[21.02] CPVT

條件位置編碼
Conditional Positional Encodings for Vision Transformers
ViT 提出後不久,各方面的研究紛至沓來。
如果你也常在使用 ViT 相關的架構,你一定也會有相同的困擾:這個「可學習式」的位置編碼,真的很難用啊!
定義問題
在 ViT 中,輸入影像會被切割成固定大小的圖像區塊,這些區塊會與對應的可學習絕對位置編碼相加。然而,這種位置編碼方式存在兩個主要問題:
序列拓展
絕對位置編碼的長度是固定的,這限制了模型處理比學習到的位置編碼更長的序列。
對於這個問題,或許我們可以直接捨棄位置編碼?
- 答案是不行!
捨棄位置編碼會大幅降低模型的性能,在 DeiT 的論文中已經做過這個實驗了, DeiT-tiny 模型在 ImageNet 上的準確率從 72.2% 驟降至 68.2%,可說是災難性的下降。
這其實不難理解,因為輸入序列的順序是很重要的線索,若沒有位置編碼,模型就無法獲取順序資訊。
平移等變性
平移等變性是指當物體在影像中移動時,模型的回應能夠相應改變。
在 ViT 架構中,每個區塊都會加上一個唯一的位置編碼,這使得模型失去了平移等變性,無法隨著物體在影像中的移動而產生相應變化。失去了這個特性,模型的性能會降低,特別是分類任務尤為明顯。
DeiT 模型的研究表明,可以通過插值技術將位置編碼延伸到與較長序列相同的長度,只是這種方法需要進行多輪微調,如果不做微調直接上,那模型的性能會大幅下降。
