練能有效增強模型在視覺辨識上的表現。
的效果較小,這可能是由於這些數據集的文本數據在多樣性和語言結構上的不足,無法提供足夠豐富的語言信息。
的效果更佳,因為這個大型語料庫能夠顯著提升 LM 對文字上下文的理解能力,即便在高準確度的模型中仍能進一步提升性能。
啟用 AGF 會使模型平均準確率下降 0.9%,並導致訓練損失迅速下降到較低值,表明語言模型在訓練過程中可能出現過擬合。因此阻斷梯度流動可以讓語言模型獨立學習語言特徵,有助於模型的泛化性能。
消融實驗-雙向策略
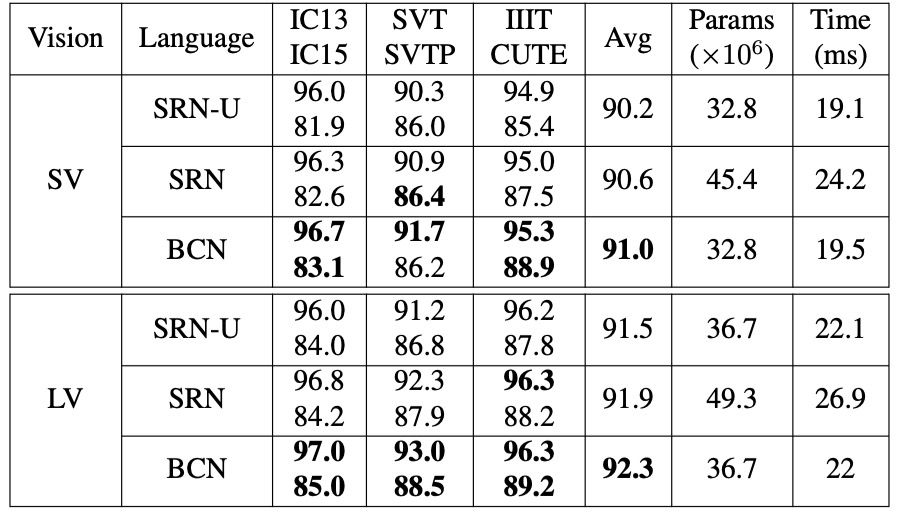
由於 BCN 是一種基於 Transformer 的變體,因此與其相似的 SRN 進行了比較。
為確保公平性,實驗在相同條件下進行,唯一區別在於所使用的網路結構。作者使用 SV 和 LV 作為視覺模型(VM)來驗證 BCN 在不同準確性水平下的效果。
- BCN vs. SRN-U:BCN 與 SRN 的單向版本(SRN-U)在參數數量和推理速度上相近,但 BCN 在不同的視覺模型下均具有競爭優勢,表現出更高的準確性。
- BCN vs. 雙向 SRN:相較於雙向集成的 SRN,BCN 在 IC15 和 CUTE 等具挑戰性的資料集上表現更佳。此外,配備 BCN 的 ABINet 在速度上比 SRN 快 20%-25%,對於大規模任務具有實際應用價值。
可視化分析
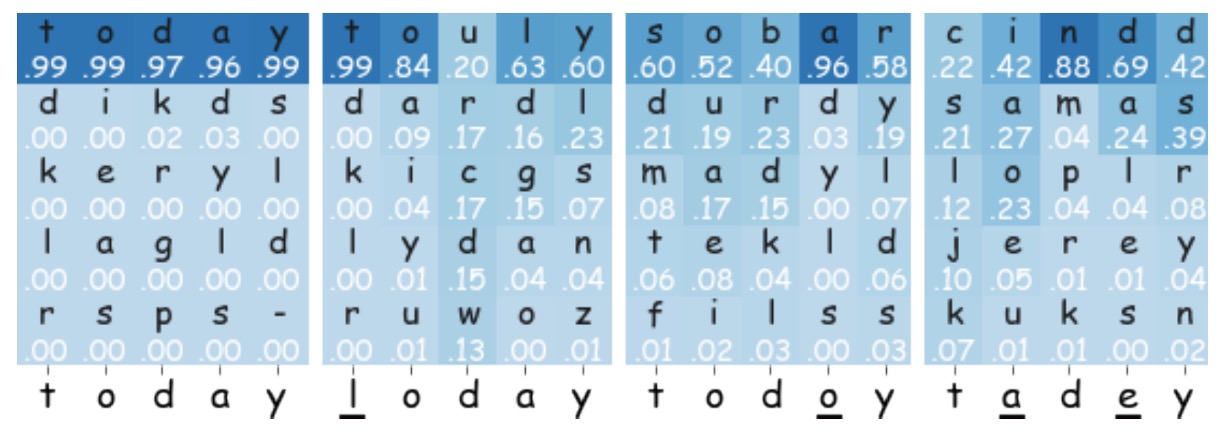
為理解 BCN 在 ABINet 中的工作方式,作者透過上圖展示了「today」一詞的前五大預測概率。
- 當輸入為「-oday」或「tod-y」時,BCN 能高置信度地預測出「t」和「a」,並對最終的融合預測有正面貢獻。
- 對於錯誤字符「l」和「o」,BCN 的信心較低,且對最終預測的影響較小。
- 若存在多個錯誤字符,則 BCN 難以恢復正確文本,因為缺乏足夠的上下文支持。
結論
本篇論文在文字辨識模型中引入了語言模型的分支。透過自主、雙向和迭代的設計,ABINet 能夠有效地提升文字辨識的準確性和泛化性。實驗結果表明,ABINet 在多個基準資料集上均取得了優異的表現,並且在不規則文本和低品質影像上具有顯著的優勢。
這其實和早期的文字辨識模型類似,在過去文字辨識模型輸出結果後,會經過一個「字典」進行最相近的文字匹配,只是後來在 CRNN 之後就愈來愈少有人這樣做。因為「字典」沒有辦法和模型一起訓練,而且受限於字典規模的大小,使文字輸出的多樣性受限。
繞了一圈,現在又回到了這樣的設計,不過這次是透過語言模型來幫助模型理解文字。
語言模型可以一起訓練,這是個顯著的優點,但是在過去使用「字典」的方式一樣,語言模型的訓練資料也是有限的,對於一些沒有語義的文字,例如車牌、文件流水號等,語言模型可能無法幫助模型理解。此外,對於一些帶有雙關或諧音的文字,可能會因為語言模型而導致誤判。
雖然融入語言模型有這些缺點,但這仍然是個非常重要的嘗試,在往後幾年間,文字辨識的領域有大量地研究都圍繞著語言模型展開,我們之後繼續關注這個領域的發展。