[21.02] PVT

空間縮減注意力機制
Pyramid Vision Transformer: A Versatile Backbone for Dense Prediction without Convolutions
ViT 在影像分類上取得驚人的成績。
正式宣告 Transformer 架構踏入電腦視覺領域攻城掠地。
定義問題
ViT 架構在一開始就使用 16 x 16 的大核卷積,來進行圖像分塊(patchify)。
如果是一張解析度 224 x 224 的影像,經過分塊後,即變成 14 x 14 的影像。
這種解析度的影像,用來做影像分類是沒問題,因為分類需要依賴高度抽象的全局特徵。
但如果要進行密集預測的任務,例如影像分割或物件偵測等,這樣的分塊方式就會讓模型難以捕捉到局部細節。
- 因為細節都在 16 x 16 的特徵壓縮操作中消失了。
顯然地,我們需要更精細的特徵來進行密集預測,那麼把 16 x 16 的卷積改成 2 x 2 好嗎?
- 當然不好!
我們就以 224 x 224 的圖像為例:
- 使用 16 x 16 的分塊尺寸,我們會得到 14 x 14 共 196 個輸入 Token。
- 使用 2 x 2 的分塊尺寸,我們會得到 112 x 112 共 12,544 個輸入 Token。
試計算 12,544 x 12,544 的自注意力矩陣......
想必沒有人會認為這是一個好主意。
解決問題
模型架構
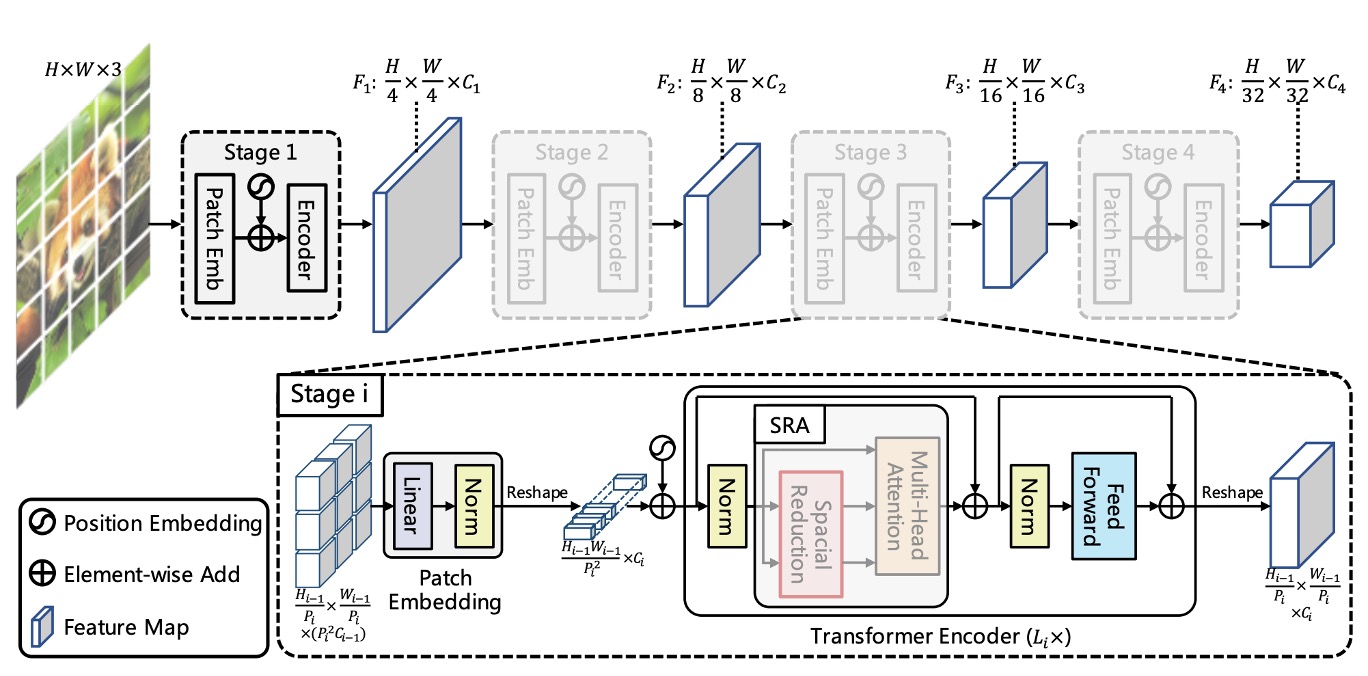