那改成相對位置編碼(Relative Positional Encoding, RPE)行不行?
- 答案是:可以解決上面的兩個問題。
但是由於無法提供絕對位置的資訊,根據實驗數據,相對位置編碼的表現不如絕對位置編碼。
 「相對位置編碼」和「絕對位置編碼」,在 ImageNet 資料集上,大約有 1.5% 的差距。
「相對位置編碼」和「絕對位置編碼」,在 ImageNet 資料集上,大約有 1.5% 的差距。
解決問題
條件位置編碼
為了解決上面提到的問題,作者提出了一種新的位置編碼方式:條件位置編碼(Conditional Positional Encodings, CPE)。
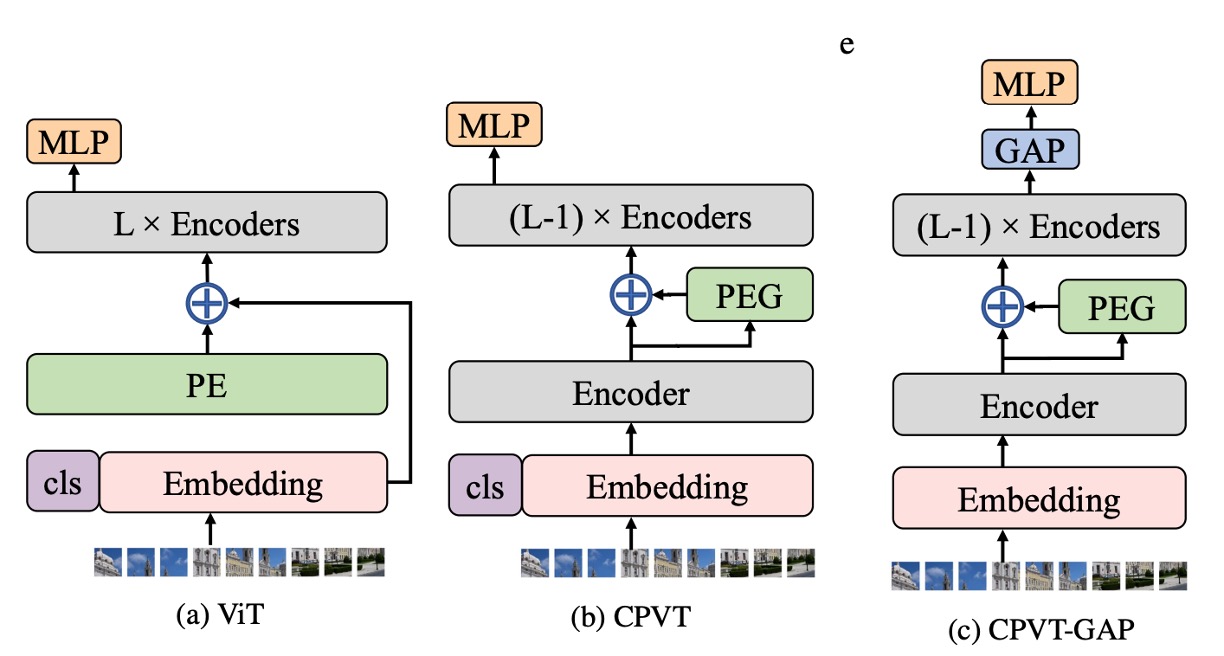
如上圖,最左邊的是原始的 ViT 架構,輸入影像經過 Patchify 之後,直接加上一個「可學習式」的絕對位置編碼。
中間的圖是作者提出的 CPE 架構,這裡的關鍵是:將位置編碼的計算過程放在了 Transformer 的 Encoder 中。
確切來說:是放在「第一層」 Encoder 之後,「第二層」 Encoder 之前。
這什麼操作?
等會兒再講,我們先繼續看 PE 的結構。
位置編碼生成器
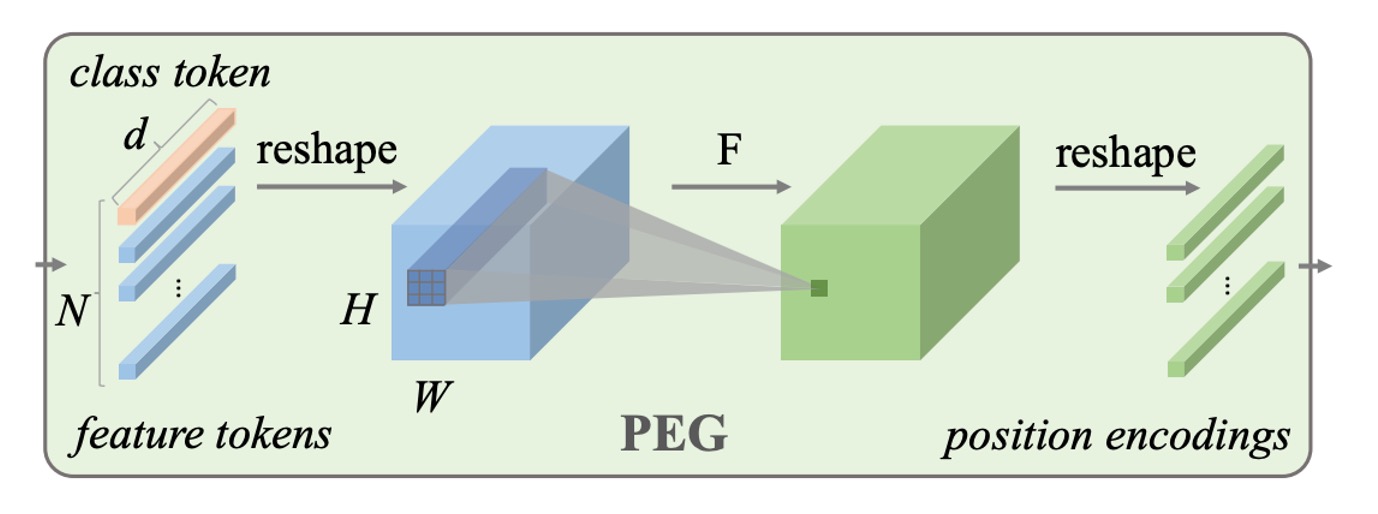
位置編碼生成器,在論文中名稱為:Positional Encoding Generator。
我們先撇開這個位置編碼放置的位置,單純來看一下這個 Generator 的結構:
- 就是一個 Conv2d 卷積!
