[20.11] DPSNet

結帳桌上的蒸餾
Iterative Knowledge Distillation for Automatic Check-Out
零售商品這個領域下也分了幾個分支,其中一個就是自動結帳。
自動結帳的全名是 Automatic Check-Out(簡稱 ACO),我們來看看相關的論文。
定義問題
隨著零售業逐步數位轉型,系統化地辨識顧客購買的商品種類與數量,成為提升顧客體驗與降低人力成本的關鍵。不過 ACO 和典型的物件偵測任務不同,這裡的的問題結構與數據特性都和一般的物件偵測有顯著差異。
以目前規模最大的 RPC 資料集為例,訓練資料由轉盤拍攝而來,每張影像包含一件單品,從不同視角取得,背景乾淨、光照穩定;而測試資料則模擬實際結帳場景,將多件商品堆疊在白板上,由固定俯視視角拍攝,背景雜亂、遮擋嚴重、光影不一。
- 這種從「單品展示」到「堆疊場景」的 domain shift 是 ACO 任務最常遇到的問題。
除了 domain shift,ACO 的另外一個困難是資料標註資源的不對稱。
在實務應用中,模型訓練時只能依賴人工標註的圖片,而測試階段的場景複雜度卻遠高於訓練資料。即使如 RPC 資料集已提供多層次的標註,但在現實場景中,測試影像往往是「不標註」或「僅提供弱標註」的,這限制了監督學習在 ACO 領域的延展性。
有些研究嘗試使用合成數據,像是 Cycle-GAN 這類的技術來減少 domain gap 的問題,但其實效果有限,訓練資料本身仍可能存在品質問題。
資料分佈嚴重錯位、監督訊號不對等、測試場景高度遮擋且重疊密集。
本篇論文的作者,想在這些困難中,試圖找一個有效的訓練流程。
解決問題
整體模型訓練架構如上圖,面對 source domain(單品圖)與 target domain(結帳場景)間龐大的落差,作者首先提出一套「資料增強」策略,目的在於模擬真實場景、練習適應混亂。
資料增強
