[20.10] ViT

新世界拓荒者
An Image is Worth 16x16 Words: Transformers for Image Recognition at Scale
在 2017 年,Transformer 模型提出後,在 NLP 領域內掀起一陣狂潮,霎時間便烽火連天。
這陣風吹了三年,終於把硝煙也吹進了電腦視覺領域。
定義問題
在前幾年的嘗試中,許多研究嘗試將注意力機制與卷積網路結合使用。
或是在保持卷積網路的結構不變的前提下,替換掉某些部分。
這些研究都暗示著 Transformer 架構沒有辦法直接生搬硬套到圖像領域。
本篇論文的作者認為:
- 那只是你們的方法不對!
我們完全可以捨棄卷積,直接用 Transformer 來處理圖像。
圖像這件事,不過就是 16 x 16 的文字集合罷了!
解決問題
模型架構
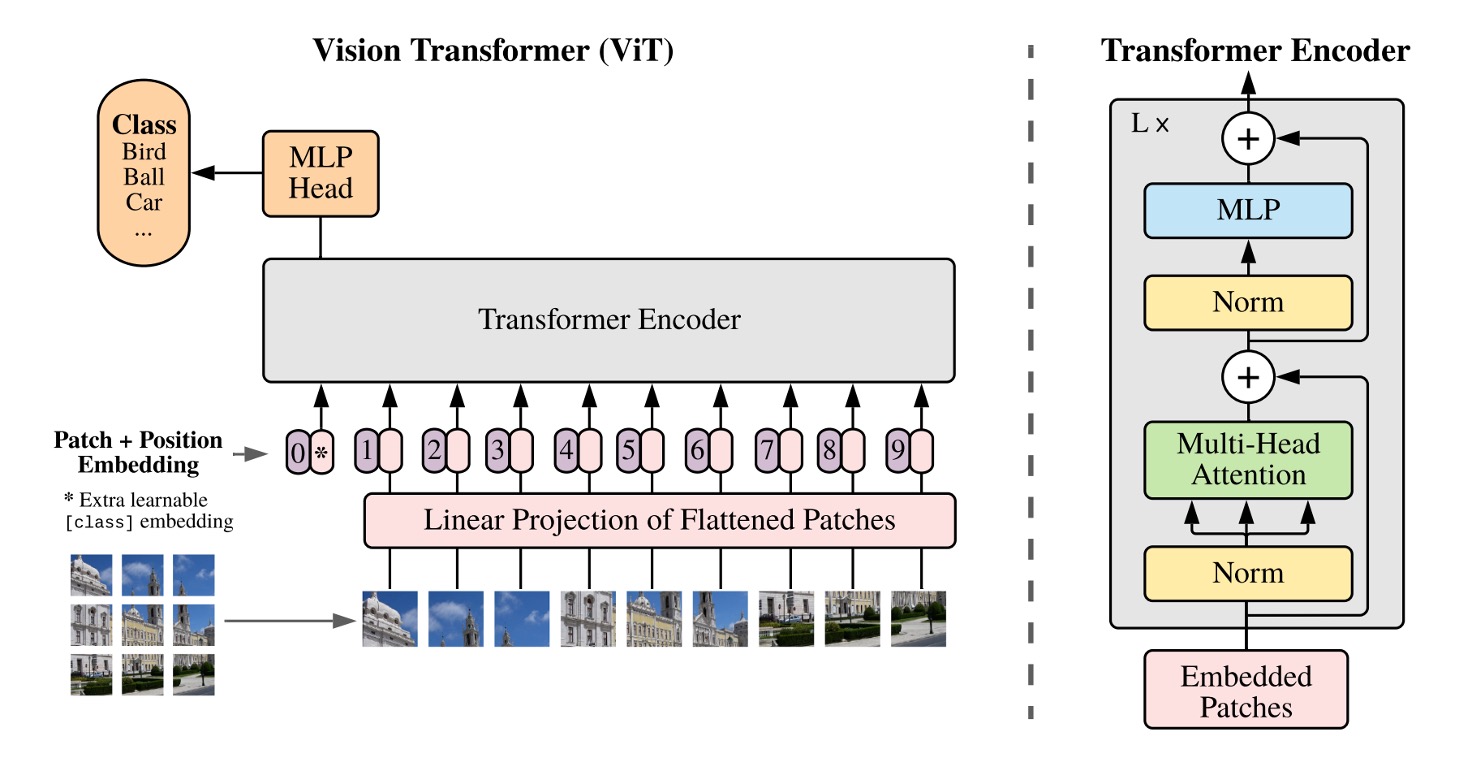
說到 Transformer,我們都很熟悉。
把文字經過 Embedding 後,排成一個序列,然後丟進 Encoder,再經過 Decoder,最後輸出結果。
當我們想在圖像上套用這個架構,首先要思考的問題是:
- 該怎麼把圖像轉換成文字序列?