上圖展示了 PVT 的架構設計。
看起來好像很複雜,但你只要回想一下卷積網路的架構,就會發現這其實是個一模一樣的概念。
分層結構
首先看到的是分層結構,這就像是我們在 ConvNet 中常提到的 1/2 降維,總共分五個階段。
所以會有 1/2 尺寸的特徵圖、1/4 尺寸的特徵圖、1/8 尺寸的特徵圖,以此類推。
在 PVT 的架構中,從 1/4 尺寸的特徵圖開始,直到 1/32 尺寸的特徵圖。
降採樣的過程也是透過指定 stride 數值的卷積來實現。
舉例來說,輸入圖像為 3 x 224 x 224,指定 stride 為 4 的卷積,輸出通道數量為 64,那麼經過計算後,得到的特徵圖尺寸為 64 x 56 x 56。
所以在第一個 Stage 中,輸入 Transformer Encoder 的資料為:
- 序列長度:3136(所有影像切塊,即 56 x 56 個)
- 特徵數:64(每個切塊特徵數,即上面提到的通道)
空間縮減注意力(SRA)
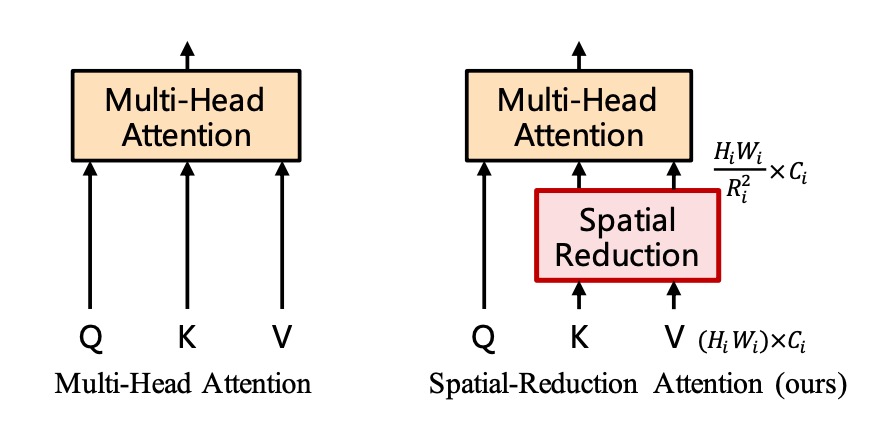
得到特徵圖像後,我們發現 (56 x 56) x (56 x 56) 的自注意力矩陣仍然非常巨大,必須嚴肅處理。
作者在這裡緊接著提出了「空間縮減注意力」(Spatial Reduction Attention)的概念。
方法是保留查詢(Query)的尺寸,縮減鍵(Key)和值(Value)的尺寸。