這個增強過程可以拆成三個階段:背景去除 → 姿態篩選 → 合成影像生成。
-
背景去除(Background Removal)
RPC 資料集中,訓練圖像都是放在轉盤上拍攝的,雖然已提供邊界框,但依然保留不少背景雜訊。若直接合成這些圖片,會讓模型學到「錯誤背景」。
因此,作者使用一種粗到細(coarse-to-fine)的影像處理方法來去背:
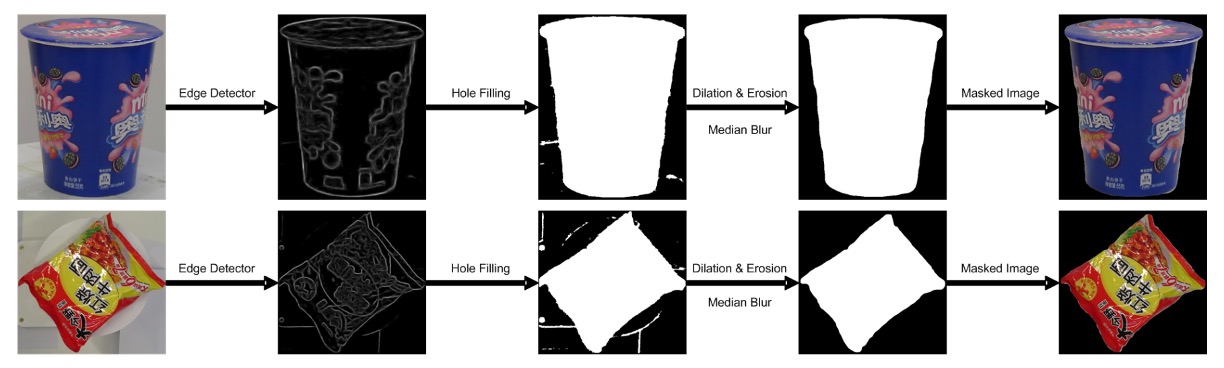
具體步驟如下:
- 邊緣偵測:使用邊緣檢測器找到物體輪廓,濾除信心度低的區塊。
- 形態學處理:使用膨脹與侵蝕操作消除雜訊、填補破碎區域。
- 邊緣平滑:以中值濾波器進一步清除鋸齒感。
- 視覺顯著模型:最後利用 saliency detection 網路(在 MSRA-B 上預訓練,並以粗遮罩微調)生成乾淨物體遮罩。
這樣一來,原本含有背景與轉盤的影像就變成乾淨的商品圖像,可用來後續生成訓練樣本。
-
姿態篩選(Pose Pruning)
不是所有單品姿態都適合放進 checkout 場景。例如:一個寶特瓶如果是「由下往上拍」的視角,那在結帳畫面中是非常不自然的。
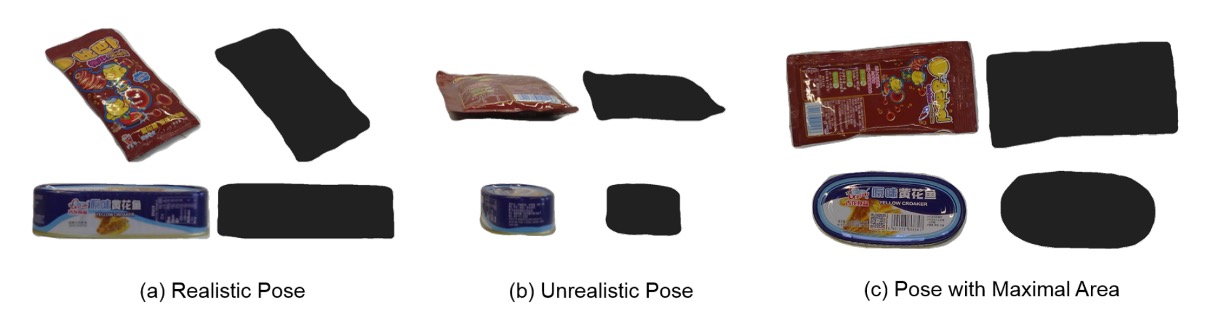
為了自動挑選「合理姿態」,作者設計了一個簡單但實用的指標:
- :第 類商品在第 個視角下的遮罩面積。
- 若某視角下的遮罩面積太小,代表該姿態與自然放置角度落差大 → 剔除。
只有通過此門檻(大於某閾值 θₘ)的姿態,才會被留下來參與合成。
-
結帳場景合成(Checkout Image Synthesis)
當我們手上已有乾淨遮罩 + 合理姿態,接下來就是合成模擬場景。
操作方式如下:
- 隨機放置多個商品:從經過篩選的商品中選出數個,以隨機角度(0–360°)與隨機縮放(0.4–0.7)貼到乾淨背景上。
- 避免過度遮擋:每個商品最多被遮蔽 50%。