意思就是,當我們把影像拆解成 Patch 之後,讓這些 Patch 會通過一個卷積層,生成對應的位置編碼。
這個卷積層是有講究的,它必須有 Zero Padding!這裡的 Zero Padding 是用來讓模型定位具體位置的方式。透過卷積的方式,模型就可以根據輸入的影像,動態生成對應的位置編碼,也就是這篇論文標題提到的:條件位置編碼。
論文中有提供實作的細節,我們可以簡單看一下:
import torch
import torch.nn as nn
class VisionTransformer:
def __init__(self, layers=12, dim=192, nhead=3, img_size=224, patch_size=16):
self.pos_block = PEG(dim)
self.blocks = nn.ModuleList([
TransformerEncoderLayer(dim, nhead, dim*4)
for _ in range(layers)
])
self.patch_embed = PatchEmbed(img_size, patch_size, dim*4)
def forward_features(self, x):
B, C, H, W = x.shape
x, patch_size = self.patch_embed(x)
_H, _W = H // patch_size, W // patch_size
x = torch.cat((self.cls_tokens, x), dim=1)
for i, blk in enumerate(self.blocks):
x = blk(x)
if i == 0:
x = self.pos_block(x, _H, _W)
return x[:, 0]
class PEG(nn.Module):
def __init__(self, dim=256, k=3):
# Only for demo use, more complicated functions are effective too.
self.pos = nn.Conv2d(dim, dim, k, 1, k//2, groups=dim)
def forward(self, x, H, W):
B, N, C = x.shape
cls_token, feat_tokens = x[:, 0], x[:, 1:]
feat_tokens = feat_tokens.transpose(1, 2).view(B, C, H, W)
x = self.pos(feat_tokens) + feat_tokens
x = x.flatten(2).transpose(1, 2)
x = torch.cat((cls_token.unsqueeze(1), x), dim=1)
return x
你可以看到 PEG 這個實作,就真的只有一個 Conv2d 卷積層,沒有多餘的東西。
模型訓練策略
為了驗證這個新的位置編碼方式,作者嚴格遵守 DeiT 的訓練策略,相關實驗配置如下:
-
資料集
- 本研究使用 ImageNet 資料集,包含 1000 個類別及 130 萬張影像,進行模型訓練。
- 評估結果則基於含有 5 萬張影像的驗證集。
- 沒有使用更大的 JFT-300M 資料集。
-
模型變體
- 針對不同的運算需求,作者設計了三個不同大小的模型。
- 所有實驗均在 Tesla V100 機器上執行。
- 訓練 Tiny 模型 300 個 epochs 約需 1.3 天(使用單一節點的 8 張 V100 GPU),CPVT-S 與 CPVT-B 模型則分別需要 1.6 天及 2.5 天。
-
訓練細節
- 除了 CPVT-B 模型外,其餘模型均訓練 300 個 epochs,使用 Tesla V100 機器,批次大小為 2048。
- 使用 AdamW 優化器進行訓練。
討論
PEG 的放置位置
剛才提到的「放置位置」,為什麼會放在 Encoder 的第一層之後,第二層之前?