舉例來說,原始的自注意力圖的尺寸 得到 (56 x 56) x (56 x 56) 的注意力圖,如果把 Key 和 Value 的尺寸從 (56 x 56) 縮減為 (7 x 7) 的話,那麼最後的注意力圖尺寸就會變成 3136 x 49。
剛才看來過於龐大的自注意力矩陣,現在就可以接受了。
*
比照以往,我們直接看一下實作,就知道這篇論文的核心思想。
重點的部分我們用 Hightlight 標示出來,其中在本篇論文的中,sr_ratio 的設定是 [8, 4, 2, 1],也就是每個 Stage 的空間縮減比例。
在剛才的範例中,第一層原本的 56 x 56 縮減為 7 x 7。
# Reference:
# - https://github.com/whai362/PVT/blob/v2/classification/pvt.py
import torch
import torch.nn as nn
class SpatialReductionAttention(nn.Module):
def __init__(
self,
dim,
num_heads=8,
qkv_bias=False,
qk_scale=None,
attn_drop=0.,
proj_drop=0.,
sr_ratio=1
):
super().__init__()
self.dim = dim
self.num_heads = num_heads
head_dim = dim // num_heads
self.scale = qk_scale or head_dim ** -0.5
self.q = nn.Linear(dim, dim, bias=qkv_bias)
self.kv = nn.Linear(dim, dim * 2, bias=qkv_bias)
self.attn_drop = nn.Dropout(attn_drop)
self.proj = nn.Linear(dim, dim)
self.proj_drop = nn.Dropout(proj_drop)
self.sr_ratio = sr_ratio
if sr_ratio > 1:
self.sr = nn.Conv2d(dim, dim, kernel_size=sr_ratio, stride=sr_ratio)
self.norm = nn.LayerNorm(dim)
def forward(self, x, H, W):
B, N, C = x.shape
q = self.q(x).reshape(B, N, self.num_heads, C // self.num_heads).permute(0, 2, 1, 3)
if self.sr_ratio > 1:
x_ = x.permute(0, 2, 1).reshape(B, C, H, W)
x_ = self.sr(x_).reshape(B, C, -1).permute(0, 2, 1)
x_ = self.norm(x_)
