[19.12] DAN

不准在一起
Decoupled Attention Network for Text Recognition
早期的研究中,大多使用 CTC 算法來作為最後輸出的解碼器,而近年來則是流行用帶有注意力圖的結構。原因也很簡單:效果通常比較好!
因此,幫模型加個注意力圖幾乎現在 STR 領域內的標準備配。
定義問題
可是注意力圖,不準啊!
注意力遺失
作者梳理了過去的研究,發現注意力圖的設計是基於特徵圖的,而不是基於文字的。
什麼意思?請看下圖:
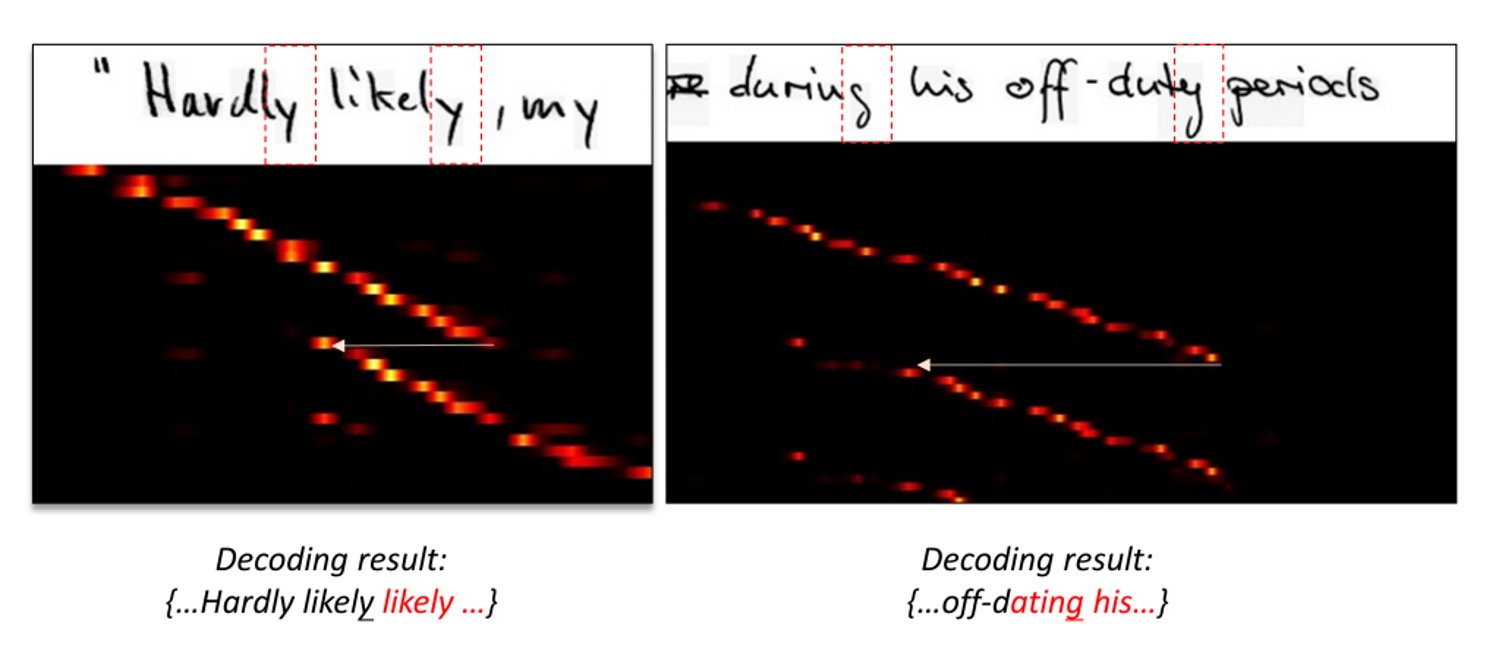
在圖中,上面是原始輸入圖像,下面是對應的注意力圖。
注意力圖的閱讀方式比較特別,他帶有序列資訊,最左上角是第一個字,最右下角是最後一個字。一個好的注意力分佈應該是一組呈現對角線的亮點,表示每個字都有對應的注意力區域。
回到上面的圖,我們可以看到注意力圖的分佈並不是對角線,而是在某個區域上,突然跳到另一個區域。這表示模型在這個時間點上沒有對應到正確的文字。
就作者分析,這是因為注意力圖的設計是基於特徵圖的,按照上圖中的例子:「ly」 這個詞,在不同序列點上的特徵圖可能是相似的,因此序列模型就「迷失」了。
輸出耦合
我們需要注意力圖,目的是為了要幫助模型對齊文字與圖像。
但對齊操作如果和解碼操作綁在一起,這表示在學習的過程中,匹配對齊的結果一定會受到解碼器的輸出結果所影響。不可避免的導致錯誤累積和傳播。
所以,對齊操作和解碼操作,你們不准在一起!