在這裡,作者提出的方法是:切塊吧!
Patchify
給定一張圖像,假設其尺寸為 224 x 224,試想該如何把他們切成一塊一塊的區域呢?
手動切嗎?當然不是!
這裡作者引入一個 Conv2d 的操作,就完成了這個任務。
直接來實作一下:
import torch
import torch.nn as nn
# 假設圖像尺寸為 224 x 224
dummy_img = torch.randn(1, 3, 224, 224)
# 切塊
patch_size = 16
# 編碼維度
embed_dim = 768
# Patchify
emb_layer = nn.Conv2d(3, embed_dim, kernel_size=patch_size, stride=patch_size)
# 切塊後的結果:
# input.shape = (1, 3, 224, 224)
# tokens.shape = (1, 768, 14, 14)
tokens = emb_layer(dummy_img)
這裡我們設定切塊圖像的尺寸為 16 x 16,並且設定編碼維度為 768。
透過卷積的 stride 進行不重疊滑動視窗,就可以將 224 x 224 的圖像切成 14 x 14 塊。
在原本的 Transformer 中,我們會將文字序列的每個 token 進行 Embedding,這裡也是一樣的。將每個切塊的圖像進行 Embedding,意思就是把每個 16 x 16 x 3 的區域轉換經過線性轉換,投影到 768 維的向量。
最後我們把這些切塊的結果展平,變成一個序列:
tokens = tokens.flatten(2) # (1, 768, 14, 14) -> (1, 768, 196)
tokens = tokens.permute(2, 0, 1) # (1, 768, 196) -> (196, 1, 768)
在 Transformer encoder 中,輸入的第一個維度是序列的長度,第二個維度是 batch size,第三個維度是特徵編碼長度。
經過上面的操作,我們就得到可以丟進 Transformer 的輸入序列了。
然後呢?
然後就結束了。
之後就跟 NLP 的 Transformer 一樣,想怎樣就怎樣。
卡!不對,不能這麼早結束!
*
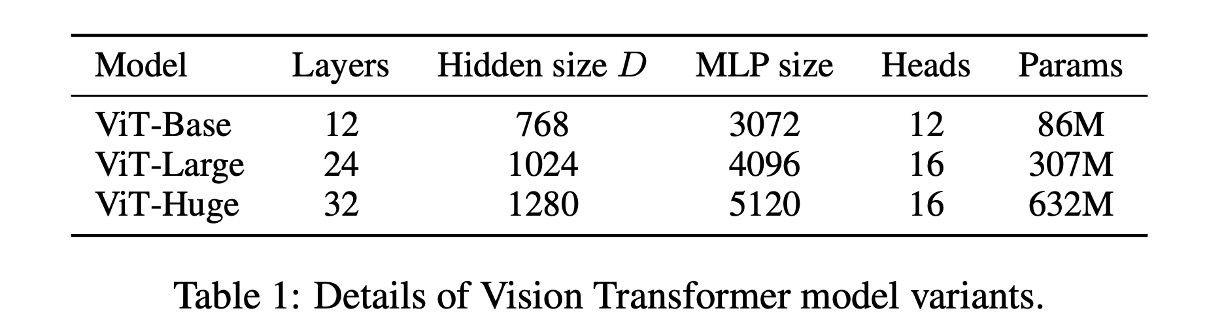
下表為 ViT 的參數設定:
沒有歸納偏差
在 Transformer 的架構中,並沒有對於圖片的歸納偏差(inductive bias)。
在 ViT 中,只有 MLP 層是局部和平移不變的,同時自注意力機制是全局的,二維鄰域的結構關係非常少。
因此模型必須重頭開始學習並理解:什麼是圖像?所謂圖像的特徵又是什麼?
