[10.09] SLRBD

沈默的反射光
Face Liveness Detection from A Single Image with Sparse Low Rank Bilinear Discriminative Model
這次我們要來深度走訪活體辨識的技術脈絡。
在一開始,我們選了幾篇論文作為該領域發展前期的重點。
定義問題
活體辨識的議題早在 2010 年前就已經有很多研究,在當時的方法使用臉部運動(如眨眼、微小臉部變化)或皮膚質感、深度資訊等特徵來辨識活體。
但,只要對方知道你是採用何種算法,就可以被針對性的破解。像是臉部運動的偵測可以被短片播放,照片晃動或雙照片仿真的方式欺騙。
那如果引入 3D 相機或是熱成像儀呢?
那就更沒用了。
我們出門可以隨身帶手機,但絕不會吃飽撐著帶個熱成像儀出門,只為了不知道在什麼時候用它來證明自己是活體。
因此本篇論文的作者提出要透過「一張影像」就認出對方是否為活人,不假其他外力。
舉例來說,參考下圖,哪幾張是拍攝人臉照片(翻拍)?哪幾張是拍攝真實的人臉?
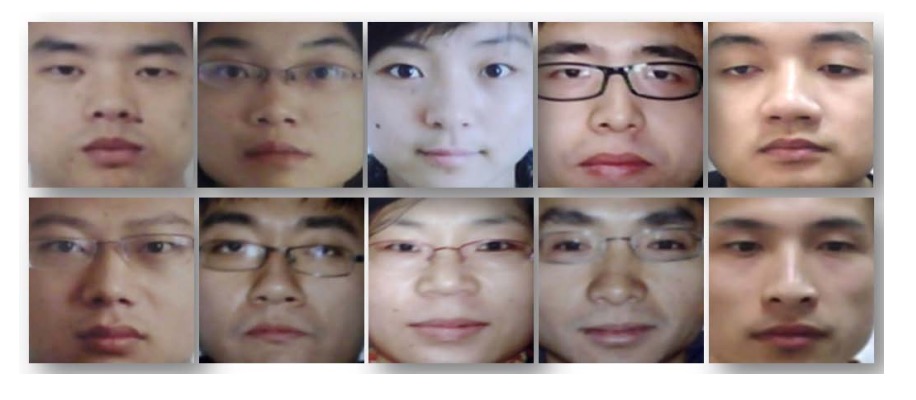
答案是:從右邊數來第一個 Column 是真的,其他都是照片翻拍。
什麼!你說你肉眼根本看不出來?
說得對,這就是問題。
解決問題
在當時,最流行的影像特徵擷取方法是主成分分析(PCA),但作者發現,透過 PCA 所得到的活體與冒充影像的特徵分佈存在大量重疊,無法有效區分兩者。
PCA 的概念是抽取影像中最具代表性的特徵,所以我們可以想想在人臉圖像中最明顯的特徵是什麼?對,就是人臉本身。
但這也正是問題所在。PCA 所提取的特徵往往聚焦在人臉的整體結構,而非細部的反射與照明差異,因此無法有效區分活體與冒充影像。
為了解決這個問題,作者改採「Lambertian 反射模型」作為分析基礎,期望從光照與表面交互的角度來尋找判別依據,並且將這個問題視為一個「二元分類」的問題,簡單來說,就是將影像分為「活體」或「冒充」兩類。
Lambertian 反射模型是一種描述表面如何散射入射光的數學模型,假設表面為理想的漫反射體。這代表表面會將光線均勻地向所有方向散射,且觀察亮度與觀察角度無關。
這種特性來自於 Lambert 的餘弦定律,其基本公式為:
其中:
- :影像中位置 的亮度;
- :相機的光響應因子,通常視為常數;
- :反射係數,代表表面的漫反射特性;
- :光源強度;
- :光線與表面法向量之夾角的餘弦值,可寫作 。