作者如是說。
解決問題
模型架構
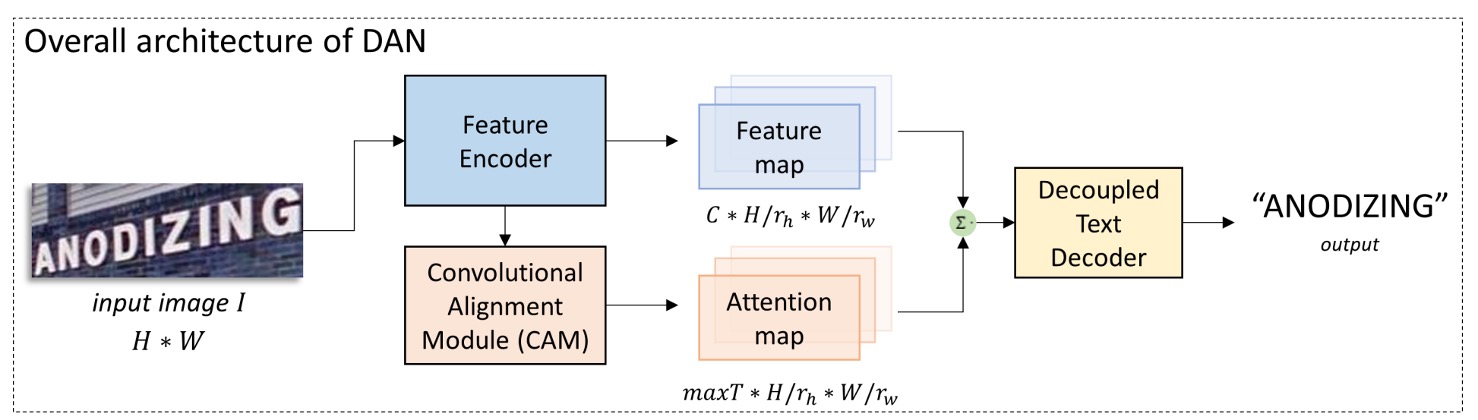
為了解決耦合的問題,作者提出了 DAN 架構,如上圖。
這個架構的想法非常簡單,就是為了注意力而單獨設計一個分支,讓這個分支來預測文字的位置。我們分階段來看這個架構:
特徵提取
這個部分是一個 CNN 網路,用來提取圖像的特徵,沒什麼好說的。
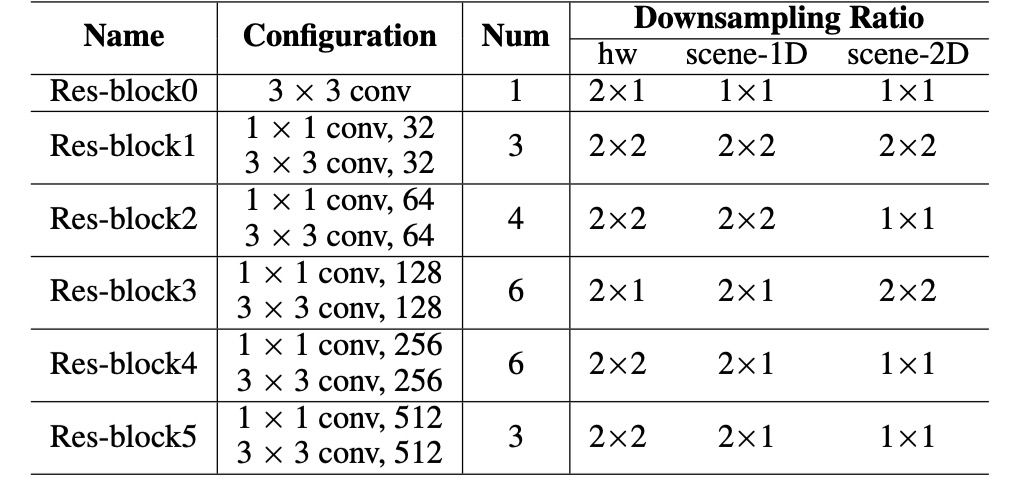
作者採用與前人研究類似的 CNN 特徵編碼器,而不是用標準的 ResNet,參數配置如下:
將輸入影像 (尺寸 )編碼成特徵圖 :
其中, 是輸出通道數, 和 為高度和寬度的降採樣比例。
對齊模組
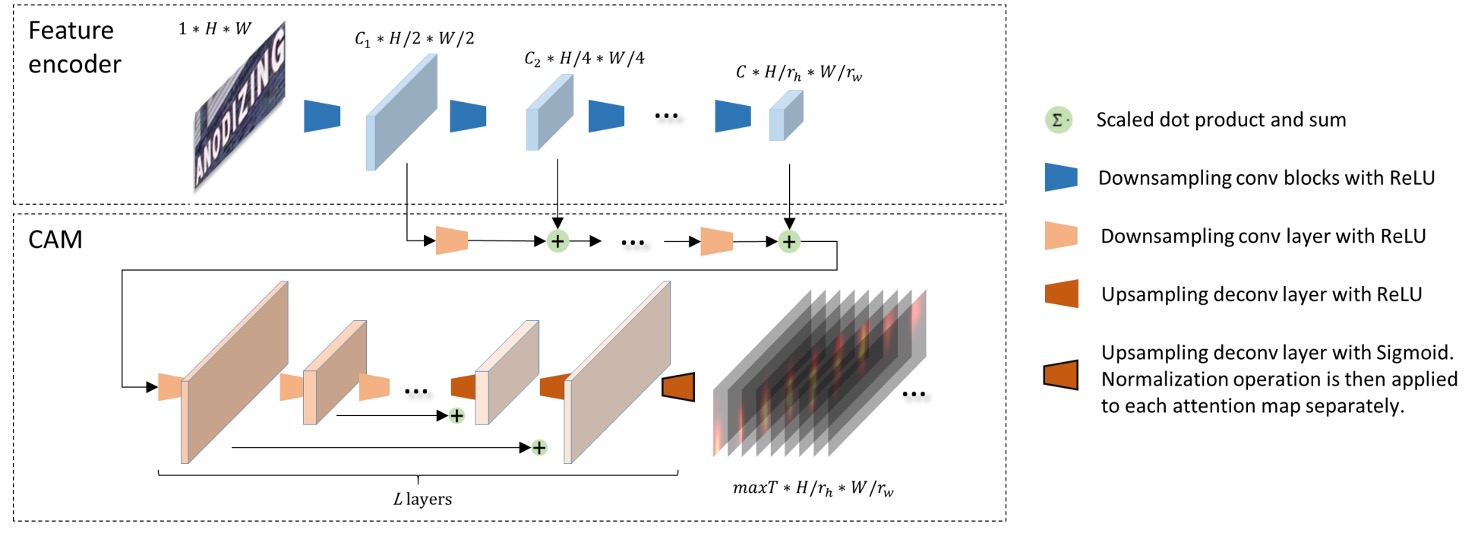
卷積對齊模組,Convolutional Alignment Module,後續簡稱 CAM。
CAM 從特徵編碼器獲取多尺度視覺特徵,並通過階層降採樣卷積層進行處理。受到 FCN 的啟發,CAM 進行逐通道的注意力運算,每個通道代表一個類別的熱圖。
CAM 的結構包含 層,在上採樣(作者使用反卷積)階段,每個輸出特徵與卷積階段的對應特徵圖相加,最終通過 sigmoid 函數和逐通道歸一化產生注意力圖:
這個 就是解碼器的最大時序長度,每張注意力圖的尺寸為 。