這也是為什麼從 Transformer 到 ViT 的時間需要這麼長的原因,大部分的早期研究都沒有做出比卷積網路更好的結果,故而不了了之。
卷積網路的歸納偏差是什麼?
卷積網路的歸納偏差是指,卷積網路在設計上,對於圖像的平移不變性和局部性有著很強的偏好。這種偏好是通過卷積核的設計實現的,卷積核的共享權重和局部感受野,使得卷積網路能夠捕捉到圖像的局部特徵,並且對於圖像的平移不變性有著很好的性能,並且容易泛化到其他圖像辨識任務上。
訓練資料必須大
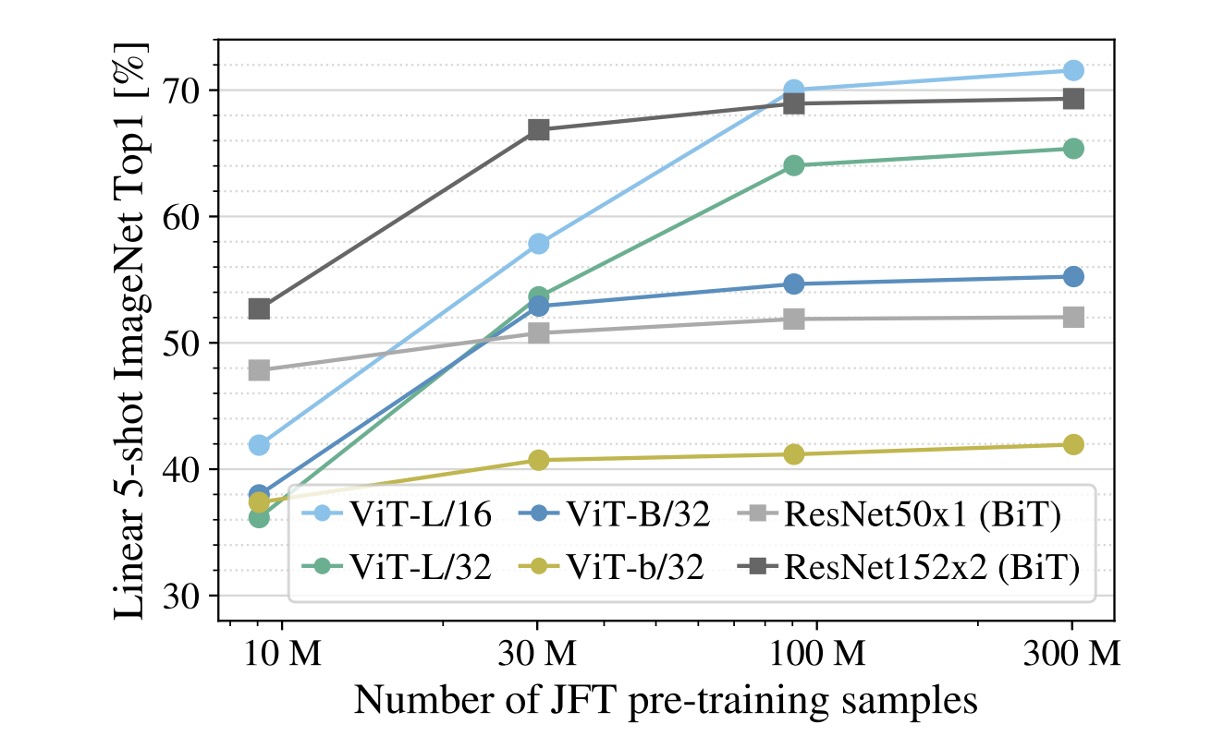
從實驗中可以看到,如果訓練資料的規模不夠大,ViT 的效果會比卷積網路差很多。
上圖中,灰色的線表示 ResNet50x1 (BiT) 和 ResNet152x2 (BiT) 的結果,而其他顏色的線則是 ViT 的結果。底下橫軸是訓練資料量,當資料量來到 300M 時,ViT 的效果終於超越卷積網路。
作者認為:
- 在小資料集上,卷積網路的歸納偏差是很重要的。
- 在大資料集上,直接從資料中學習相關的模式就足夠了!
