[22.03] CoCoOp

先看過影像再說
Conditional Prompt Learning for Vision-Language Models
作者發表了 CoOp 後,發現了點問題。
用來引導 VLM 的 token 和輸入影像是獨立的,也就是說,這些 token 在完成訓練之後就不會再去考慮影像的資訊。
如果你還沒讀過 CoOp 的話,可以參考我們之前寫的文章:
定義問題
由於視覺語言模型通常包含數億到數十億參數,全模型微調在資源需求上不切實際,且可能破壞模型的預訓練表示空間。於是在這之前,作者先提出了 CoOp,透過 Prompt learning 的方式,引導模型泛化到新任務上。
但是 CoOp 在學習上下文時,會過度擬合於特定訓練類別,導致在未見類別中準確率顯著下降。這樣的靜態設計缺乏泛化能力,難以處理更廣泛的場景。
一個直觀的想法是:我們可以讓模型在預測時,可以根據輸入的影像資訊,來調整 token 的內容。
解決問題
這一篇論文架構和上一代的 CoOp 幾乎一樣,我們就挑一些重要的部分來看。
模型架構
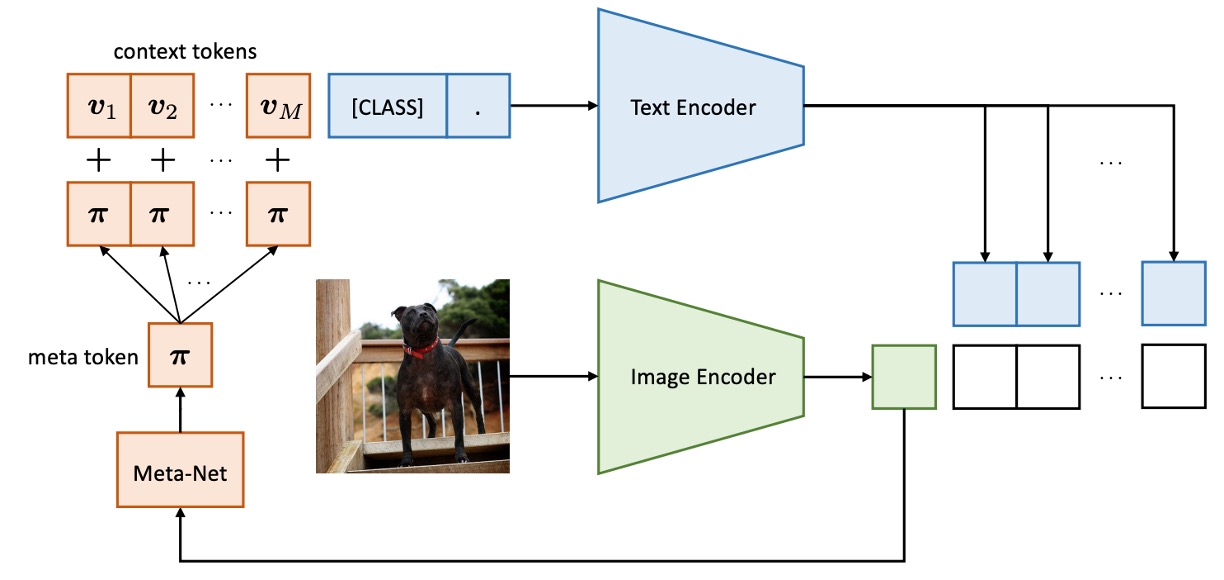
CoCoOp 和 CoOp 的差別在於多了一個分支,把影像的特徵導向到 token 的生成過程中。
在此之前,影像和文字的分支是獨立運作的,而這個架構則是讓影像的資訊可以影響到文字的生成。
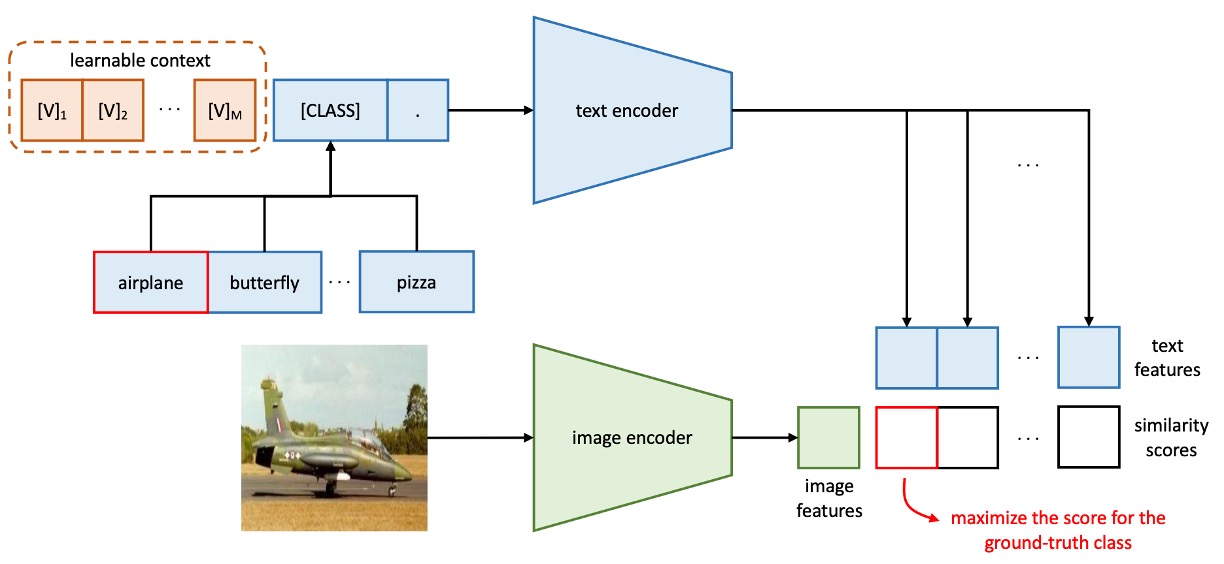
第一代的 CoOp 架構長這樣:
CoCoOp 的方法是引入一個輕量級神經網路(Meta-Net),結合可學習上下文向量生成輸入條件上下文。Meta-Net 為兩層瓶頸結構(Linear-ReLU-Linear),隱藏層將輸入維度壓縮至 16 倍,輸入為影像編碼器的輸出特徵。
條件上下文向量公式如下:
提示格式更新為 ,預測機率公式更新為:
在訓練過程中,上下文向量 與 Meta-Net 參數 同時進行優化,基礎模型(CLIP)保持凍結。
我們又輕鬆愉快地看完一篇論文!
討論
這裡主要看一下 CoCoOp 和 CoOp 的差異。
對於未見類別的泛化能力
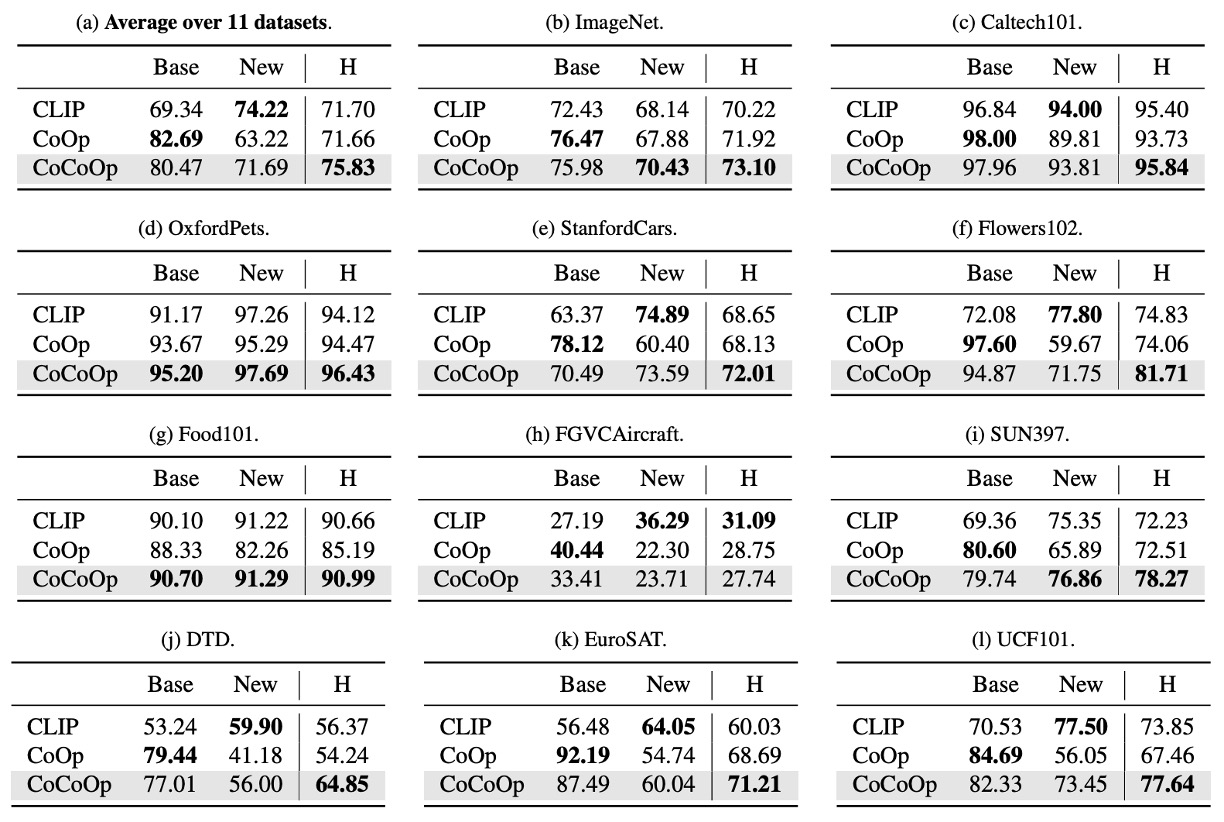
作者同樣在 11 個不同的資料集上進行實驗,在表格中,Base 表示基礎類別,New 表示未見類別。CoOp 是第一代的模型,CoCoOp 是這一篇的模型。
從上表中我們可以觀察到,雖然 CoOp 在基類別中的表現優於 CLIP,但在新類別的準確率顯著下降,平均準確率從基類別的 82.69% 下滑至新類別的 63.22%,產生近 20% 的差距。這可能是因為 CoOp 過度優化基類別,導致新類別表現不佳,這凸顯了提升學習型提示泛化能力的必要性。
CoCoOp 在新類別中的準確率提升至 71.69%,顯著縮小與手工提示間的差距。在 11 個數據集中,有 5 個數據集的準確率提升超過 10%,例如 ImageNet 準確率從 67.88% 提升至 70.43%,甚至超越 CLIP 的 68.14%。