在最後輸入解碼器的時候,每個時序都有一個對應的特徵圖,這個特徵圖就是對應原圖的文字區域。
如果你對這個步驟感到疑惑,那就用 FPN 去理解它就好。
解耦式解碼模組
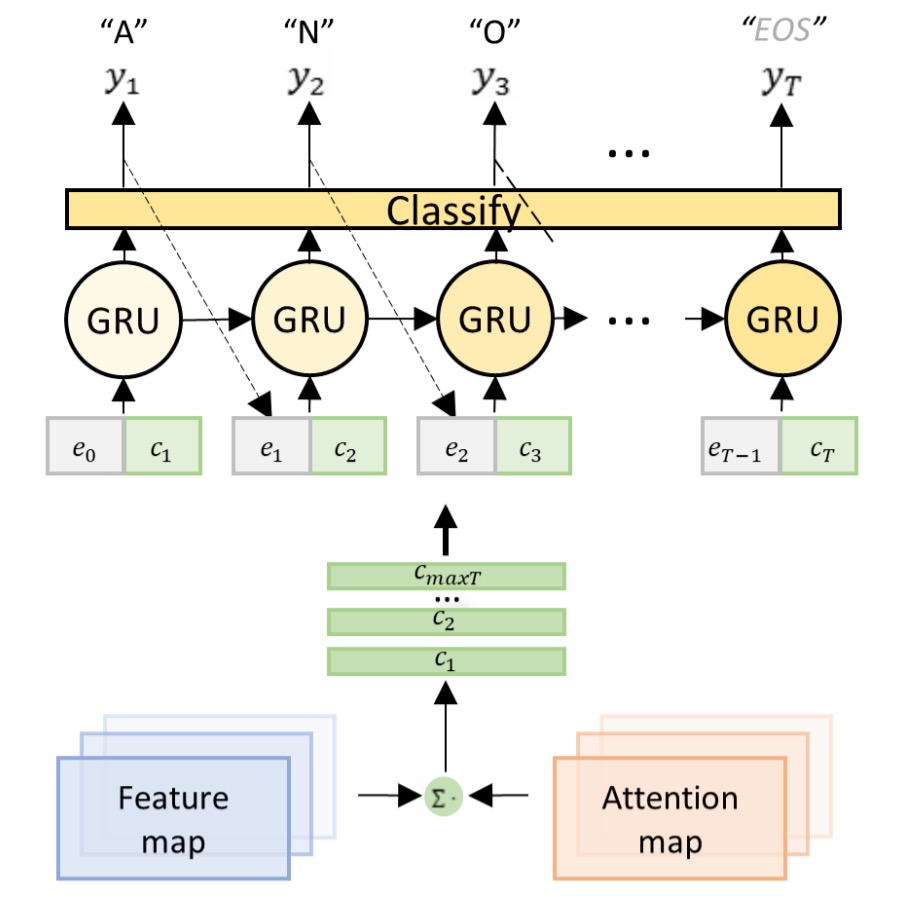
傳統的注意力解碼器會同時進行對齊和辨識,而 DAN 的解碼器僅進行辨識。
解碼器以編碼後的特徵圖和注意力圖作為輸入,計算時間步驟 的上下文向量 :
分類器在時間步驟 生成輸出 :
其中, 是 GRU 的隱藏狀態:
為前一解碼結果 的嵌入向量。
DAN 的損失函數為:
其中, 為 DAN 中的所有可訓練參數, 為步驟 的真實標籤。
CAM 的靈活性與 1D/2D 辨識模式
通過控制降採樣比例 和改變 CAM 的步距,DAN 可以在 1D 和 2D 模式之間切換:
- 當 時,DAN 成為 1D 辨識器,適用於長而規律的文字辨識。
- 當 時,DAN 成為 2D 辨識器,適合不規則文字的場景辨識。
手寫文字辨識訓練策略
選用兩個驗證用的數據集:
-
IAM 手寫資料集(IAM Dataset)
- 基於 LOB 語料庫的手寫英文文字。
- 訓練集:747 份文件(6,482 行)
- 驗證集:116 份文件(976 行)
- 測試集:336 份文件(2,915 行)
-
RIMES 手寫資料集(RIMES Dataset)
- 包含手寫法文信件。
- 訓練集:1,500 段落(11,333 行)
