[21.05] ViTSTR

編碼器就好
Vision Transformer for Fast and Efficient Scene Text Recognition
ViT 架構已經廣為人知,但 STR 領域似乎還缺少了一個標誌性的用法。
定義問題
我們回過頭看一下經典的 STR 架構,大概是長這樣:
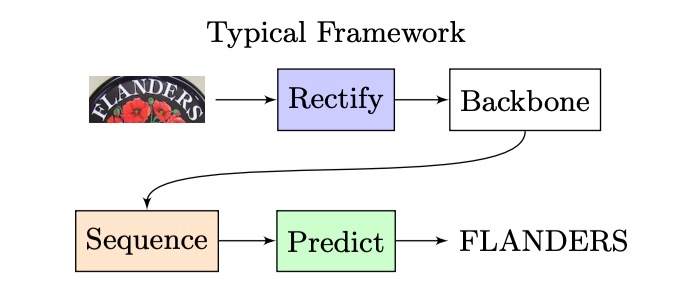
輸入一張影像,經過 CNN 提取特徵,然後進入 LSTM 進行序列解碼,最後經過一個預測模組來得到最終的預測結果。
當 Transformer 的架構提出後,研究者們開始將這個架構應用在這個領域,整體架構就演進成這樣:
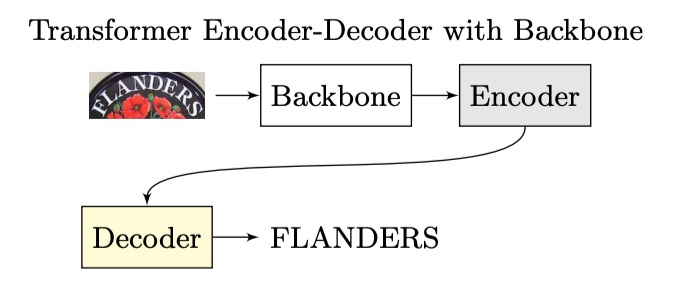
編碼器的部分可能是一個 CNN,也可能是一個 Transformer,或其他算法都可以,但解碼器就一致地換成 Transformer decoder。
因為不管我們要不要用自回歸的方式做推論,至少在訓練的時候是可以平行拓展,不需要等待前一個時間點的結果,就效率來說要提升不少。
而作者認為既然都已經用了 Transformer 了,為什麼不直接在編碼後直接輸出結果呢?
看看隔壁棚的 ViT,它不就是這樣做的嗎?
我們只需要把架構改成這樣:
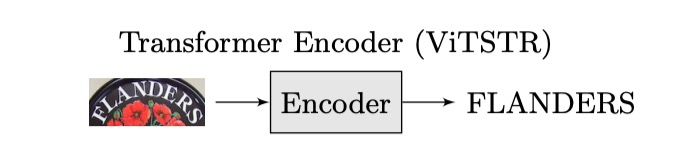
這樣改可以少掉一個 decoder,減少參數量,也不需要考慮自回歸的問題,是不是又快又好?
好不好還是得靠實驗來驗證。
解決問題
模型架構
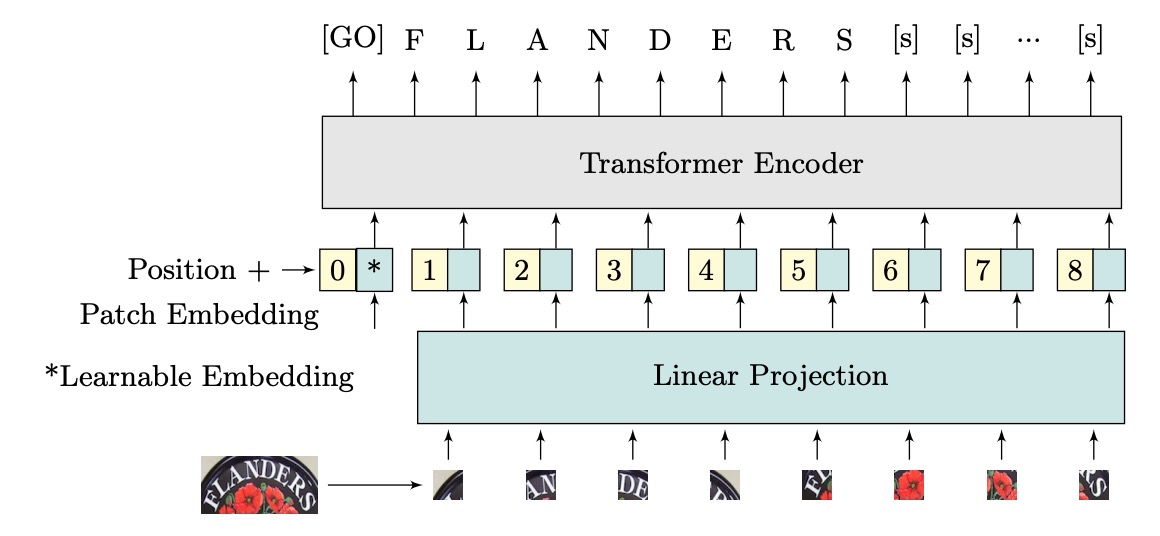