kv = self.kv(x_).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
else:
kv = self.kv(x).reshape(B, -1, 2, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4)
k, v = kv[0], kv[1]
attn = (q @ k.transpose(-2, -1)) * self.scale
attn = attn.softmax(dim=-1)
attn = self.attn_drop(attn)
x = (attn @ v).transpose(1, 2).reshape(B, N, C)
x = self.proj(x)
x = self.proj_drop(x)
return x
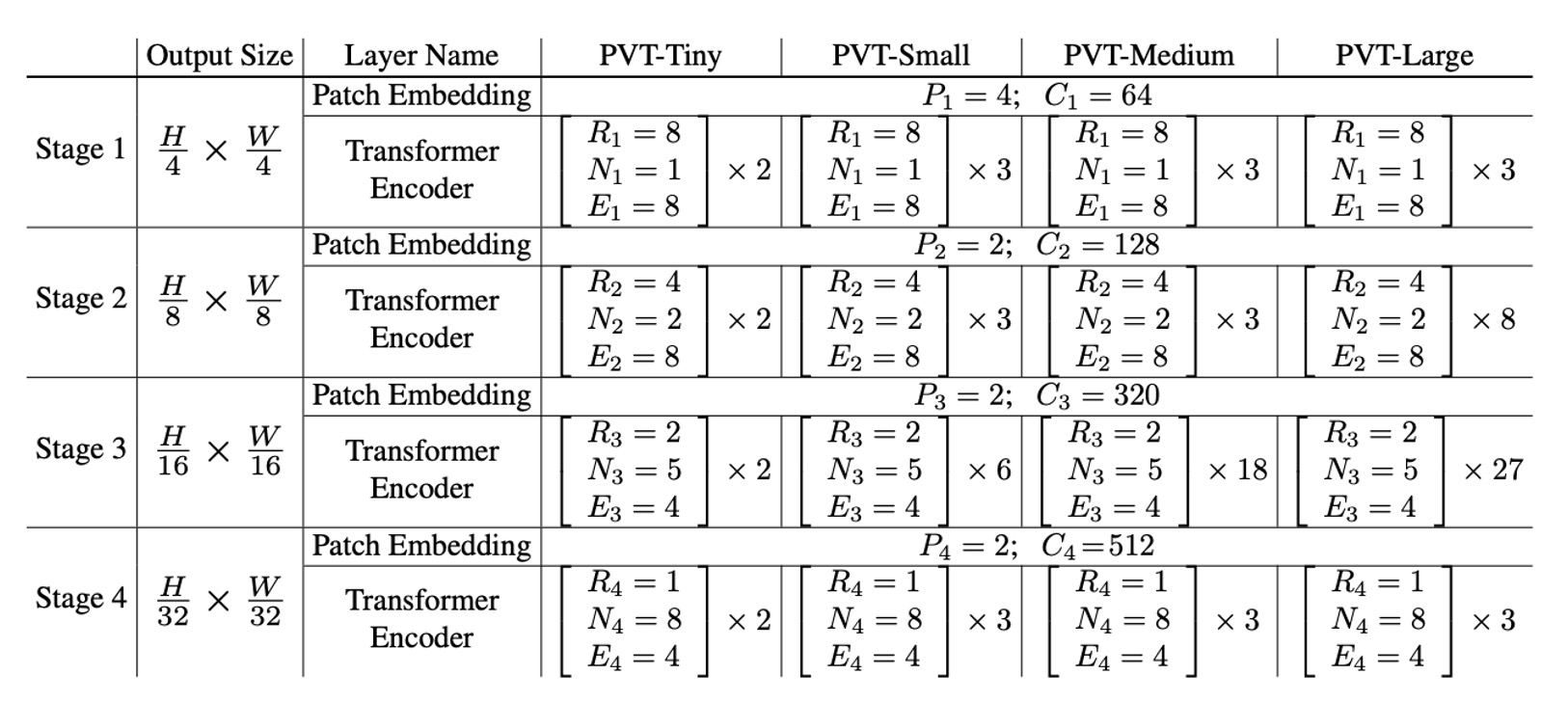
模型配置
最後,我們來看一下 PVT 的模型配置。
- :第 階段的補丁大小
- :第 階段輸出的通道數
- :第 階段中編碼器層的數量
- :第 階段中 SRA(空間縮減注意力)的減速比
- :第 階段中 SRA 的頭數
- :第 階段中前饋層的擴展比
模型設計遵循 ResNet 的設計規則:
- 在淺層階段使用較小的輸出通道數。
- 將主要計算資源集中在中間階段。