- 測試集:100 段落(778 行)
在兩個資料集中,使用整行文字的訓練集,並採用開源資料增強工具進行訓練。
將輸入影像的高度正規化為 192,寬度依照原始比例縮放(最大至 2048)。為了將特徵圖降為 1D,在特徵編碼器的末端添加了一個尺寸為 的卷積層。
將 設為 150,以涵蓋最長的文字行。所有 CAM 的卷積層(除了最後一層)設置為 128 個通道,以處理最長的文字長度。
測試時使用六種預定策略裁剪影像,例如 10 表示裁剪掉上方和下方各 10 行。將所有裁剪結果與原始影像進行辨識,平均輸出機率計算分數,並選擇最高分數的結果作為最終結果。
性能指標使用 字元錯誤率(CER%) 和 單詞錯誤率(WER%) 作為評估指標:
編輯距離計算辨識結果與真實標籤之間的差異。
實驗過程中未使用任何語言模型或詞典,確保模型性能的純粹性。
場景文字辨識訓練策略
選用七個常見的場景文字資料集:
-
規則場景文字資料集:
- IIIT5K-Words:來自網路,共有 3,000 張裁剪後的單字影像。
- Street View Text (SVT):來自 Google Street View,共 647 張單字影像。
- ICDAR 2003 (IC03):包含 251 張標註有文字框的場景影像,總計 867 張裁剪影像。
- ICDAR 2013 (IC13):基於 IC03 擴展而來,共 1,015 張裁剪影像,無詞典輔助。