ViT 模型的閱讀方式:
- ViT-L/16:Large 模型,16 x 16 的切塊
- ViT-L/32:Large 模型,32 x 32 的切塊
切塊的大小愈小,編碼的解析度愈高,模型的效果愈好,但是計算量也愈大,呈平方關係增長。
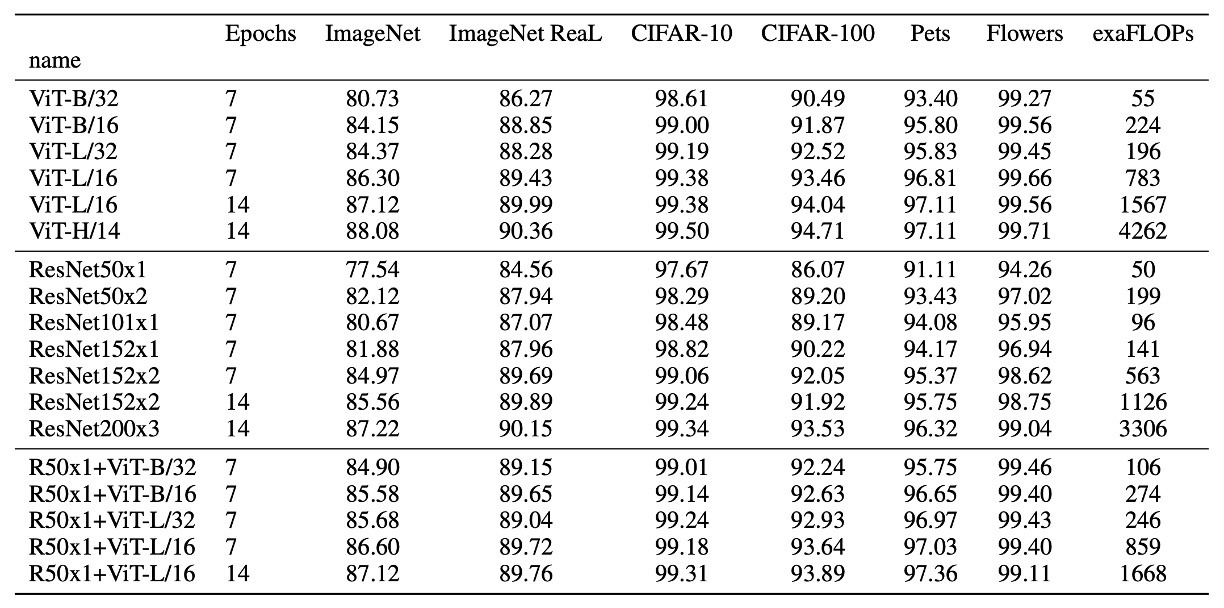
還能再更大
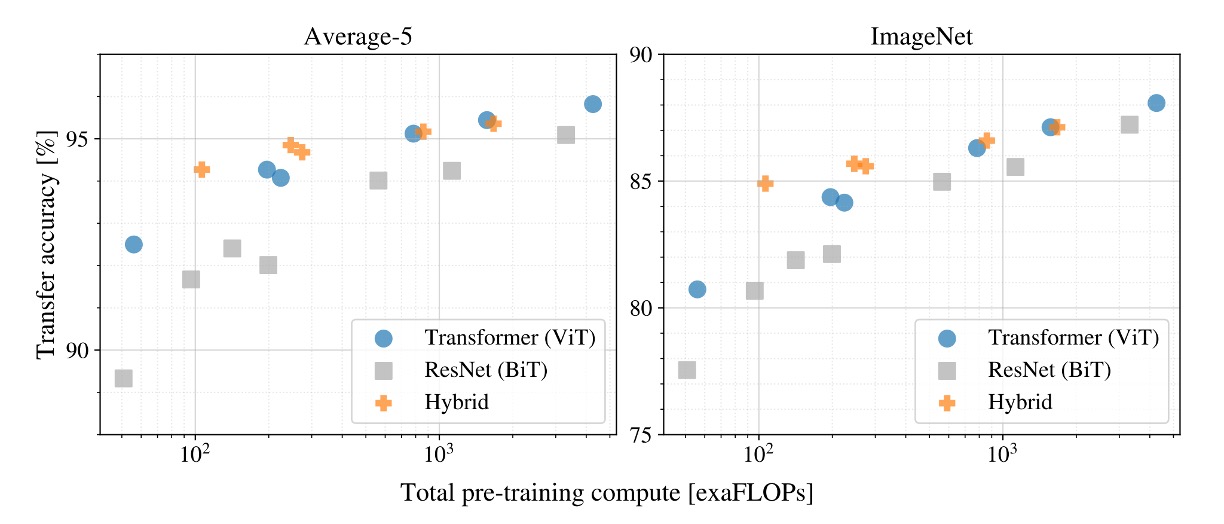
如果一直 Train 下去,會怎樣?
在這個實驗中,作者使用了 3 個不同的模型:
- ViT
- ResNet
- Hybrid Model
實驗結果顯示,當訓練資料量足夠大時,ViT 的效果會超越 ResNet。
同時 Hybrid Model 在小模型上的效果會比 ViT 稍微好一點,但是當模型變大時,這種差異就消失了。
最後,ViT 在嘗試的範圍內並未飽和,這其中顯然還有很多潛力可以挖掘。
人們可能會期望卷積局部特徵處理能夠幫助任何大小的 ViT,但是沒有。
討論
ViT 看到了什麼?
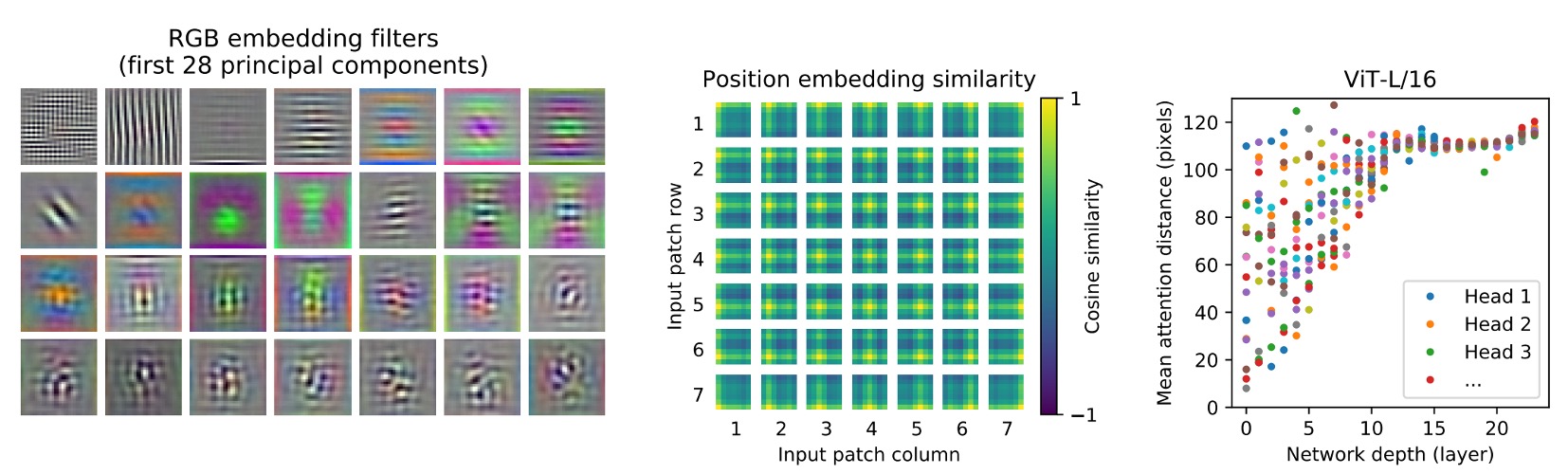
作者將第一層將影像片段(patches)投影到低維空間,取出前 28 個主成份。
-
Self-attention(上圖左)