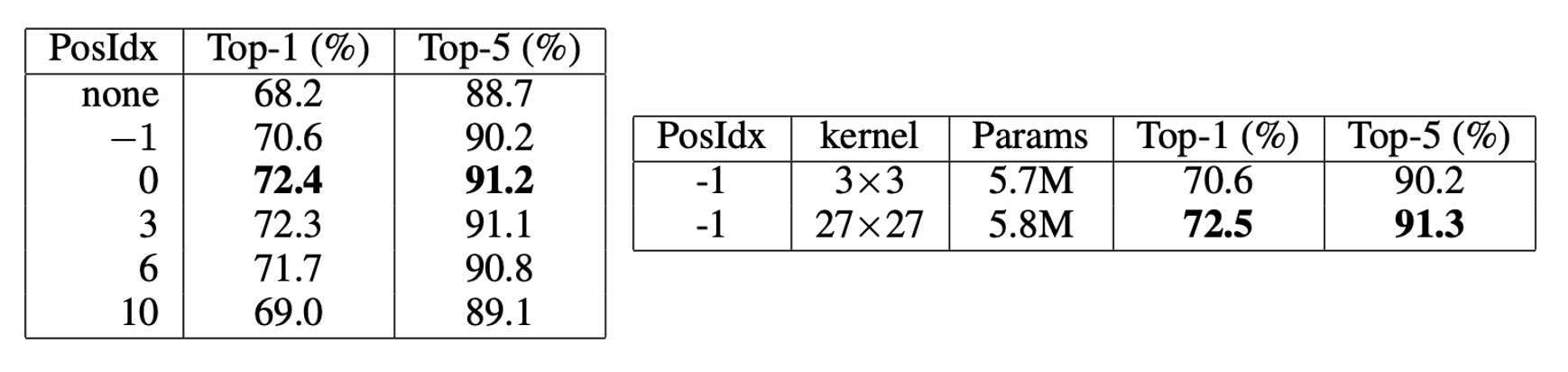
- 位置 0:第一個 Encoder 的輸出
- 位置 -1:第一個 Encoder 之前
作者嘗試將 PEG 放置於不同的模型位置,根據結果(上表左),當 PEG 放置於位置 0 或位置 3 時,模型的 Top-1 準確率達到約 72.4%,表現最佳。將 PEG 放置於位置 0 比放置於 -1 的效果更好,顯示位置 0 的性能明顯優於位置 -1。
觀察到兩個位置的主要區別在於它們的接收場範圍不同:位置 0 擁有全局接收場,而位置 -1 只能看到局部區域。如果擴大卷積核的大小,兩者應該會有相似的效果。
為了驗證這一假設,作者在位置 -1 使用了較大的卷積核(27×27,填充大小為 13),結果顯示其性能(72.5%)與位置 0 的效果相似,證實了這一假設。
但增加卷積核的大小會增加計算量,因此作者選擇將 PEG 放置於位置 0,以獲得更好的性能。
PEG 的改進來自哪裡?
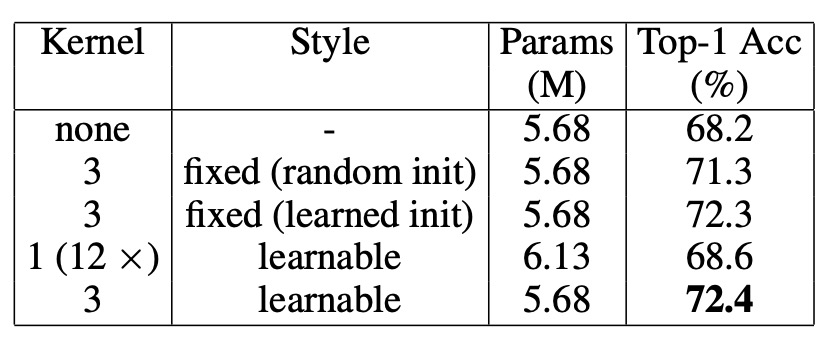
人們會懷疑 PEG 的改進來自於 PEG 中卷積層引入的額外可學習參數,而不是 PEG 保留的局部關係。為了測試 PEG 的主要作用,作者只在注意力層中使用 PEG 來計算 Q 和 K,以便僅傳遞 PEG 的位置信息。
如上表,在這種情況下,DeiT-tiny 的 Top-1 準確率達到了 71.3%,明顯優於無位置編碼的 DeiT-tiny(68.2%),且與在 Q、K 和 V 上使用 PEG 的結果相近(72.4%)。這表明 PEG 主要是作為一種位置編碼方案發揮作用,而非僅依賴於卷積層增加的可學習參數。