-
不規則場景文字資料集:
- SVT-Perspective (SVT-P):來自 Google Street View 的側視角影像,共 639 張裁剪影像。
- CUTE80:專注於曲線文字,包含 80 張高解析度自然場景影像,共 288 張裁剪影像。
- ICDAR 2015 (IC15):包含 2,077 張裁剪影像,其中大部分為模糊且多方向的影像。
訓練資料使用兩組合成文字資料集進行訓練 ModelSynth 和 SynthText。輸入影像大小高度設為 32,寬度根據原始比例縮放(最大至 128)。
其他模型參數設定:
- ,表示最大輸出步驟為 25。
- CAM 的深度 ,除了最後一層外,其餘層的通道數設為 64。
- 使用 bi-directional decoder 進行最終預測。
- 採用 ADADELTA 進行優化,初始學習率為 1.0,第三輪後降為 0.1。
討論
手寫文字辨識性能
-
IAM 資料集:
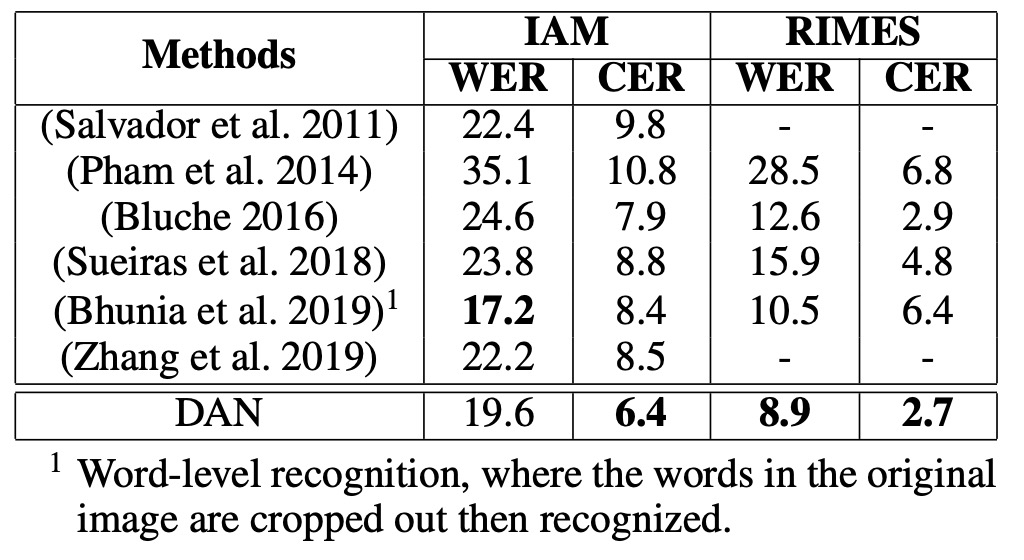
- DAN 在 CER 上優於先前的 SOTA 模型,提升 1.5%。
- WER:雖然 (Bhunia et al., 2019) 的模型在 WER 上表現較佳,但他們的模型需要裁剪後的單字影像,而 DAN 能直接辨識整行文字,顯示出更大的應用彈性。
-
