[19.04] SKU-110K

擁擠的貨架
Precise Detection in Densely Packed Scenes
這篇也是比較早期的文獻。
不過這篇論文留下的 Benchmark 仍然是目前最常用的零售商品檢測資料集之一。
定義問題
現今的物件偵測技術已在自然場景中展現極高準確率與速度,但當面對密集排列、物件相似且相互緊鄰的情境時,主流方法卻顯得力不從心。
這類「高密度場景」實際上極為常見,例如:零售通路中的貨架陳列、都市交通監控畫面或是室內倉儲或堆疊環境都是如此。
這些場景通常具有幾個顯著特徵:
- 物件數量極多,排列緊密,甚至相互遮蔽。
- 外觀高度相似,難以區分邊界。
傳統物件偵測方法,如 Faster R-CNN、YOLO、RetinaNet 等架構,在自然場景中表現優異,但多數仍依賴後處理階段的 NMS(Non-Maximum Suppression) 去消除重疊框,這種硬式抑制策略在密集場景下表現出明顯瓶頸。例如:同一個實體物件可能會被切成數個小框,反之也可能多個相鄰物件被誤判為單一實體。
雖然過去已有研究提出各種替代方案,如 Mean-Shift、Agglomerative clustering 或是可學習的 NMS 層(如 GossipNet),但多數方法不是計算量過高,就是難以真正取代傳統 NMS,尤其在高密度、外觀相近的物件情境中仍容易失效。
此外,目前主流資料集(如 COCO、VOC、Open Images)主要收錄自然場景,對於這類「密集、相似、重疊」的特殊場景缺乏良好標準。即便是強調人群或車輛擁擠的 CARPK、PUCPR+,在品項密度與分類難度上都遠不及實際零售環境。
那麼,當面對這些「擠在一起、長得一樣、數量又多」的場景時,深度學習模型該如何才能準確地分辨每一個個體,並且同時保持高效與穩定?
我們能否找到一種方式,讓模型「知道自己框得有多準」?