為了提供討論實例,下表展示了一系列不同尺度的 PVT 模型,分別是 PVT-Tiny、PVT-Small、PVT-Medium 和 PVT-Large。它們的參數數量分別與 ResNet18、ResNet50、ResNet101 和 ResNet152 相當。
討論
ImageNet 的性能
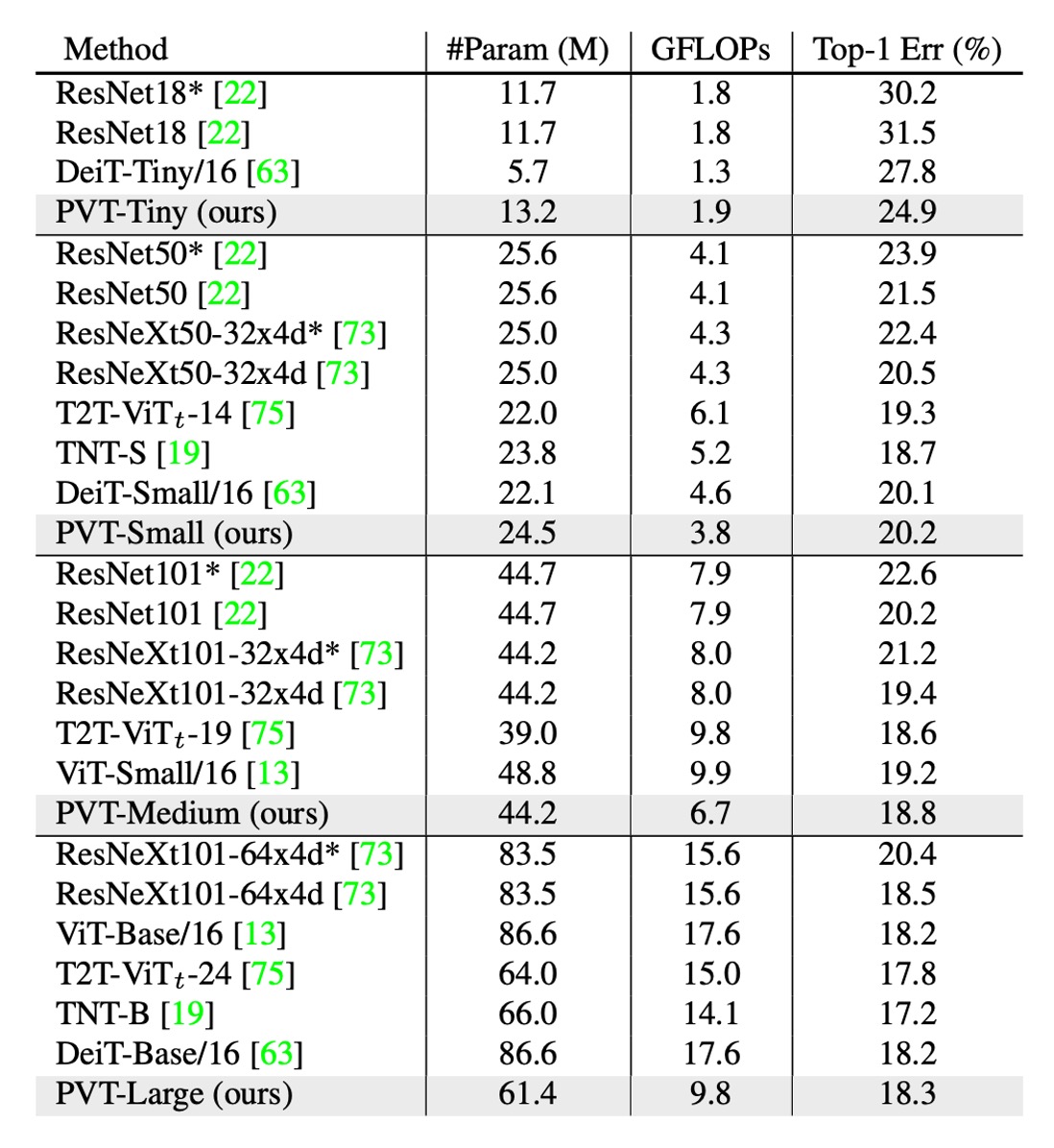
作者將 PVT 與兩個最具代表性的 CNN 主幹進行比較,即 ResNet 和 ResNeXt,這些模型廣泛用於許多下游任務的基準測試中。
在上表中,PVT 模型在相似的參數數量和計算預算下優於傳統的 CNN 主幹。
例如,當 GFLOP 大致相似時,PVT-Small 的 top-1 錯誤率為 ,比 ResNet50 的 高 個百分點( vs. )。
在相似或更低的複雜性下,PVT 模型的性能與最近提出的基於 Transformer 的模型相當,例如 ViT 和 DeiT。
PVT-Large 的 top-1 錯誤率為 ,與 ViT(DeiT)-Base/16 的 相當。
物件偵測性能
這個架構從一開始就瞄準了密集預測的任務,因此我們特別看一下 PVT 在密集預測任務上的性能。
-
資料集:
- 使用 COCO benchmark
- 訓練集:COCO train2017(118k 張影像)
- 驗證集:COCO val2017(5k 張影像)
-
模型與初始化:
- 標準偵測器:RetinaNet 和 Mask R-CNN
- Backbone 使用 ImageNet 預訓練權重初始化
- 新增的層使用 Xavier 初始化