ViT 通過自我注意力機制,能夠整合影像的整體信息,即使在最低層也是如此。
注意力權重用於計算影像空間中信息整合的平均距離,這類似於 CNN 中的感受野大小。
模型展示了在最低層中對大部分影像的關注,說明其全局整合信息的能力。而其他注意力頭在低層的關注則更局部化。
-
Position Embeddings(上圖中)
空間上較近的區塊具有相似的 embeddings,表示這些 embeddings 能夠編碼影像內部各區塊之間的距離關係。
從 embeddings 中看到看到行列結構,對於較大的網格,有時觀察到顯著的正弦結構。
-
注意力距離(上圖右)
這種「注意力距離」類似於 CNN 中的感受野大小。
較低層中各個頭部的平均注意力距離變化很大,有些頭部關注影像的大部分,而其他頭部則專注於查詢位置或附近的小區域。
隨著深度的增加,所有頭部的注意力距離都會增加。 在網路的後半部分,大多數頭部廣泛帶有長注意力距離,這表明了模型在這些層中更多地關注全局信息。
用 [CLS] 預測還是用 GAP 預測?
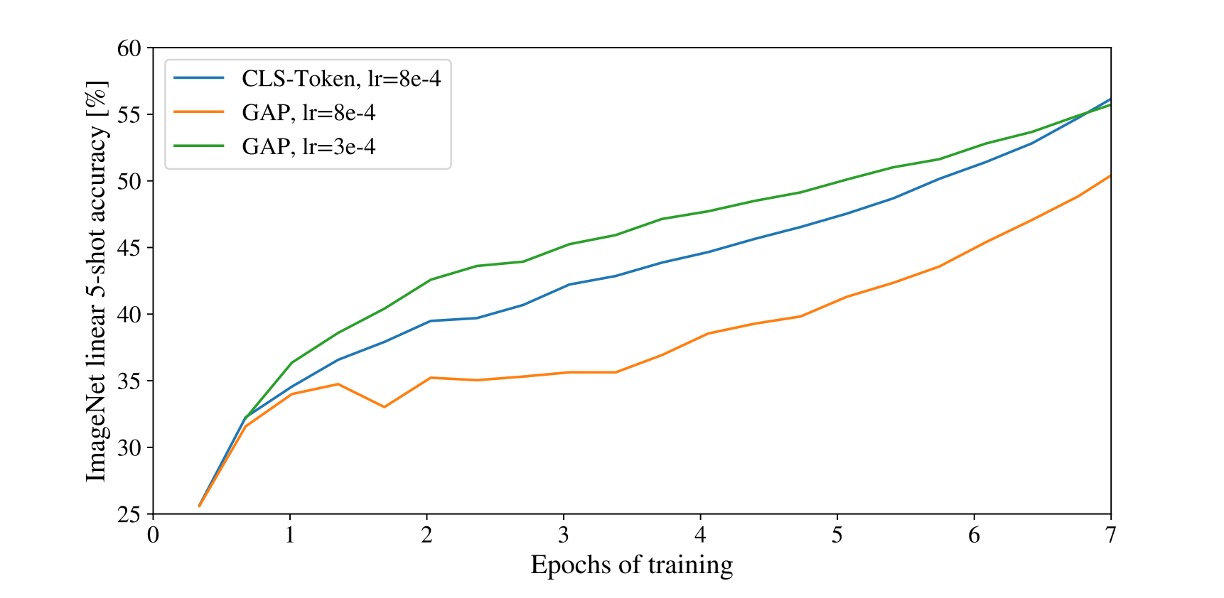
在本篇論文中,作者使用了兩種不同的方法來進行分類任務:
-
[CLS] 預測