本篇論文的作者認為:不如我們先從 Soft-IoU 開始吧。
解決問題
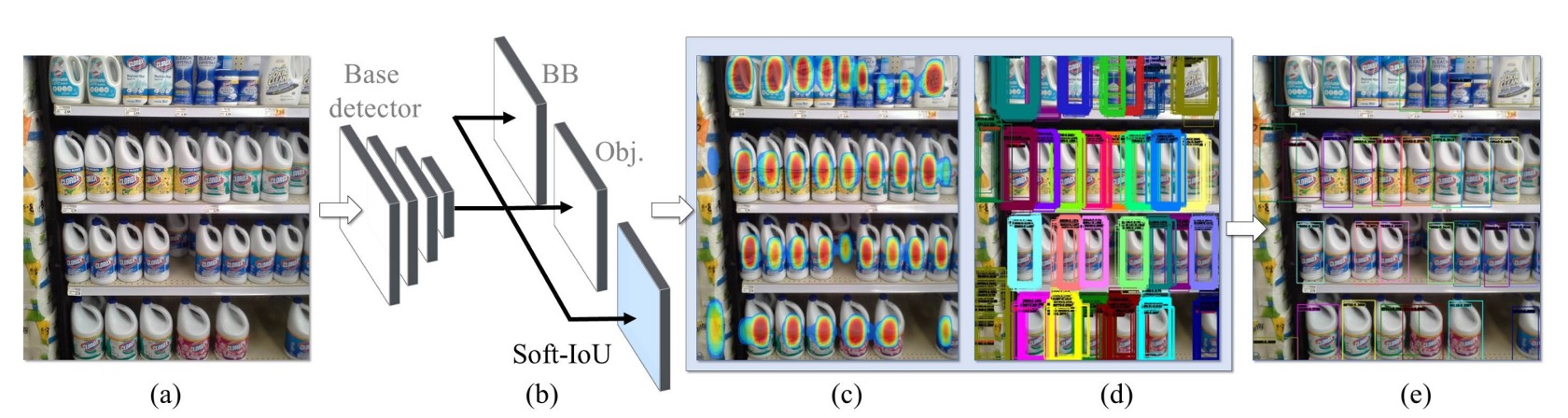
這篇論文主要的對標對象是 RetinaNet,因為它在密集場景下的表現已經相當不錯,但仍有改進空間。作者在標準的偵測架構上進行兩項擴充:
- 導入 Soft-IoU 預測層:讓模型知道「這個框和真實框重疊多少」;
- 提出 EM-Merger 推論單元:將多個偵測框轉換為高斯分布,透過機率聚類消解重疊。
這兩個設計協同作用,最終產出密集場景下更穩定、非重疊的偵測結果。
基礎架構
作者以 ResNet-50 為骨幹,構建一個具備三層上採樣的 FPN,產生多尺度特徵圖。
每個 RPN 具有三個全卷積輸出頭:
- 偵測頭:回歸 bounding box 的中心與寬高:
- 分類頭:預測物件存在的信心值
- Soft-IoU 頭:預測該框與真實物件的重疊程度
為避免訓練 Soft-IoU 時引入太多雜訊,分類分數低於 0.1 的候選框會被過濾。
Soft-IoU
在非擁擠場景中,只靠 objectness score + NMS 通常已足夠。但在密集場景下,多個高信心框可能對應不同物件,也可能只是遮蔽造成的誤檢,因此我們需要更細緻的「重疊品質指標」。
Soft-IoU 就是為此而設計的,它預測每個框與 ground truth 框的 IoU 分數。對於每個偵測框 ,我們先找出與它最近的標註框 ,然後計算:
若兩框無交集則 IoU 設為 0。
這個值作為 ground truth 來訓練 Soft-IoU 預測層,其損失函數為 binary cross-entropy:
總體 loss 定義為三者加總:
其中前兩者為常見的分類與回歸損失。