-
訓練設定:
- 批次大小:16
- 硬體:8 個 V100 GPU
- 最佳化器:AdamW
- 初始學習率:
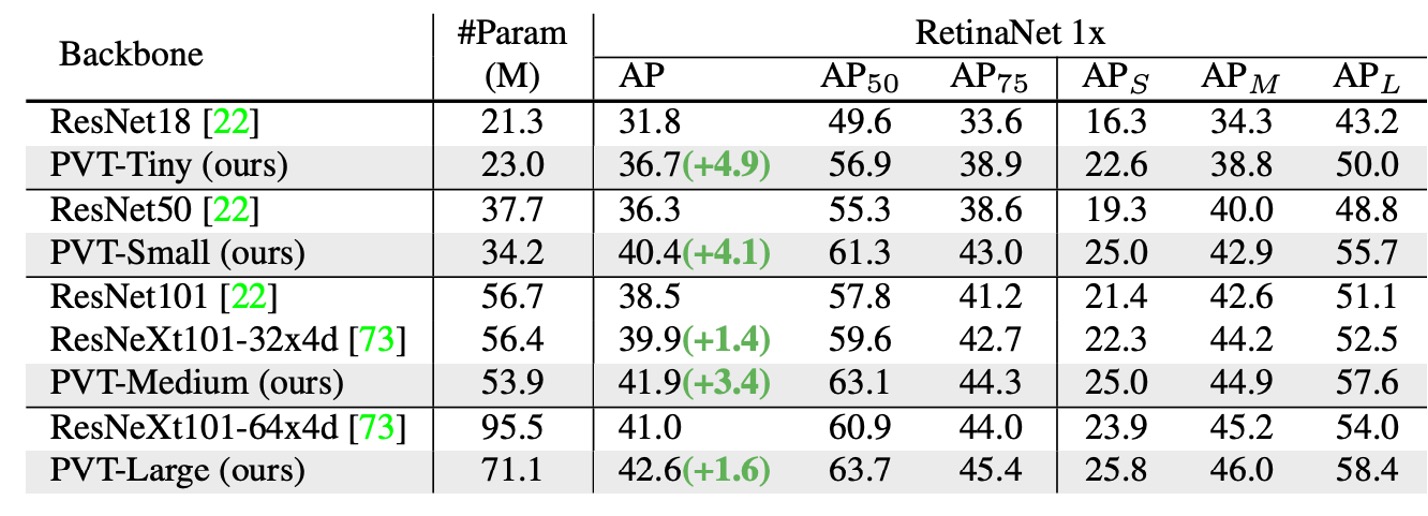
在可比的參數數量下,PVT 模型顯著優於傳統模型,使用 RetinaNet 時,PVT-Tiny 的 AP 比 ResNet18 高 4.9 點(36.7 vs. 31.8)。
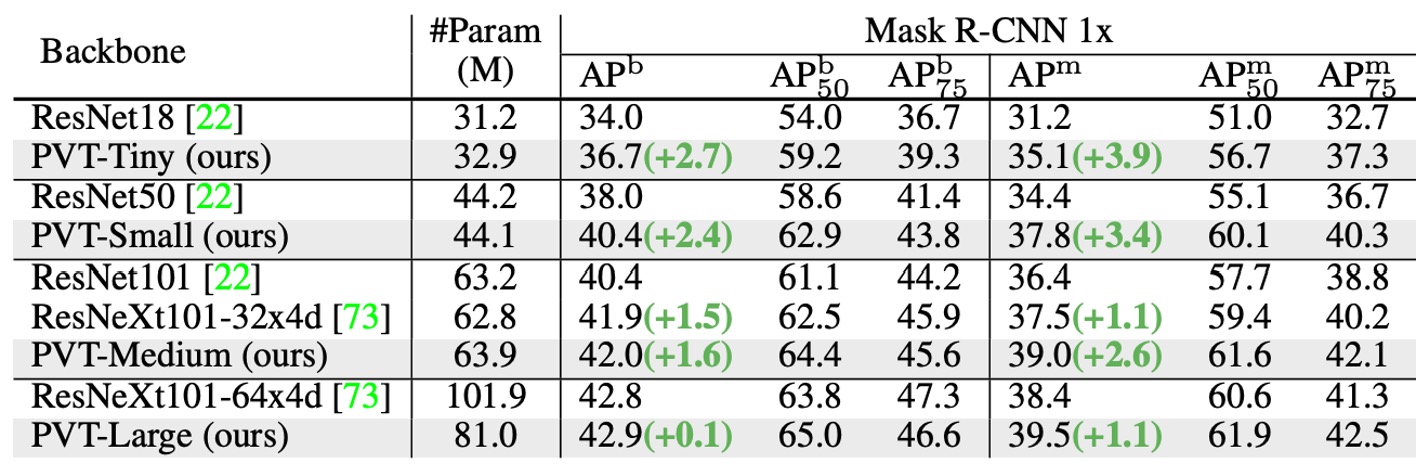
使用 Mask R-CNN 時,PVT-Tiny 的 mask AP (APm) 為 35.1,比 ResNet18 高 3.9 點(35.1 vs. 31.2),甚至比 ResNet50 高 0.7 點(35.1 vs. 34.4)。
這些結果表明,PVT 可以成為 CNN backbone 的良好替代方案,用於物件偵測和實例分割任務。
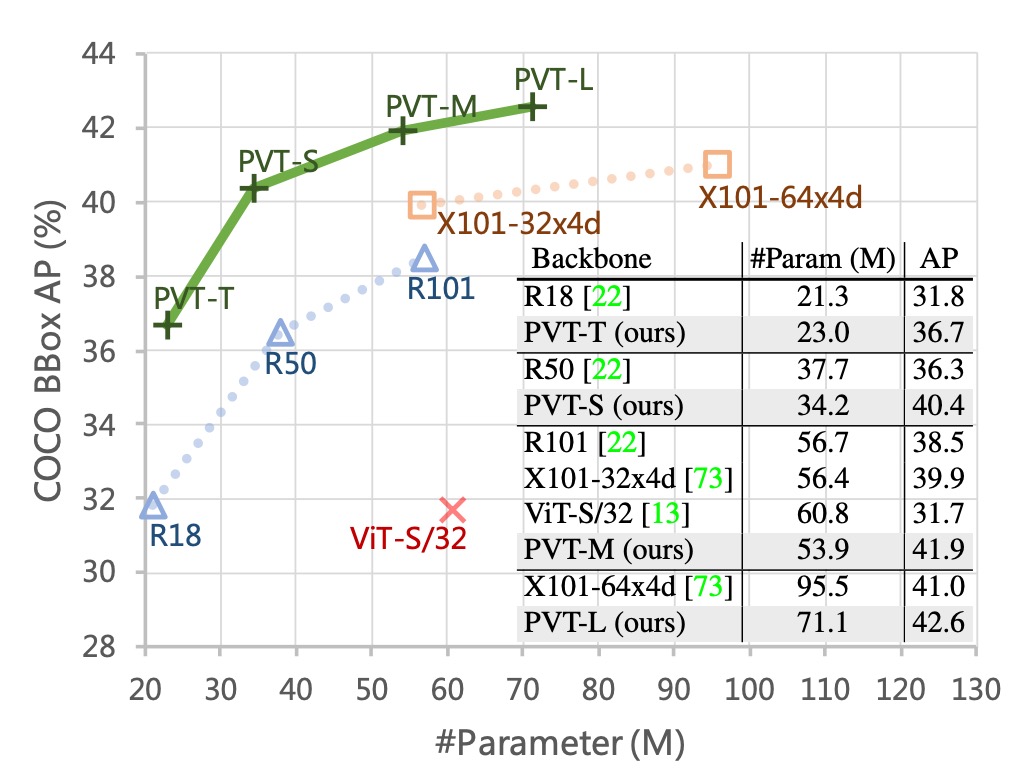
下圖展示了 PVT 在 COCO 驗證集上的結果。
金字塔結構的貢獻
最後作者進行了幾個消融實驗,以驗證 PVT 的各個部分對性能的影響。
首先看到的是金字塔結構的貢獻分析,如下表:
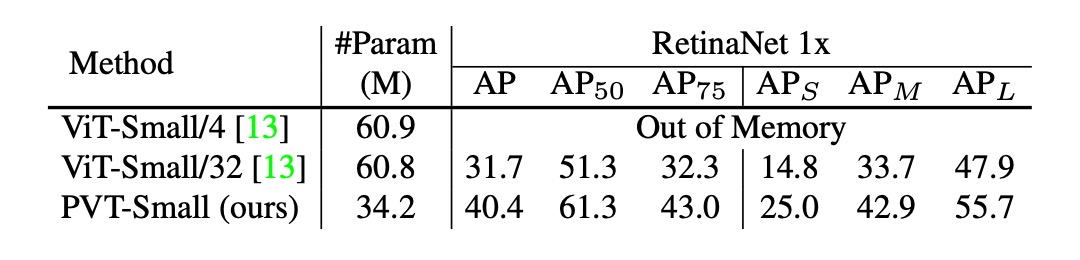
對比原始的 ViT 結構,PVT 的金字塔結構在 AP 分數上提高了 8.7 個百分點。
這表明金字塔結構的設計確實有助於提高密集預測任務的性能。