RIMES 資料集:
- CER:比 SOTA 差 0.2%。
- WER:相對於 SOTA,有 3.7% 的誤差減少(相對誤差減少 29%)。
- DAN 在 WER 上的顯著改進說明其更強的語意學習能力,特別有助於處理長文字的辨識。
消融實驗
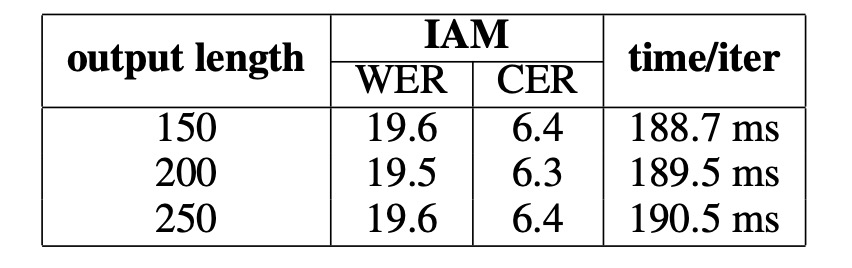
根據實驗結果,「不同的輸出長度」不會顯著影響效能,並且額外通道所需的運算資源可以忽略不計。只要設定的輸出長度合理(長於文字本身),DAN 的性能不會受到影響。
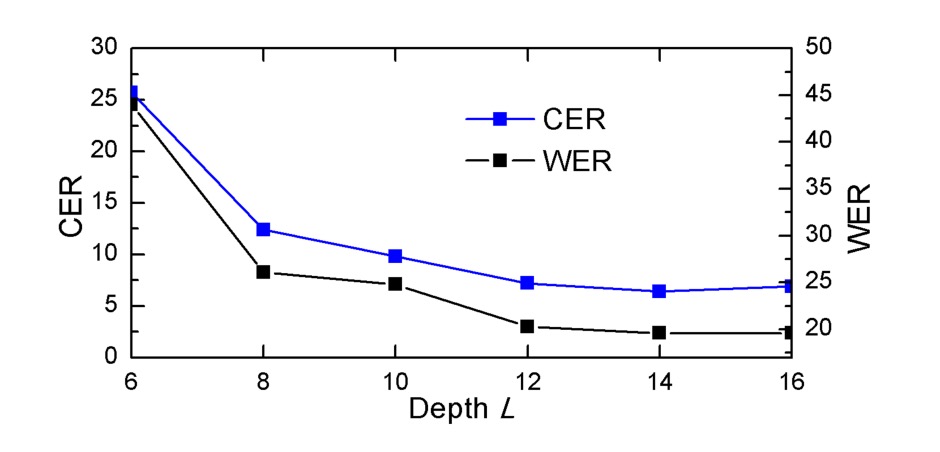
隨著深度 L 的減少,DAN 的性能「顯著下降」,表明 CAM 需要足夠的深度來達到良好的對齊效果。要成功對齊一個字元,CAM 的感受野(receptive field)必須足夠大,以覆蓋該字元及其相鄰區域的特徵。
對齊錯誤分析
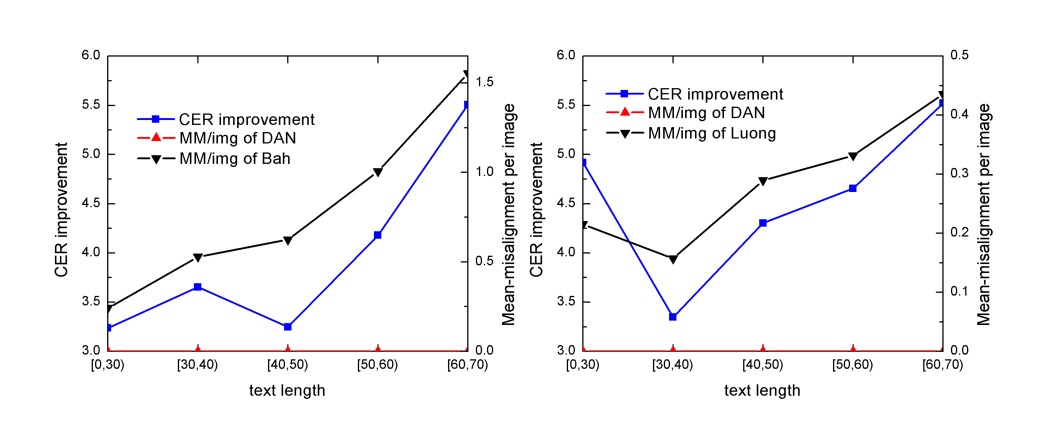
分析方式為找出具有最大注意力分數的區域作為「注意力中心」。
若當前的注意力中心位於上一個中心的「左側」,記錄為一次錯誤對齊。將測試樣本根據文字長度分為五組:[0, 30)、[30, 40)、[40, 50)、[50, 60)、[60, 70),每組包含超過 100 個樣本。每組的錯誤對齊數據加總後,計算每張影像的平均錯誤對齊次數(MM/img)。