比較特別的地方是 objectness 預測的是「有沒有物件」,而 Soft-IoU 預測的是「這個框有多準」。因此,即使某框只有部分覆蓋物件,也可能有高 objectness 分數,但其 Soft-IoU 應該較低。這兩者呈現互補訊號。
EM-Merger
透過 Soft-IoU,每個偵測框都有兩個信心值:
- :是否有物件
- :有多準確
問題來了,這些框可能彼此重疊、聚集成簇。
我們該如何從這些重疊的候選中,精準找出每一個物件?
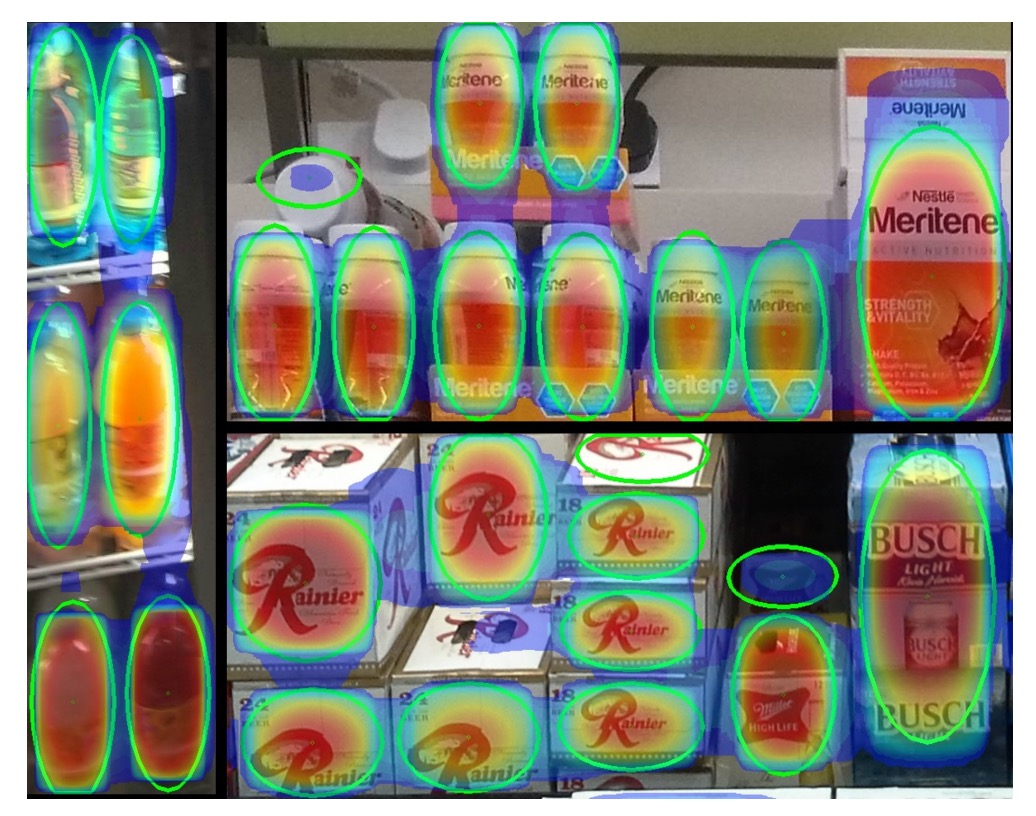
作者的解法是將每個偵測框視為一個2D 高斯分布:
其中:
- 均值 :框中心;
- 共變異數 :反映框的尺寸。
然後這些高斯會組成一個混合模型(MoG):
這表示在每個像素位置 ,我們可以根據 Soft-IoU 權重評估其為物件中心的可能性。
接著只要將這個 MoG 縮減為較少的、高信心的 個高斯 ,作為真正的物件偵測結果。目標是讓新的高斯混合 能夠逼近原始分布 ,並最小化下式:
其中 KL 表示 Kullback–Leibler divergence。
這個最小化問題透過 Expectation-Maximization(EM)解決:
-
E 步驟:將每個偵測框指派給最近的群(以 KL divergence 判定)
-
M 步驟:重新估計每個群的參數
重複進行直到收斂(通常 10 次內),即完成密集物件的聚類解析。
最後,對每個聚類中心套上兩倍標準差的橢圓,尋找落在其內的原始偵測框集合,並取其中寬高的中位數作為最後的偵測框。
這就是整體系統的推論流程:Soft-IoU 做為品質預測 → MoG 表達空間機率 → EM 聚類出清晰框組 → 避免誤殺真實物件,也不會產生重疊偵測。
SKU-110K 資料集與基準建構
密集偵測之所以缺乏突破,部分原因來自缺乏針對此任務設計的高品質資料集。
為此,作者打造了全新資料集 SKU-110K,專門針對零售通路中的貨架環境,從設計動機到標註品質,皆針對高密度場景所需特性進行規劃。