深度與寬度的權衡

作者進一步探討 PVT 應該更深還是更寬,以及不同階段的特徵圖尺寸對性能的影響。
將 PVT-Small 的隱藏維度乘以 1.4,與 PVT-Medium 參數數量相當,如上表。
實驗指出,在參數量相近的情況下,更深的模型性能更好。
治標不治本
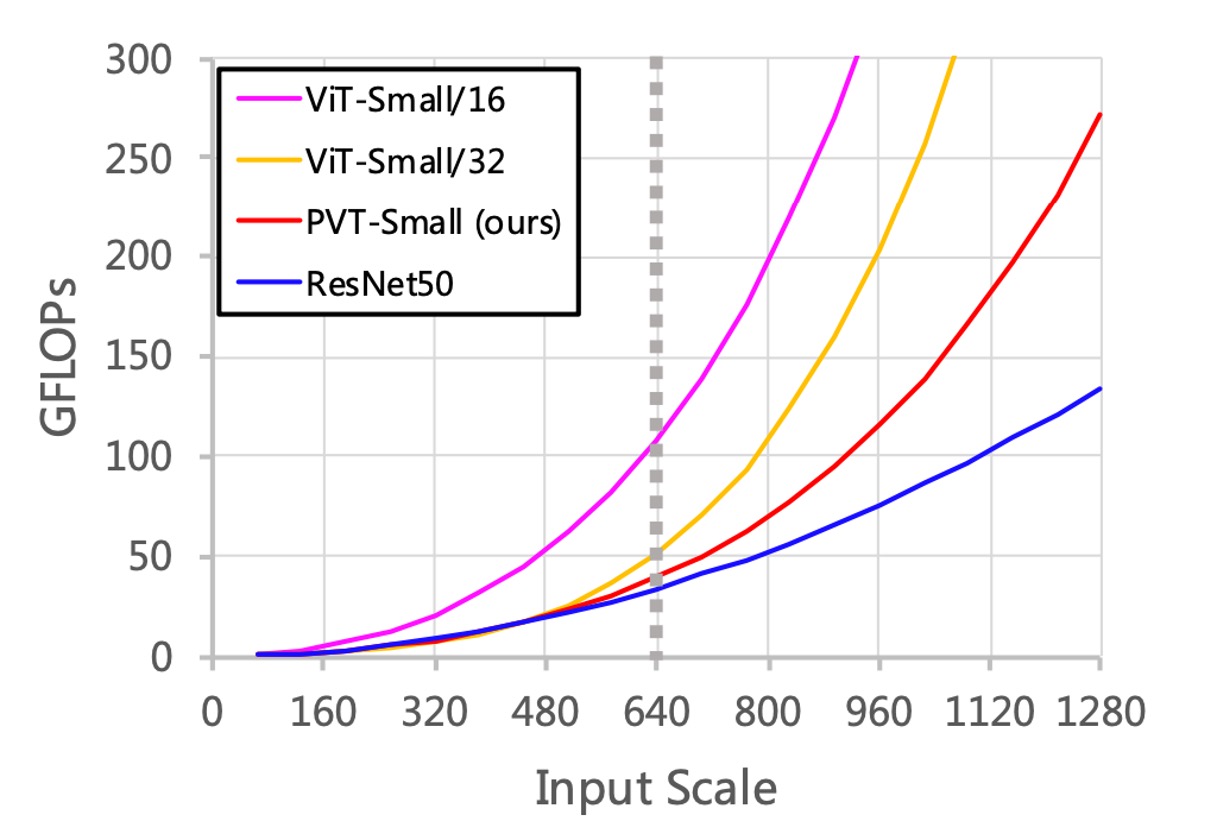
最後,作者針對效能的部分做了一些討論。
首先,隨著輸入規模增加,PVT 的 GFLOPs 增長率高於 ResNet,低於 ViT。
當輸入規模不超過 640×640 像素時,PVT-Small 和 ResNet50 的 GFLOPs 相似。
此外,當輸入影像固定為短邊為 800 像素時,基於 PVT-Small 的 RetinaNet 推論速度較慢。
也就是說,基於卷積網路的架構更能適應大尺寸的輸入,而這正是實務上提升性能的一個重要方向。
究其原因,SRA 機制只是將自注意力矩陣縮小,並沒有從源頭解決自注意力矩陣的計算複雜度問題。
結論
雖然在 2021 年這個時間點,本篇論文還是抓著 ResNet 和 ResNeXt 打,可能會讓人覺得有點保守。
但本研究將金字塔結構引入 Transformer,以提供一個純 Transformer 主幹網,用於密集預測任務,而不是針對特定任務的頭部或影像分類模型,為之後的研究提供了一個重要的方向。
此時也是基於 Transformer 的模型在電腦視覺中的應用的早期階段,未來有許多潛在的技術和應用有待探索。