作者提出了 ViTSTR,一個基於 ViT 的 STR 模型。主要差異在於預測頭部。ViT 用於單物件分類,而 ViTSTR 則用於辨識多個字元,需考慮正確的字元順序與長度。
輸入的圖像維度為 ,其中 和 為圖像高度和寬度, 為通道數。圖像被重新塑形為一個由平坦化 2D 覆蓋區域組成的序列 ,覆蓋區域的維度為 ,序列長度為 。
平坦化後的圖像區域被轉換為維度為 的嵌入,這是通過線性投影實現的,並用可學習的類別嵌入(即 token)和位置編碼相加形成輸入編碼器的向量。
ViTSTR 使用可學習的位置編碼,並在輸出時,提取與文字序列長度相對應的特徵向量,加上兩個標記 token,分別是表示文本開始的 和結束的 token。
它就是 ViT。
具體計算細節,和 Transformer 的架構一樣都沒改,在此略過。
模型訓練配置
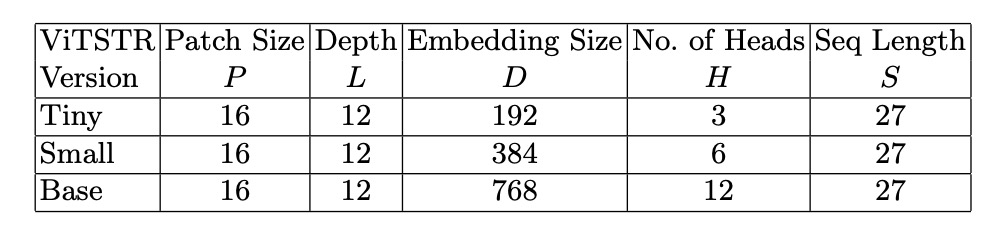
作者共使用三種不同的模型配置如上表,分別是 ViTSTR-Tiny、ViTSTR-Small 和 ViTSTR-Base。這三種模型的編碼器都是相同的,只是編碼器的深度和維度不同。
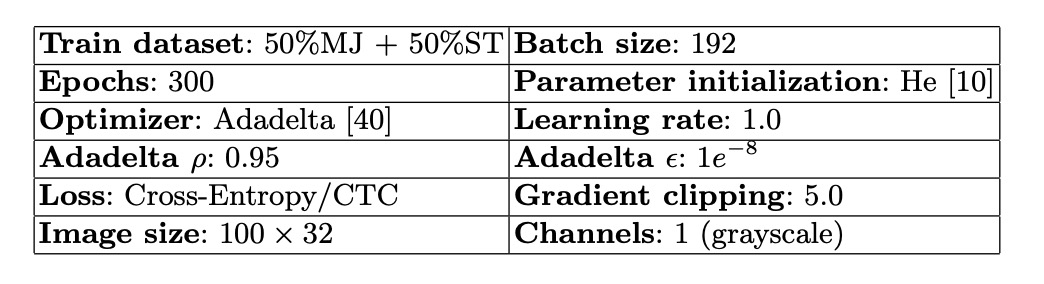
訓練配置參數如下:
作者重做了幾個強大的基準模型,包括:CRNN、R2AM、GCRNN、Rosetta、RARE、STAR-Net 和 TRBA,以便和 ViTSTR 進行公平的比較。
每個模型至少訓練 5 次,使用不同的隨機種子,並保存測試資料集上表現最好的權重,以獲得平均評估分數。
ViTSTR 使用 DeiT 的預訓練權重,同時將輸入圖像的大小調整為 ,以符合 DeiT 預訓練模型的維度要求,訓練時沒有凍結任何參數。