資料集圖像蒐集自美國、歐洲、東亞等數千家實體門市,由數十位拍攝人員以個人手機攝影,確保圖像呈現自然、非刻意安排的真實陳列狀態。
- 每張原始圖像解析度至少為 5MP,後壓縮至 1MP JPEG;
- 未規範拍攝設備與角度,保留自然光線、模糊、遮蔽等現實干擾;
- 標註作業由熟練專職人員執行,非透過群眾外包,進一步提升標註的精確度與一致性;
- 所有圖像與標註經人工複檢,過濾明顯誤標錯框。
資料集統計與分割
SKU-110K 共含三個子集,並保證來自同一店家的貨架不會同時出現在多個子集中:
| 資料集 | 圖像數 | 框數 | 比例 |
|---|---|---|---|
| 訓練集 | 8,233 | 1,210,431 | 70% |
| 驗證集 | 588 | 90,968 | 5% |
| 測試集 | 2,941 | 432,312 | 25% |
相較於 MS COCO、OpenImages 等資料集,每張圖含有的物件數量提升一至三個數量級,是「真正高密度場景的挑戰」。
評估指標與準則
主要評估準則依循 COCO 標準,包括:
- AP@[.50:.95]:主挑戰指標;
- AP@.75:嚴格定位準確率;
- AR@300:限制 300 預測數量下的平均召回率;
- PR@0.5 (IoU=0.75):在 50% recall 時的精確率樣本點。
此外,為兼顧「偵測」與「計數」任務的表現,作者引入如下誤差衡量指標:
-
MAE(Mean Absolute Error)
-
RMSE(Root Mean Squared Error)
其中 為模型預測該圖像內的物件數, 為實際標註值。
這個資料集設計上兼顧了高密度、多類別、精細差異與真實干擾,是少數可針對擁擠場景進行嚴謹評估的 benchmark。
討論
推論速度分析
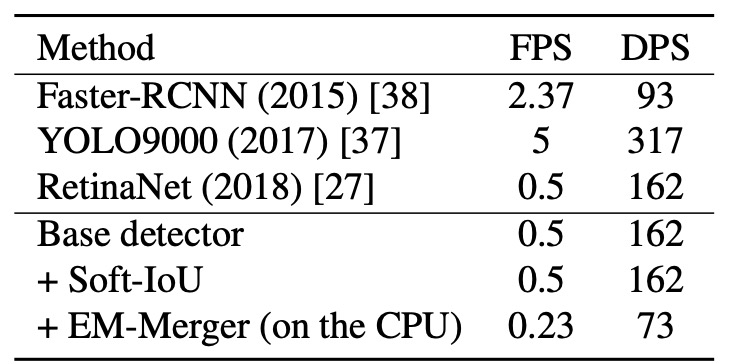