相較於 CoOp,CoCoOp 的基類別準確率在部分數據集中略有下降,但 9 個下降案例中有 6 個數據集的降幅低於 3%,且新類別的顯著提升足以彌補基類別的損失。例如 StanfordCars 在基類別準確率下降 7.63% 的情況下,新類別準確率提升 13.19%,整體平均提升 5.56%。
增加參數量誰不會?
CoCoOp 引入 Meta-Net,增加了參數量,專業的你立刻就會問:
- 這個提升是否僅來自於增加的參數量?
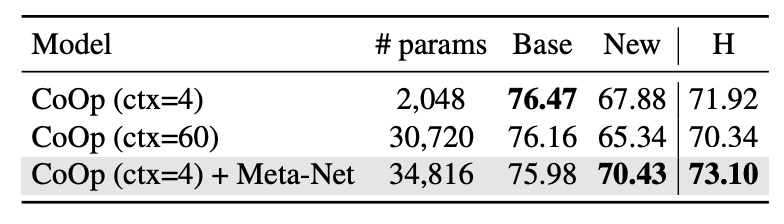
為此作者設計了一個實驗,移除 CoCoOp 的 Meta-Net,將 CoOp 的上下文數量增加至與 CoCoOp 參數量相近的最大值。
根據上表結果顯示,比較 CoOp (ctx=60) 和 CoOp (ctx=4) + Meta-Net 在接近參數量的情況下,CoOp (ctx=60) 並沒有提升對於新類別的泛化能力,反而還降低了 2.54%,這再次證明了作者對於 CoOp 過度擬合的基礎類別的觀點。
因此 CoCoOp 的改進來自條件上下文設計,而非單純的參數增長。
結論
CoCoOp 基於條件提示的設計,解決靜態提示的泛化問題,並且在多種場景中表現卓越,像是跨數據集的提示遷移、域泛化場景等。
作者在最後提到,CoCoOp 的訓練效率顯著低於 CoOp,而且在 11 個數據集中,有 7 個數據集的未見類別性能仍低於 CLIP,顯示學習型提示與手工提示的性能差距尚未完全彌合,問題遠遠還沒到結束的時候。
在 CLIP 的影像分支和文字分支的中間,加入更多華麗的 Prompt learning 的工程,可說是這幾年的熱門研究方向之一,有時間我們再來彙整一下。