一般來說,文字辨識的輸入圖尺寸大多為 ,這裡作者使用 的圖像尺寸,感覺是有點浪費的。
討論
和其他模型的比較
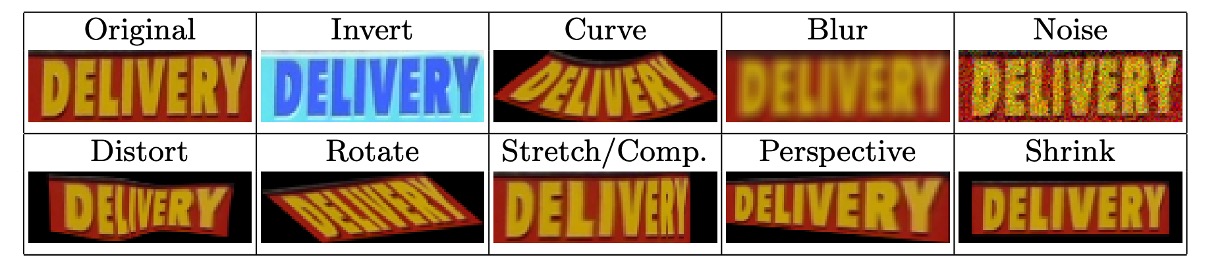
訓練時搭配 RandAugment 影像增強方式,包括反轉、彎曲、模糊、噪聲、扭曲、旋轉、拉伸、壓縮、透視和縮小,如下圖:
在比較中,作者也同步比較了增強和未增強的效果:
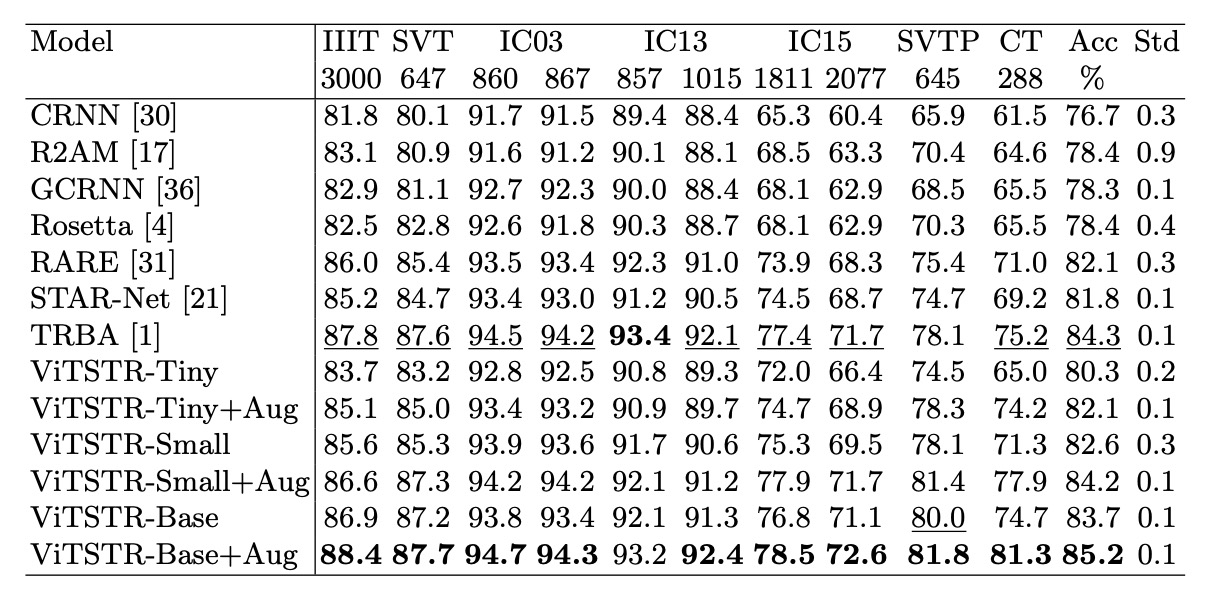
在 ViTSTR-Tiny 上,準確率提升了 1.8%;在 ViTSTR-Small 上,提升了 1.6%;而在 ViTSTR-Base 上,提升了 1.5%。
在不規則資料集上,準確率的提升最為顯著:
| 資料集 | ViTSTR-Tiny (%) | ViTSTR-Small (%) | ViTSTR-Base (%) |
|---|---|---|---|
| CT | +9.2 | +6.6 | +6.6 |
| SVTP | +3.8 | +3.3 | +1.8 |
| IC15 1,811 | +2.7 | +2.6 | +1.7 |
| IC15 2,077 | +2.5 | +2.2 | +1.5 |
效能損耗
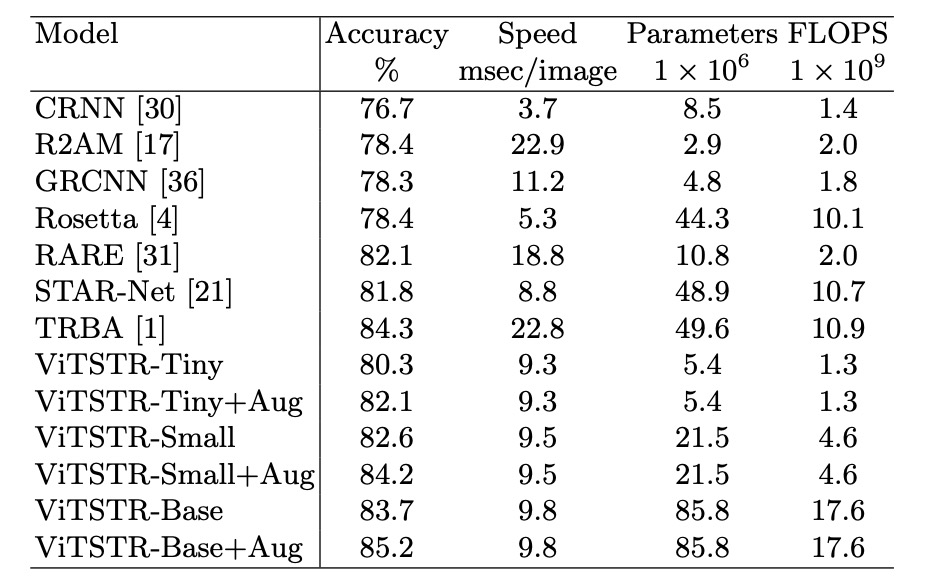
在場景文本辨識模型中,每當加入一個新階段,雖然準確率會提升,但速度變慢且計算需求增加。例如,從 RARE 模型升級到 TRBA,準確率提高了 2.2%,但需要增加 3880 萬個參數,並使每張圖片的處理時間減慢 4 毫秒。