為檢驗模型的部署可行性,作者於相同硬體(Intel i7-5930K + GTX Titan X)上測量平均推論效能,指標為:
- FPS(Frame per Second):每秒可處理的圖像張數;
- DPS(Detection per Second):每秒可偵測的物件數量。
實驗結果如上表所示:
- Base Detector(RetinaNet 同構):推論速度為基準;
- 加入 Soft-IoU Layer:不影響速度,因其為純卷積結構;
- EM-Merger:速度下降顯著,主因為 CPU 與 GPU 間頻繁資料交換;
雖然 EM-Merger 在現階段較慢,但準確率大幅提升,顯示其效能值得部署端優化努力。作者指出若移至 GPU 實作,速度應可顯著改善。
偵測與計數實驗
作者設計數種比較與消融組合,如下:
- Monkey:隨機擲點模擬,作為 lower bound;
- Base & NMS:基本架構 + 傳統 NMS;
- Soft-IoU & NMS:以 Soft-IoU 分數作為 NMS 準則;
- Base & EM-Merger:保留原始 objectness,僅使用 EM 聚類;
- Full System(本論文方法):Soft-IoU + EM-Merger。
偵測表現如下表:
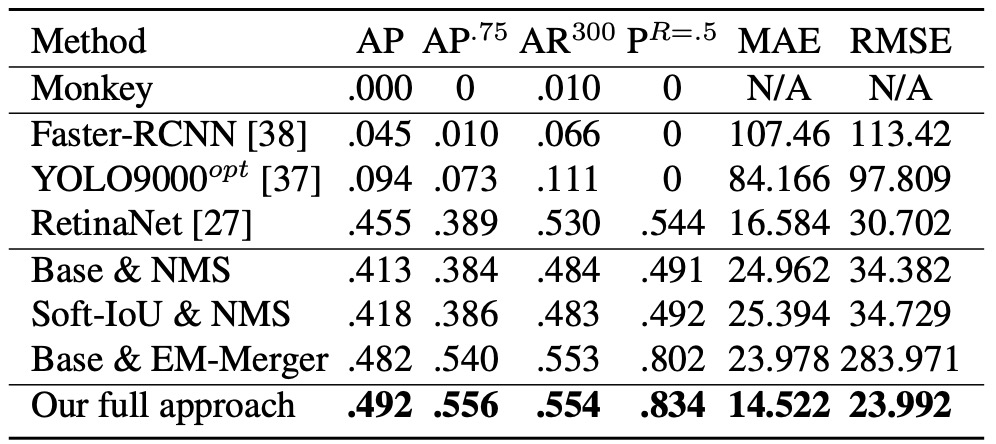
- Monkey 幾乎無效,證明僅靠密度不夠;
- Faster R-CNN / YOLO9000opt 難以處理 50+ 物件的場景,表現不佳;
- RetinaNet 表現相對穩定,並且略優於作者的 Base 架構;
本論文提出的方法在所有指標(AP@.5–.95、AP@.75、AR@300)上均顯著超越所有 baseline。