為了進一步排除 PEG 的性能提升是由於新增參數,作者設計了另一個實驗:隨機初始化一個 3×3 的 PEG 並固定其權重,結果 Top-1 準確率達到了 71.3%,比無任何位置編碼的 DeiT-tiny 高出 3.1%。由於 PEG 的權重是固定的,性能提升只能歸因於 PEG 引入的位置信息。
意思是使用一個「不能訓練」的卷積核,也能提升模型的性能。
相反地,當使用 12 層卷積層(卷積核大小為 1,即不產生局部關係)來替代 PEG 時,這些層的可學習參數遠多於 PEG,但性能僅提升了 0.4%,達到 68.6%。這進一步證實了 PEG 的效果主要來自於位置信息,而非額外的參數。
泛化到更高解析度
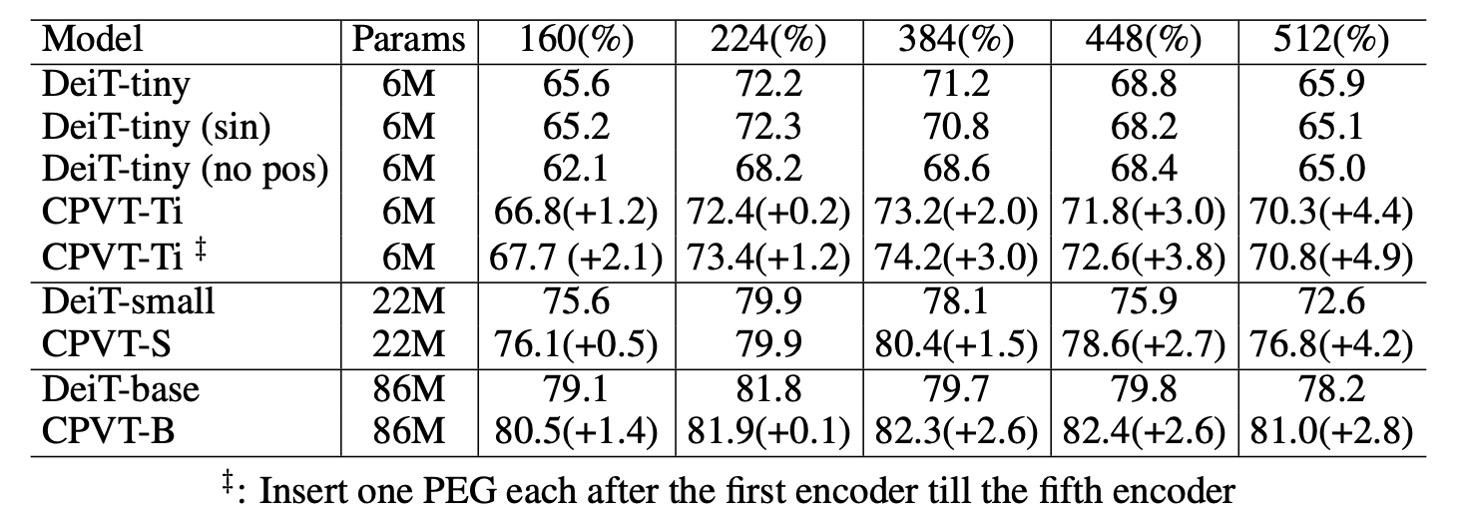
如上表所示,PEG 能夠直接泛化到更大的影像尺寸,而無需進行微調。這點透過評估在 224 × 224 影像上訓練的模型於更大解析度(384 × 384、448 × 448、512 × 512)影像上的表現來證實。
DeiT-tiny 模型在使用 384 × 384 輸入影像時,若配備可學習的位置編碼,性能從 72.2%降至 71.2%。 當使用正弦編碼時,模型性能從 72.2%降至 70.8%。
反觀 CPVT 模型配備 PEG 時,可以直接處理較大的輸入影像,且 CPVT-Tiny(CPVT-Ti)的性能從 73.4%提升至 74.2%(在 384 × 384 解析度下)。CPVT-Ti 的性能比 DeiT-tiny 高出 3.0%,且隨著輸入解析度增加,這個差距還會繼續擴大。