結果分析 CER 改進與錯誤對齊消除的趨勢幾乎一致,說明 DAN 的效能提升來自於「減少了錯誤對齊」。
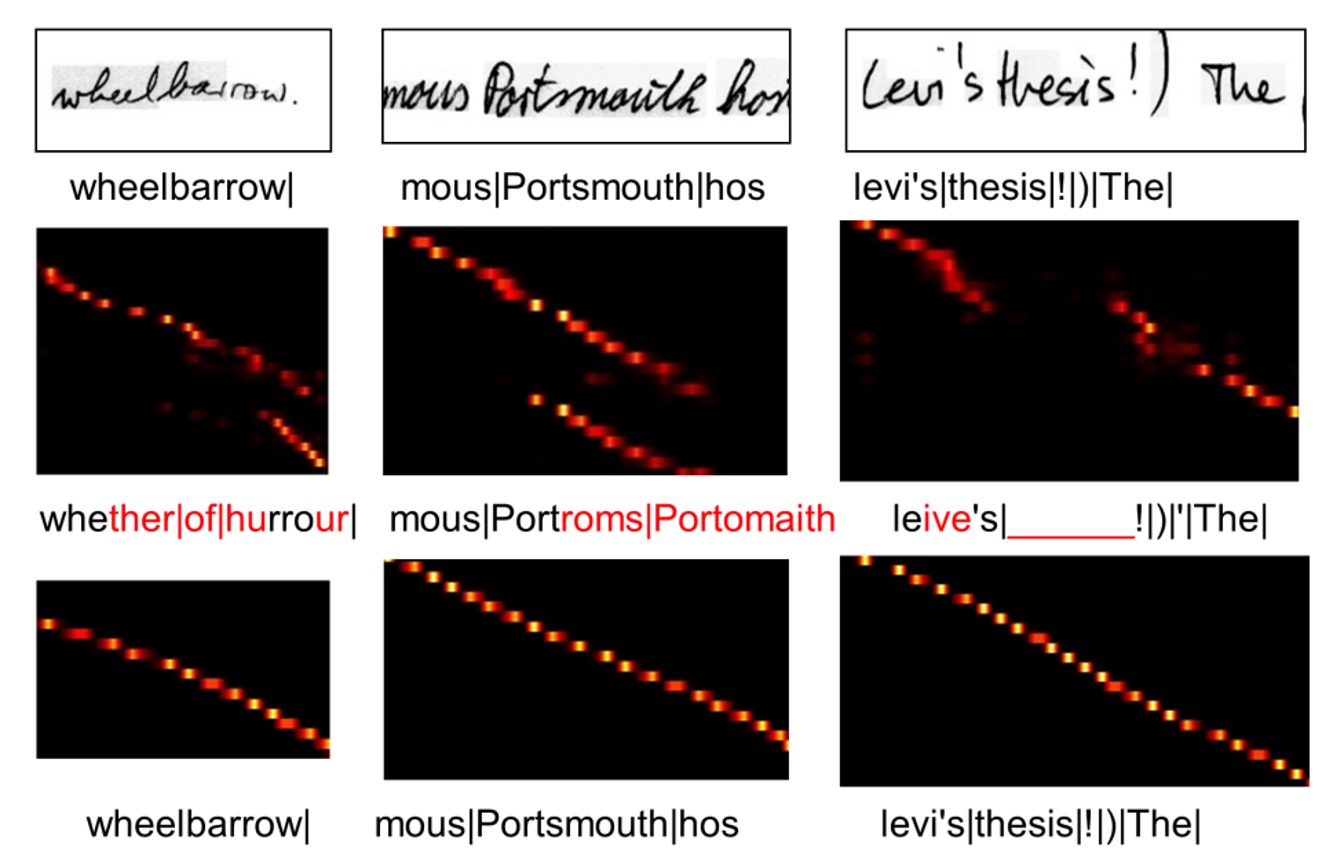
下圖顯示了 DAN 消除錯誤對齊的範例,最上層是輸入影像,中間是基於傳統注意力機制的對齊結果,最下層是 DAN 的對齊結果。
辨識錯誤分析
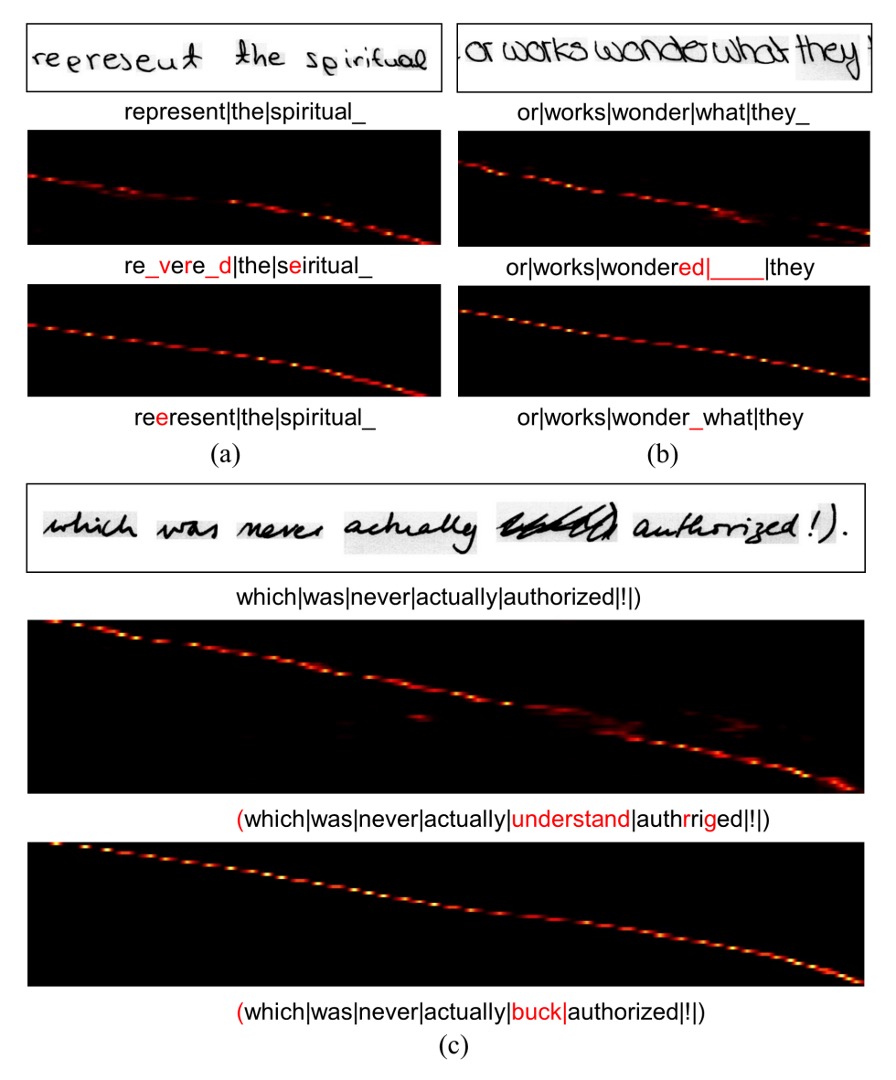
作者展示了 DAN 的錯誤範例,如上圖:
- (a):字元「e」被錯誤辨識為「p」,原因是手寫風格讓兩者難以區分。即使對人類而言,若無上下文也難以判斷。
- (b):由於兩個單詞之間的距離過近,導致辨識器忽略了空格符號。
- (c):一些雜訊紋理被 DAN 錯誤辨識為文字。
DAN 在這些錯誤案例中仍展現出比傳統注意力機制更強的強健性,在雜訊干擾的情況下,傳統注意力容易出現不可預測的錯誤,因為對齊操作被干擾。而 DAN 即使產生額外結果,也能保持對齊的穩定性。
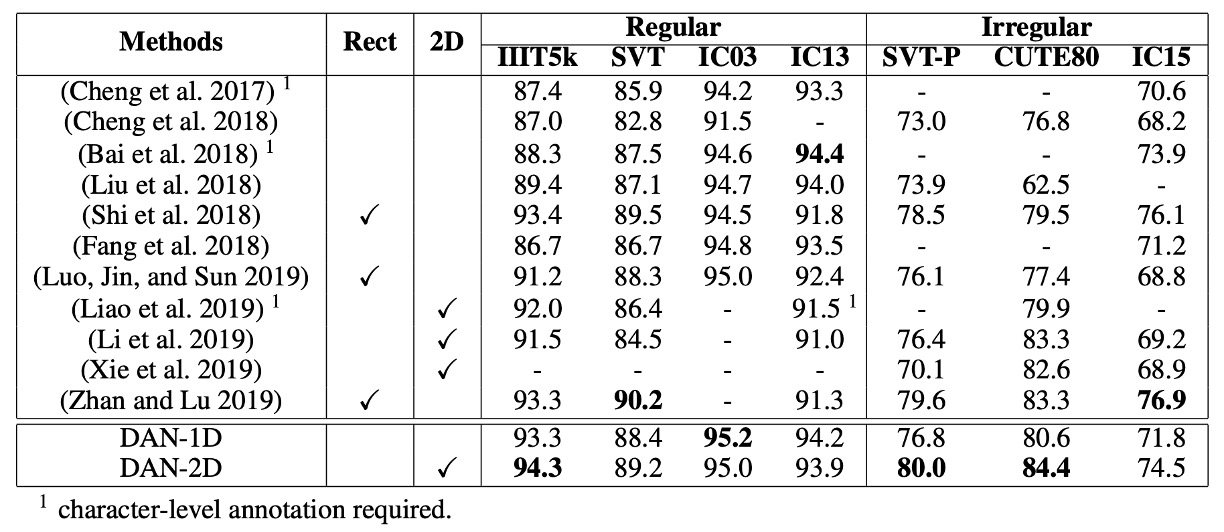
場景文字辨識性能
-
規則場景文字辨識:
- 在 IIIT5K 和 IC03 上,DAN 達到最新的 SOTA 性能。
- 在 SVT 和 IC13 上,DAN 與 SOTA 模型表現相近,略有差距。
- DAN-1D 在 IC03 和 IC13 上表現更佳,因為這些資料集的影像乾淨且規則。