當將 CTC 階段替換為 Attention(如從 STAR-Net 升級到 TRBA),計算時間從每張圖片 8.8 毫秒增加到 22.8 毫秒,準確率只提升 2.5%。事實上,將 CTC 換成 Attention 會比加入 BiLSTM 或 TPS 等階段導致更顯著的速度減慢,超過 10 倍。
在 ViTSTR 模型中,從 tiny 版本升級到 small 版本時,嵌入大小和多頭數量需要增加,但無需增加額外的階段。這樣的升級提升了 2.3% 的準確率,代價是增加 1610 萬個參數。
從 tiny 版本升級到 base 版本時,準確率增加了 3.4%,但參數數量增加了 8040 萬。
儘管參數數量增加,ViTSTR 的處理速度幾乎不變。這是因為編碼器中的 MLP 和 MSA 層依然使用相同的平行計算操作(如張量內積、softmax 和加法),只增加了張量的維度,因此每張圖片的處理時間僅增加 0.2 到 0.3 毫秒。
與多階段 STR 模型不同,新增模塊通常需要額外的順序層進行前向傳播,這無法平行處理,導致顯著的效能損耗。相比之下,ViTSTR 的升級僅涉及維度增加,效能損耗較小。
結論
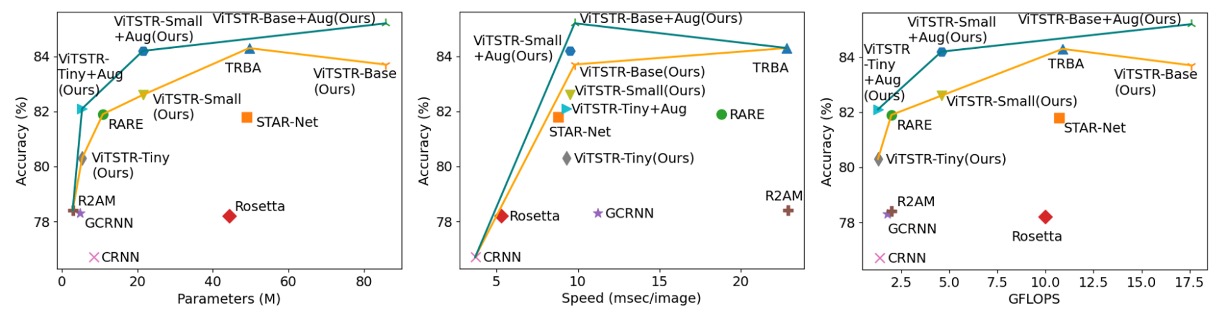
ViTSTR 是一種簡單的單階段模型架構,強調準確性、速度和運算要求之間的平衡。透過針對 STR 的資料增強,ViTSTR 可以顯著提高準確性,尤其是對於不規則資料集。當擴大規模時,ViTSTR 保持在平衡精度、速度和計算要求的前沿。
如果不是基於 DeiT 的預訓練權重,把特徵圖的尺寸調整為 ,從頭開始訓練,不知道效果會如何?
等哪天有空再來試試看吧。