根據此模型,當光線與表面法向夾角越小( 趨近 1),反射強度越高;反之,夾角越大( 趨近 0),反射強度就越低。這種光照反射的變化,對於描述如人體皮膚、紙張等非鏡面反射物體而言非常貼切。
進一步地,作者將此模型應用於活體偵測的場景,針對在相同照明條件下取得的兩張影像:
- 活體影像
- 冒充影像
根據 Lambertian 模型,兩者皆可表示為:
假設 為常數,則:
進一步拆解為:
其中 ,將影像拆解為反射成分 與照明成分 ,突顯了兩者在活體與冒充之間的區分潛力。
為了估計照明成分 ,作者採用 Logarithmic Total Variation (LTV) 平滑方法:
其中 預設為 0.5。
接著,運用 Land’s Retinex 公式計算反射成分:
這樣的分解讓我們觀察到:活體影像的 含有更多的表面法向資訊,而照片影像的 相對平滑,說明其光照與結構細節較為單一。這是因為冒充影像經歷相機拍攝與列印過程後,影像品質與細節皆有所損失。
為了強化這些差異,作者進一步使用 DoG 濾波器(差分高斯)提取影像中的高-中頻區域變異:
- 內部高斯標準差 為 0.5
- 外部高斯標準差 為 1.0
經過 DoG 處理後,活體影像的高頻成分(尤其水平方向)更為明顯,而冒充影像的中頻部分則顯得失真與模糊。
此外,在相同照明條件下,照明成分比值 主要受表面法向 與 所影響,這意味著可以透過「真實用戶的參考影像」來協助辨識冒充攻擊。
針對不同照明條件,作者提出以下處理策略:
- 使用奇異值分解(SVD)從訓練資料中學得 個常見光照方向,構成光照矩陣 ;
- 將任意照明影像 投影到該光照空間,求得重構係數 ,以此作為分類器的輸入特徵。
但因 LTV 分解有可能將部分紋理細節滲入 ,導致其分布變得非線性,為避免誤差累積,作者選擇直接從潛在樣本學習分類器,而非進行進一步手工特徵設計。
分類器設計方面:
- 稀疏邏輯斯迴歸: 將標準邏輯斯迴歸加入 -正則化,控制高維樣本下的過擬合問題。
- 稀疏低秩雙線性邏輯斯迴歸: 直接操作二維影像結構,學習低秩投影矩陣 ,在 與 上施加 -正則化,使部分列向量歸零,達成稀疏與低秩性,透過交替坐標下降法優化,直至收斂。
最終,再透過核映射 將原始樣本轉換到高維特徵空間,並套用上述稀疏分類模型進行活體偵測。
此方法為一種非參數機率模型,雖然參數數量隨樣本增加而上升,但透過 正則化能有效控制其複雜度,且整體計算效能優於其他如 pSVM、RVM、IVM 等常見模型。