這是 NLP 中常見的做法,將序列的第一個 token 作為整個序列的表示。
這種方法在圖像領域中也取得了不錯的效果。
-
GAP 預測
GAP(Global Average Pooling)是一種常見的特徵提取方法,將特徵圖的每個通道進行平均,得到一個向量。
一開始作者是用這種方式,但發現效果非常差!
仔細分析後發現,問題不是 GAP 的問題,而是「學習率」設太大了!
經過調整後,兩種預測方式都取得了不錯的效果。
在我們的經驗中,Transformer 架構對學習率非常敏感,這在 ViT 中也是如此。
自監督訓練
作者嘗試使用 MLM 的訓練方式:將 50% 的影像 token 進行破壞,方法包括:將嵌入替換為一個可學習的 [MASK](80%)、隨機替換為其他 token(10%)、或者保留原樣(10%)。
接著使用 JFT 資料集進行訓練,模型跑了 100 萬步(相當於 14 個 epoch),每個批次的大小是 4096。訓練過程中使用 Adam 優化器,基礎學習率設為 ,前 1 萬步進行熱身,並採用餘弦學習率衰減的策略。
在這個過程中,作者嘗試了不同的預測目標,包括:
- 預測平均的 3 位元顏色
- 預測 4×4 縮小版的 token
- 預測 16×16 完整的 token