降低複雜度
在 PEG 中,若選擇深度卷積,其額外的參數數量為 (其中 是模型的維度, 是深度卷積的層數, 是卷積核大小)。如果使用可分離卷積,參數數量為 。
以 CPVT-Tiny 為例,當 且 時(即模型維度 ),PEG 帶來了 1,728 個參數。 DeiT-tiny 模型使用可學習的位置編碼,參數數量為 192 × 14 × 14 = 37,632。
因此,CPVT-Tiny 的參數比 DeiT-tiny 少 35,904 個。 即便使用 4 層可分離卷積,CPVT-Tiny 增加的參數數量僅為 960(38,952 − 37,632),這在 DeiT-tiny 總共 5.7M 的模型參數中幾乎可以忽略不計。
在 ImageNet 上的表現
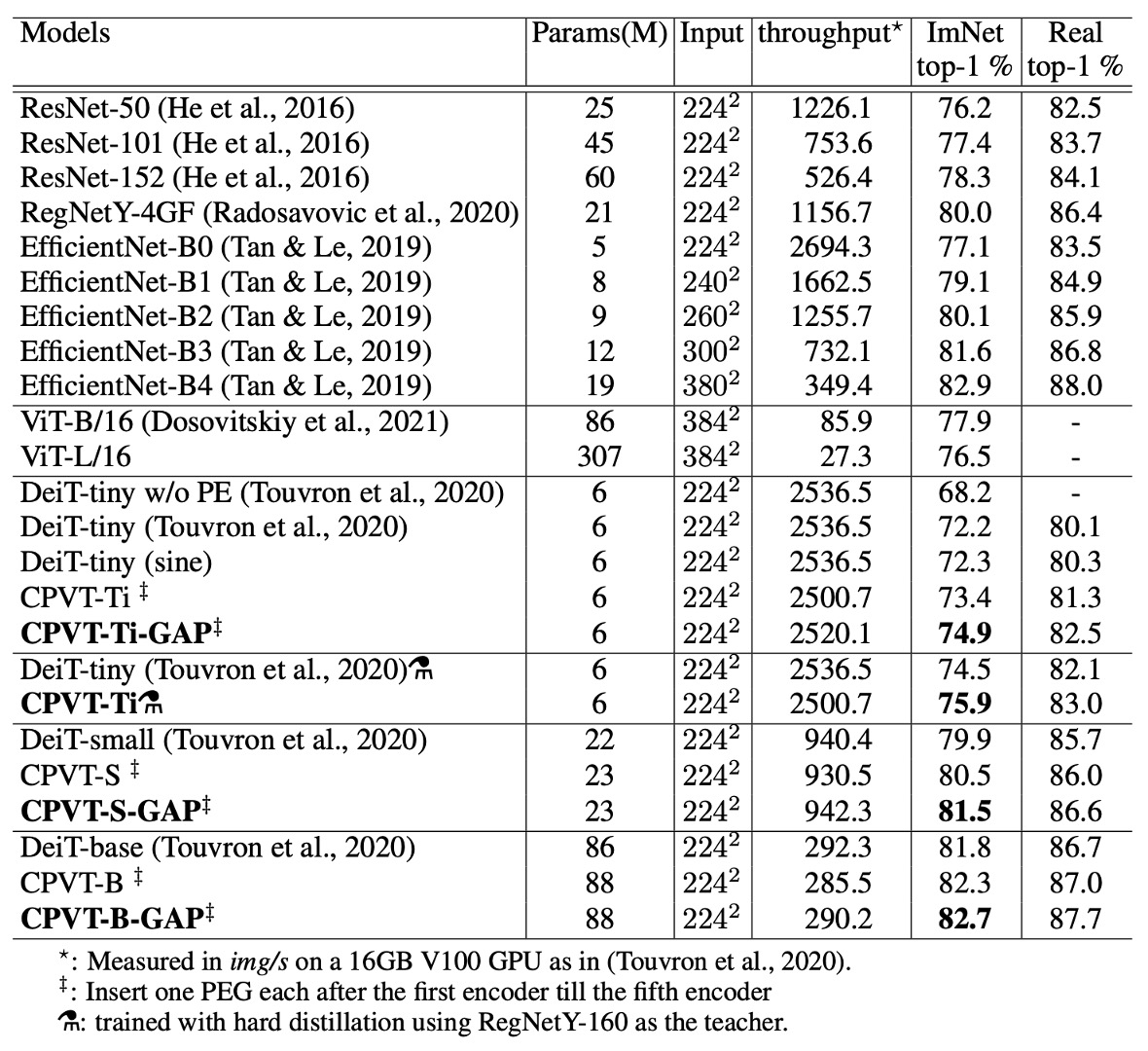
與 DeiT 相比,CPVT 模型在 Top-1 準確率上表現更佳,且推理速度相似。CPVT 模型可以在無需微調的情況下,隨著輸入影像解析度的提升獲得性能提升;而 DeiT 的性能在解析度增加時有所下降。
配備全局平均池化(GAP)的 CPVT 模型創下了 ViT 的新紀錄,達到當前的最佳性能。
CPVT-Tiny 和 DeiT-tiny 模型在進行額外的硬蒸餾訓練後進行比較,硬蒸餾方法採用了 RegNetY-160 模型作為教師模型。CPVT 模型的 Top-1 準確率達到 75.9%,超過 DeiT-tiny 模型 1.4%。
和其他位置編碼的比較
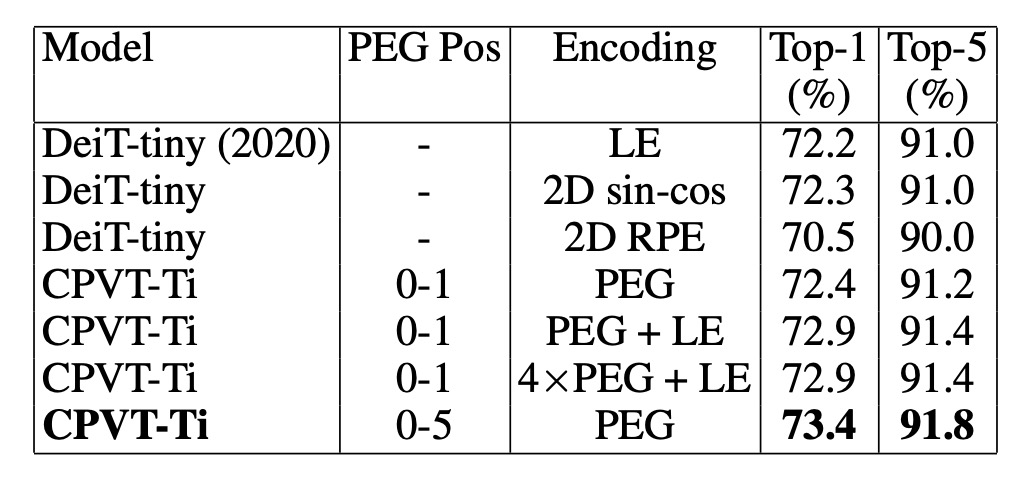