「非參數機率模型」(non-parametric probabilistic model)是一類不對模型的參數數量進行固定假設的機器學習方法。
這並不代表這些模型「沒有參數」,而是指模型的複雜度(如參數數量)會隨著資料量的增加而自動調整,而非事先決定一個固定的結構或大小。
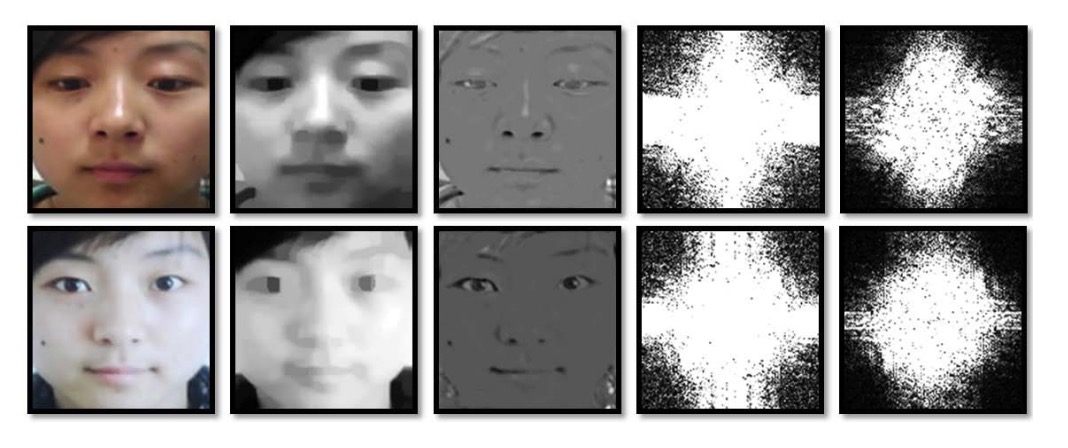
公式看了這麼多,作者也貼心地用一張範例圖像來說明整個模型架構。
上圖展示了針對「真實使用者影像」(上排)與「冒充影像」(下排)所推導出的潛在樣本,透過不同影像處理與頻譜分析技術,提取有助於區分兩者的關鍵特徵。
我們逐一說明每個欄位所代表的意義:
- Column 1:這是原始影像,上排是真實使用者影像,下排為冒充影像(照片翻拍)。
- Column 2:這是 LTV 估計的照明影像 (µ Image),顯示經 LTV 方法估計出的照明分布。真實影像中,µ 通常含有更多曲面與法向變化資訊;而冒充影像則顯得平滑,缺乏立體感。
- Column 3:這是 LTV 估計的反射影像 (ρ Image),捕捉物體本身的材質與紋理,與光照變化無關。真實人臉與冒充影像的反射圖,在細節與紋理上常有顯著差異。
- Column 4:這是原始影像的傅立葉頻譜,中心化的頻譜揭示全域空間頻率分佈,可反映出影像的細節與紋理豐富度。
- Column 5:這是使用 DoG 過濾後影像的中心化傅立葉頻譜,強調高-中頻資訊,突顯因立體結構與材質差異而產生的空間細節,為分類提供關鍵依據。
訓練與驗證資料集

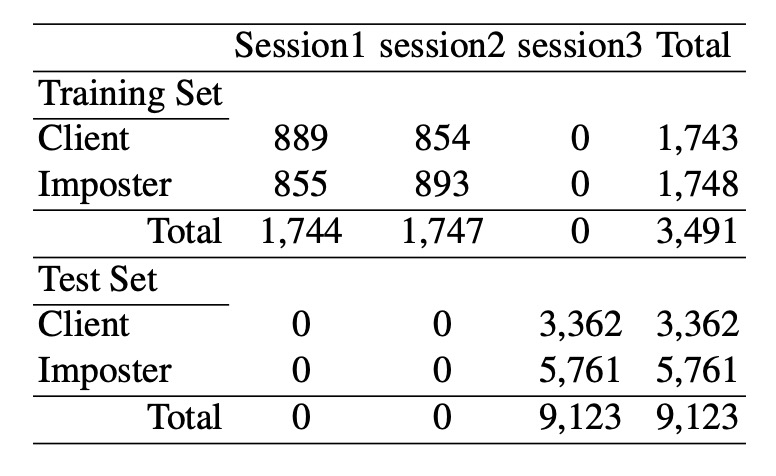
利用普通廉價網路攝影機於三次不同拍攝會議中採集資料,每次間隔約兩週,環境與光照條件各異。共 15 位受試者參與,每次皆捕捉活體影像(500 張、20fps)及相對應的照片影像。
照片影像先用高畫質相機拍攝,再以不同尺寸與印刷方式(相紙與 A4 彩色列印)製作,模擬各類攻擊情境。訓練集來自前兩次拍攝(活體與冒充影像分別約 1743 與 1748 張),測試集來自第三次拍攝(分別 3362 張活體與 5761 張冒充影像),且部分受試者僅出現在測試集中。
所有影像經過人臉偵測、眼部定位、幾何標準化、裁切至 64×64 像素及轉換成灰階圖,詳細資料配置如下表:
討論
SLR 性能評估
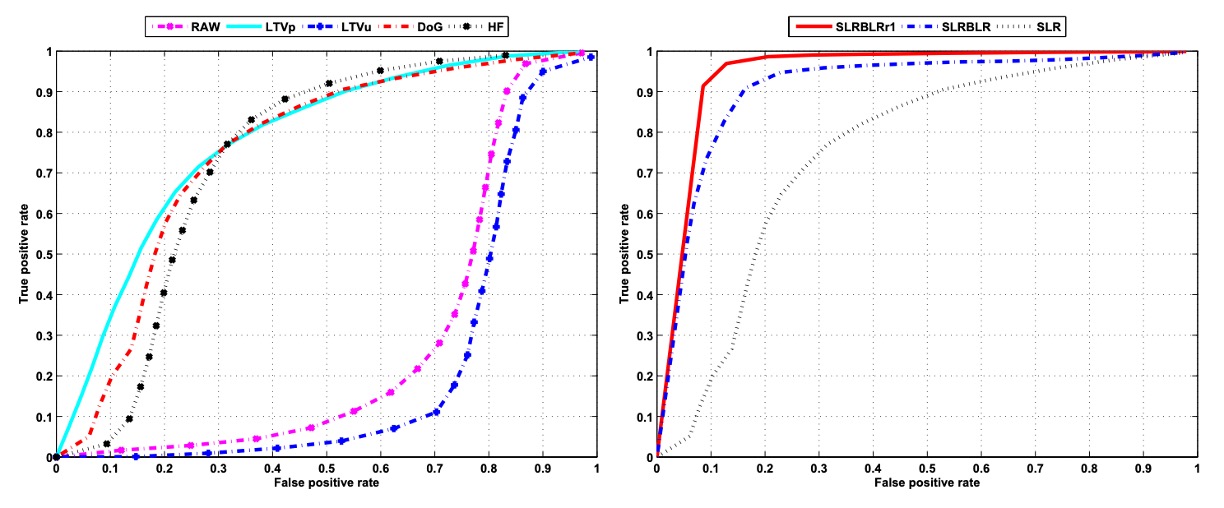
為驗證前述特徵與模型在實際應用中的效能,作者首先使用稀疏線性邏輯斯迴歸(SLR)對不同影像特徵進行辨識實驗。上圖左側展示了各特徵類型在辨識任務中的表現,每條線對應一種特徵輸入,結果如下:
- RAW(原始灰階影像): 效能表現最差,顯示直接使用原始像素值作為輸入無法有效分辨活體與冒充影像。
- LTVu(由 LTV 分解所得之照明影像): 同樣表現不佳。雖然包含光照資訊,但其非線性特性不利於線性分類器進行有效判別。
- LTVp(由 LTV 分解所得之反射影像): 表現明顯提升,AUC 約 0.78,顯示反射特徵能更有效捕捉物體材質與紋理差異。
- DoG(差分高斯過濾影像): 亦展現不錯的效果,AUC 約 0.75。中頻特徵的強調能提升影像在特徵空間中的可分性。
- HF(高頻成分的一部分): 表現相對較差,AUC 僅約 0.69,說明高頻成分雖能提取細節,但也容易受噪聲與失真影響,導致穩定性不足。
綜上所述,LTVp 與 DoG 特徵在活體與冒充影像的辨識上皆優於 RAW 與 LTVu,進一步佐證了反射與中頻特徵在該任務中的判別潛力。相比之下,僅取高頻資訊雖能捕捉部分邊緣特徵,但由於其不穩定性,使得整體效能仍落後於 LTVp 與 DoG。因此,後續實驗不再採用原始影像作為輸入特徵。
進一步地,作者分析了在使用相同特徵(此處為 DoG 過濾影像)下,不同稀疏線性分類模型的效能差異,如圖右所示:
- 標準稀疏邏輯斯迴歸(SLR): 在 DoG 影像上得到 AUC 約 0.75,作為基準。
- 稀疏低秩雙線性邏輯斯迴歸(SLRBLR): 引入影像空間結構與低秩假設後,AUC 明顯提升至約 0.92。
- SLRBLR 的特例 SLRBLRr1(rank=1): 更進一步限制投影矩陣的秩為 1,AUC 高達 0.95,顯示極低秩的投影仍能保留最關鍵的區辨資訊,且效果最佳。
這些結果顯示,將傳統的 SLR 擴展為雙線性形式,並結合稀疏與低秩正則化,可以有效挖掘影像中潛藏的空間結構,大幅提升分類能力。特別是 SLRBLRr1,透過極簡化的低秩投影矩陣,反而能更聚焦於最具代表性的變異方向,展現強大的辨識能力。
從特徵設計的角度來看,反射特徵(LTVp)與中頻特徵(DoG)能顯著提升樣本間的區辨度;從分類模型的角度看,低秩雙線性模型的引入進一步拓展了線性分類器的表現上限。
藉由這樣的設計,模型效能從 AUC 0.75 躍升至最高 0.95,證明該方法在活體辨識任務中具有強大的實用潛力。
分類器性能評估
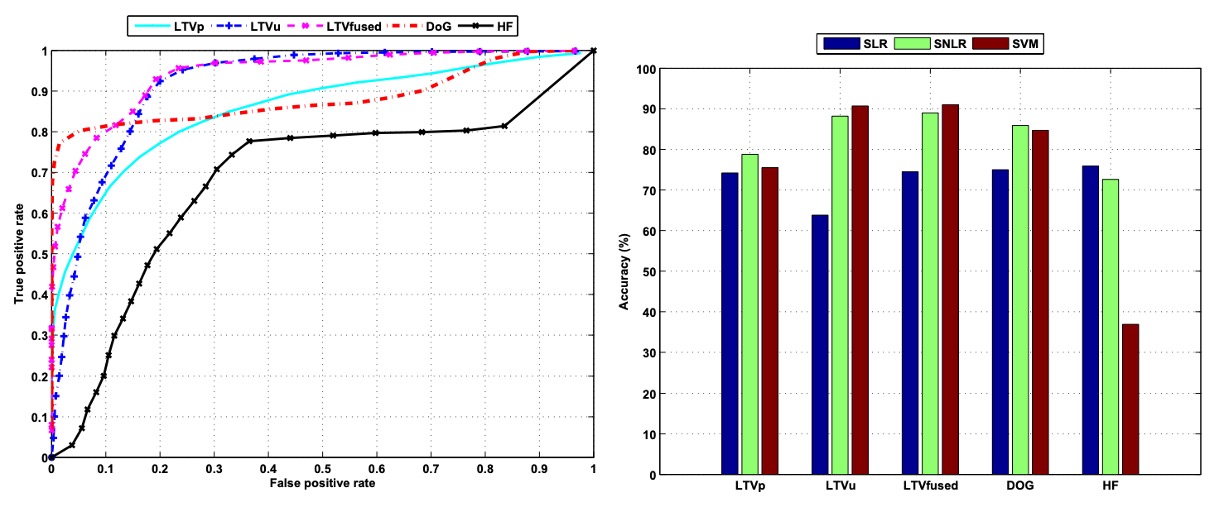