實驗發現,上述這些方法都取得了不錯的效果(L2 稍微遜色)。
最後,作者選擇了效果最好的第一種方法,因為它在少樣本學習上表現最佳。此外,作者也還嘗試了 15%遮罩率,但發現這樣的設置的效果稍差。
但不管是哪一個方式,效果都比監督式的學習要差(落後 4% 的準確度)。
其他注意事項
除了主要論述的內容之外,還有一些訓練的技巧和注意事項:
- 使用 0.1 的 Weight Decay 進行訓練,作者發現這對於後續下游任務很有幫助。
- 當輸入影像解析度有變動時,會對應地改變輸入序列的長度(因為 Patch 的尺寸固定),這時候必須將學習好的位置編碼進行線性插值。
- 用 Adam 會比 SGD 更好,作者認為這是因為 Adam 能夠更好地處理學習率的問題。(現在大多改用 AdamW)
- 使用 1-D 的可學習的位置編碼,或是 2-D 的可學習的位置編碼,或是相對位置邊編碼,沒有太大的差別,但一定要選一個,如果都不選,效果會很差。
結論
這篇論文探索了 Transformer 在圖像領域的應用,提出了一種全新的架構 ViT。
ViT 在大資料集上的效果超越了傳統的卷積網路,並且在實驗中展現了更大的潛力。
這篇論文的發表,標誌著 Transformer 架構在圖像領域的成功應用,也為未來的研究開啟了新的方向。