最後作者比較了 PEG 與其他常見的位置編碼方式,並分析了 PEG 與絕對位置編碼(APE)和相對位置編碼(RPE)的組合效果。
-
PEG 與其他位置編碼的比較
- DeiT-tiny 模型使用可學習的絕對位置編碼(LE)達到 72.2%的 Top-1 準確率。
- 使用 2D 正弦編碼的性能相當,達到相似的表現。
- 當使用相對位置編碼(RPE,範圍超參數 K 設為 8),其 Top-1 準確率為 70.5%,低於 LE。RPE 不編碼絕對位置信息,這也是其性能較低的原因之一。
-
PEG 與其他編碼結合的效果
將可學習的絕對位置編碼與單層 PEG 結合,基準模型 CPVT-Ti 的性能提高了 0.5%。當使用 4 層 PEG 時,模型的 Top-1 準確率達到 72.9%。如果在前五個 Transformer 區塊中添加 PEG,準確率進一步提升至 73.4%,優於將 PEG 堆疊在單一區塊中的效果。
結論
作者證明了 PEG 在處理長輸入序列和保持平移等變性時能顯著提升模型的表現,特別是在分類任務中,相較絕對位置編碼(APE)和相對位置編碼(RPE),PEG 展現出更優異的性能。
此外,PEG 的實現過程簡單,引入的額外計算成本和參數極少,使其成為一個有效且具實用價值的解決方案。
在做研究時總不免會分個派系,例如使用 Transformer 架構的時候絕對不用 CNN,或者是使用 CNN 的時候絕對不用 Transformer 等,才能凸顯自己的研究成果。
但從我們平常的施工現場來看,一個簡單有效,又能提升效能的方法,就是我們需要的。
我們找機會試試看,之後再來更新一下使用心得。