-
不規則場景文字辨識:
- DAN-2D 在 SVT-P 和 CUTE80 上達到 SOTA 性能,並且在 2D 模型中表現最佳。
穩健性研究

作者在 IIIT5K 和 IC13 資料集上進行擾動測試,並將 DAN 與 CA-FCN 比較。
上表中作者使用了多種不同的擾動策略:
- IIIT-p:將影像垂直和水平各填充 10% 的高度和寬度。
- IIIT-r-p:
- 隨機放大影像的四個頂點(最大至 20%)。
- 使用邊界像素填充成四邊形影像,並轉回對齊的矩形影像。
- IC13-ex:在裁剪前將文字框擴展 10%。
- IC13-r-ex:隨機將文字框放大(最大 20%),並裁剪為矩形影像。
從結果可以看出 DAN 在大多數情況下表現比 CA-FCN 更穩定,藉此證明了 DAN 的強健性。
結論
作者從一開始就明確的指出了注意力圖的問題,並提出了解耦式的解決方案。
DAN 在文字辨識任務中展現了其獨特的價值,憑藉其靈活性、穩健性及高性能,成為解決對齊錯誤的一個有效工具。雖然 DAN 在面對紋理相近的雜訊時仍有改善空間,但其簡單的架構和無需詞典的設計,讓它在各類文字辨識任務中都能達到良好的效果。
如果今天要解碼()的長度非常長,解耦式的注意力圖可能會消耗非常多的資源,這時候就需要考慮一下模型的效能問題。但大部分的應用場景, 通常不會太長,所以問題不大。