為進一步提升辨識效能,作者將原本的線性分類模型擴展為非線性稀疏邏輯斯迴歸(SNLR),上圖左側即為其在不同輸入特徵下的偵測效能。透過引入非線性決策邊界,整體偵測能力有了顯著提升。
以 LTV 分解所獲得的照明成分(LTVu)為例,在傳統線性分類器中其 AUC 僅約 0.22,幾乎不具辨識能力;但經 SNLR 處理後,AUC 大幅提升至 0.92,充分說明該特徵具有潛在的分類價值,只是需要更具表現力的非線性模型來發掘。
此外,當反射成分(LTVp)與照明成分(LTVu)結合作為輸入時,分類性能進一步提升,AUC 達到 0.94,顯示這兩種特徵在資訊上具有互補性,結合後能加強模型的判別能力。
在所有特徵中,DoG 過濾後的影像在 ROC 曲線上的表現最為亮眼,其曲線呈現快速上升趨勢,表示模型在維持極低假陽性率的情況下,依然能達成高真正率,這對於實際應用場景(如人臉驗證系統)尤其重要。
上圖右側進一步比較了三種分類器模型在不同特徵輸入下的整體分類準確率:包含稀疏線性邏輯斯迴歸(SLR)、稀疏非線性邏輯斯迴歸(SNLR)與機率型支持向量機(SVM)。分類結果基於 9,123 張測試影像,透過適當閾值設定,計算其正確分類的比例。
結果顯示,DoG 特徵在各模型中皆展現穩定且優異的表現。其能有效去除高頻雜訊與低頻干擾,保留中頻的結構資訊,對活體與冒充影像的區分效果尤其顯著。相比之下,僅使用高頻特徵(HF)則因容易受到噪聲與邊緣偽影影響,分類準確率相對較低。
傳統傅立葉頻譜分析雖能提取全域頻率資訊,但其分類準確率約為 76.7%,比 DoG 特徵低約 10%,顯示其穩定性與區辨能力均較不足。而 LTV 分解所獲得的反射(LTVp)與照明(LTVu)影像,經與非線性模型結合後,也展現出良好的輔助效果,進一步提升整體系統辨識性能。
綜合以上分析,不論是在特徵提取或模型設計層面,DoG 特徵與非線性稀疏分類器的結合都為活體偵測任務提供了顯著效能提升,展現極高的實用潛力與拓展空間。
結論
本論文透過物理反射模型對影像中固有的表面特性進行解析,強調從影像中萃取本質資訊以區分真人與照片的重要性,並為後續多模態融合與跨域學習方法建立了堅實的理論基礎。
在技術實作層面,作者提出一種「非侵入、即時、且無需額外硬體設備」的活體檢測方法,不僅具備實用性,也提供了在現有系統中可直接部署的解決方案。
雖然當今活體偵測技術在性能與穩健性方面已大幅超越早期方法,但該論文所提出的影像分解策略與特徵學習觀點,仍被視為理解與優化活體檢測系統的重要依據。其核心思想在當代多模態融合、跨光照條件適應等前沿議題中,依然持續發揮著深遠的影響與啟發作用。