針對計數準確度的部分(看上圖表的 MAE 和 RMSE),將每張圖像預測物件數 與真實值 相比,雖然 RetinaNet 偵測 AP 接近,但其 NMS 導致重複框與漏偵嚴重,造成計數誤差遠高於本方法。
這表示 Soft-IoU 提供更好的候選評估標準,而 EM-Merger 可有效分離擁擠區域,兩者合力使得計數穩定性大幅提升。
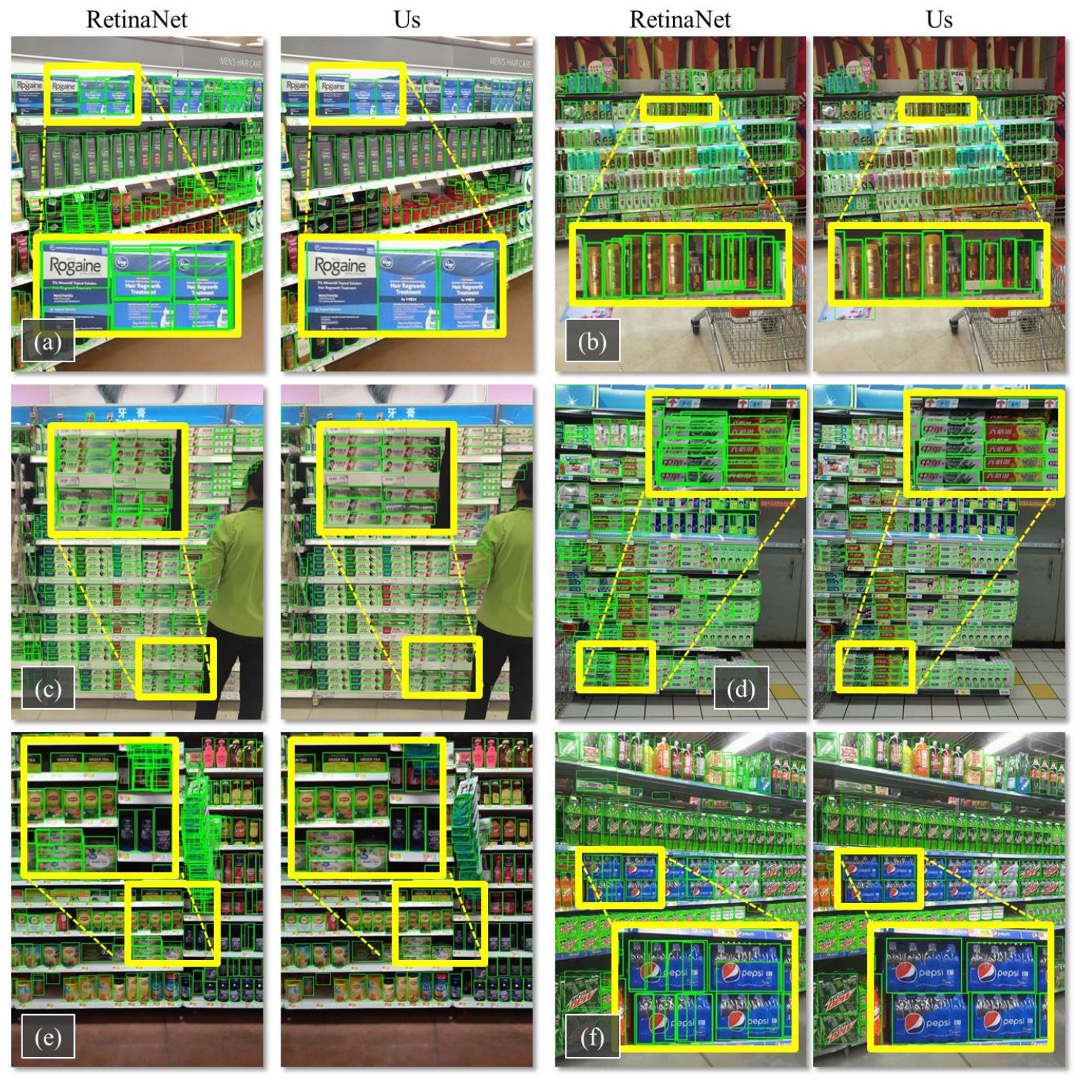
下圖是本論文的方法和 RetinaNet 在 SKU-110K 測試集上的偵測結果,相比之下,本方法成功消除重疊,幾乎每個物件只產生一個檢測框。
在 CARPK 與 PUCPR+ 上的泛化實驗
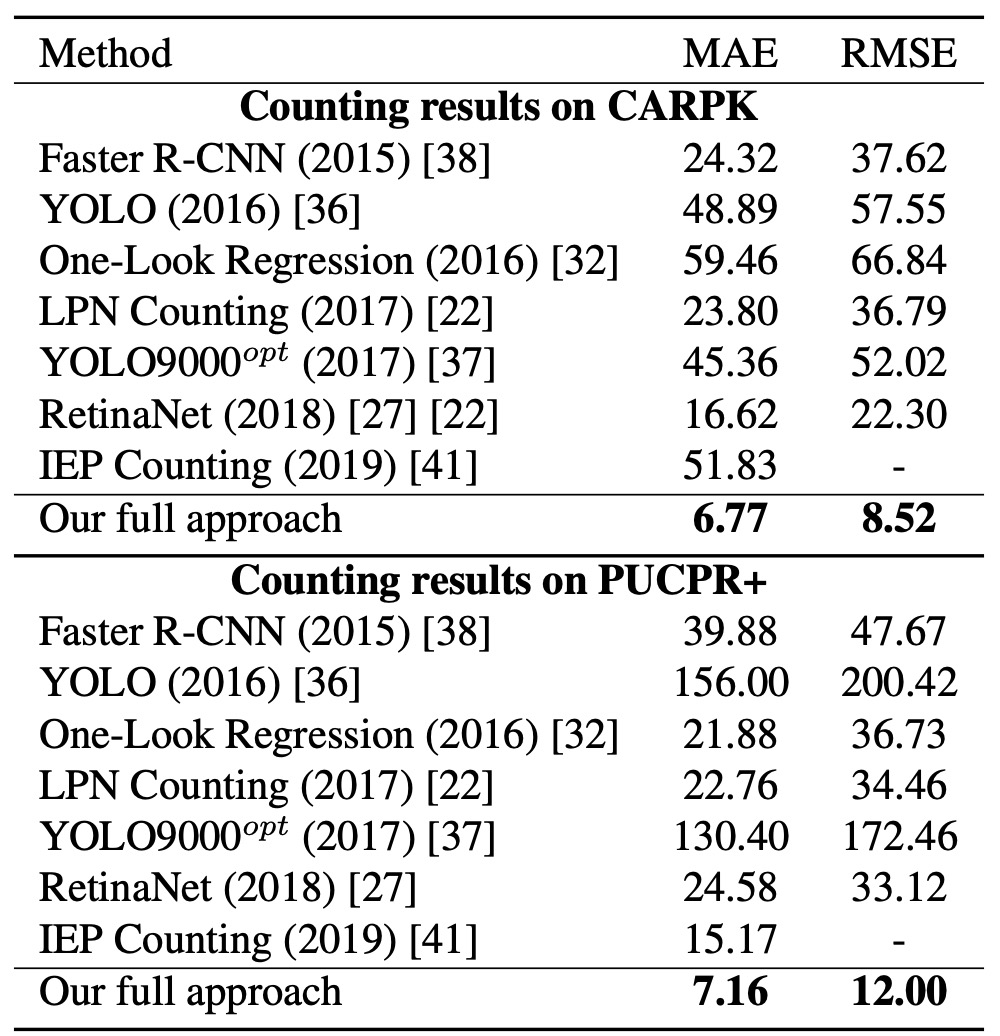
為了驗證本方法的泛化能力,作者將其應用於兩個車輛計數資料集:CARPK 與 PUCPR+。
實驗結果顯示,就算本方法並非專為車輛計數設計,仍能在這兩個資料集上達到優異表現,在 MAE 與 RMSE 上均優於其他方法。
結論
本研究提出的 Soft-IoU 層與 EM-Merger 模組,針對密集場景下的重疊框問題提供了具體工程解法。前者補足了 objectness 無法衡量邊界精度的盲點,後者則以機率聚類取代傳統 NMS,提升定位清晰度與去重效果。
在 SKU-110K 上,本方法在偵測與計數兩項指標皆優於同時期的主流架構,顯示其設計確實有效。然而,從現今角度回看,其主要限制包括:
- 未支援多類別偵測,難以直接應用於複雜場景;
- EM-Merger 難以部署於即時系統,推論速度仍有優化空間;
- 未結合語義資訊,對細粒度外觀變異仍易混淆。
儘管本方法已發表多年,其在「密集物件偵測」這一領域的貢獻至今仍具參考價值。尤其 SKU-110K 所代表的極端擁擠場景,在今日許多場域(如自助結帳、智慧倉儲、交通監控)中依然常見,仍可作為評測模型泛化能力的良好基準。