- 光影處理:雖然合成圖位置合理,但仍缺乏真實世界中的光影變化。因此,最後使用 CycleGAN 技術對圖像進行風格轉換,使其更接近實際測試畫面。
下圖展示了整個轉換過程:

DPSNet
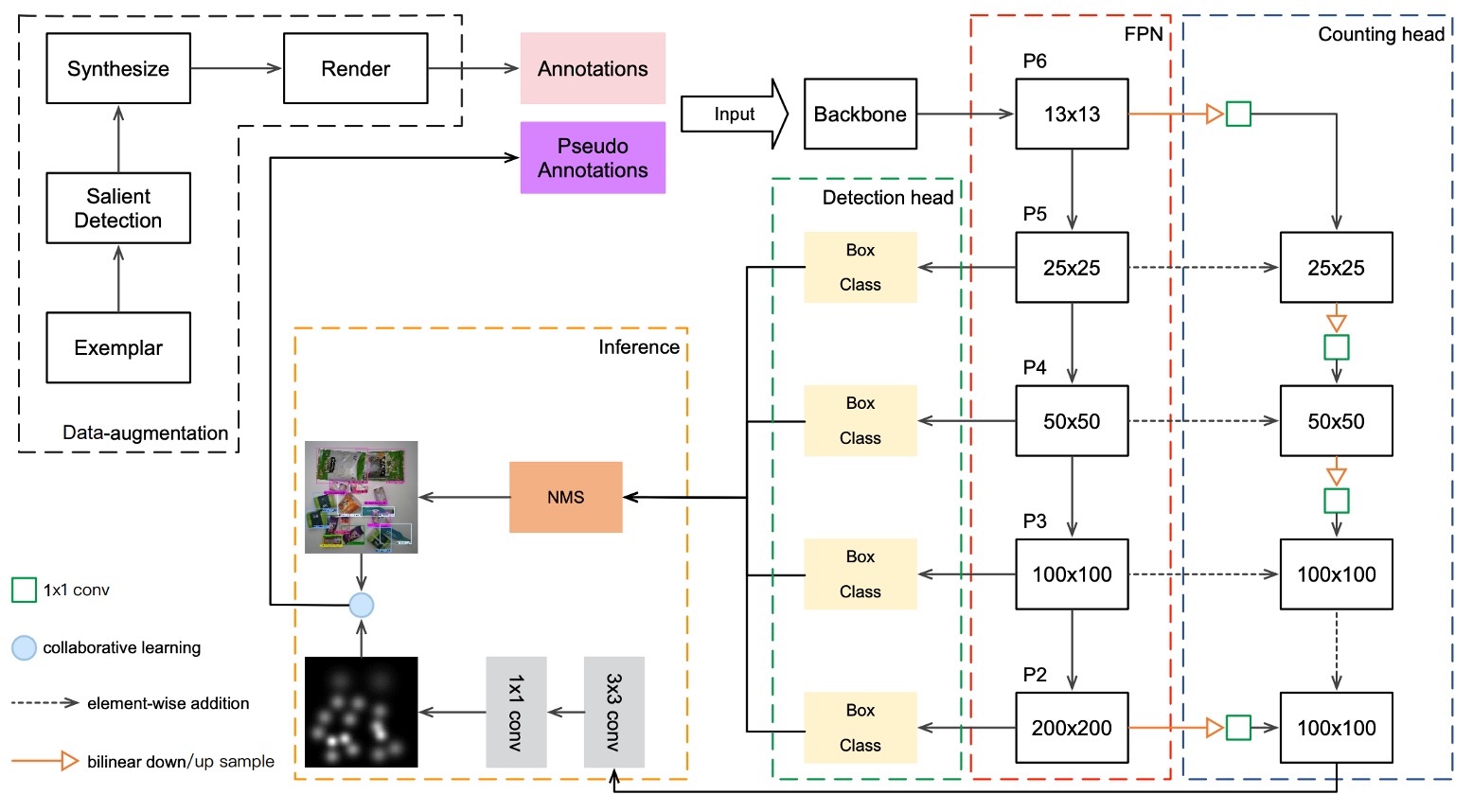
前面透過資料增強,模型獲得了初步模擬真實結帳畫面的能力,但這仍不足以彌補與真實測試影像間的語意落差。作者提出一種名為 DPSNet(Dual Pyramid Scale Network) 的模型架構,試圖從兩種不同觀點中學習共通特徵表示:
- 物件偵測(Detection)
- 物件計數(Counting)
首先是 Detection View,目標是找出物件在哪裡。偵測視角輸出的是一組物件框,形式為 (c, x, y, w, h),其中:
- c:物件類別
- x, y:物件中心點座標
- w, h:物件寬高
這是典型的物件偵測任務輸出,提供物件的空間定位與分類。
另外 Counting View 的目標就是計算物件有幾個,輸出的是一張密度圖,每個位置 會對應一個大小為 的向量,表示該位置屬於每一類的機率密度。這類輸出形式對遮蔽嚴重或疊放商品的情境特別有利。
為了讓兩個視角都能利用不同層級的特徵,DPSNet 採用 FPN(Feature Pyramid Network) 為 backbone,取得多層次特徵圖 。
特徵融合方式如下:
- 低層特徵上採樣,與高層融合(為偵測保留空間細節)
- 高層特徵下採樣,與低層融合(為計數導入語意強度)
融合後的特徵圖經過 1×1 與 3×3 卷積層,各自進入 detection head 與 counting head,分別輸出偵測框與密度圖。
逐步知識蒸餾
模型雖已經具備預測能力,但仍無法保證它在 target domain 上表現穩定。
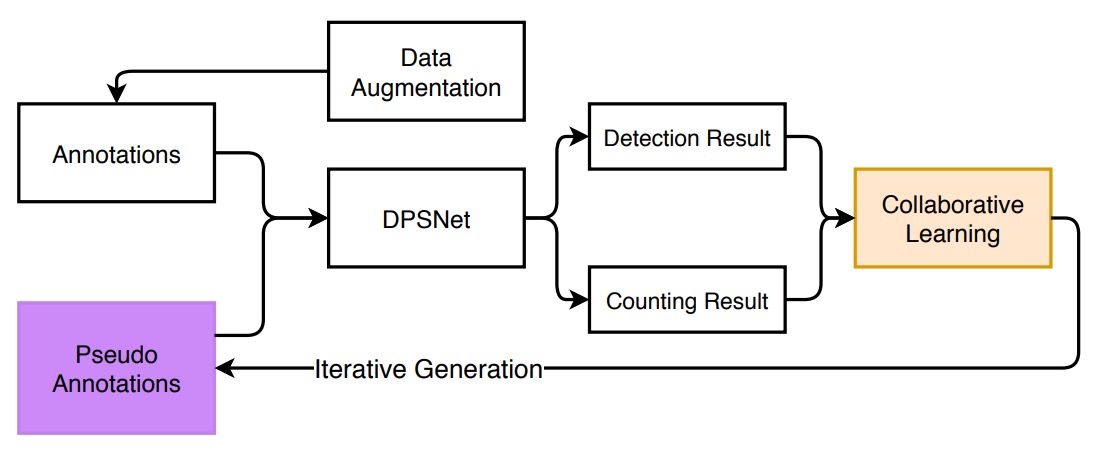
作者為了將測試資料集也納入訓練流程,設計了一套 漸進式的自我蒸餾訓練策略,如下圖所示:
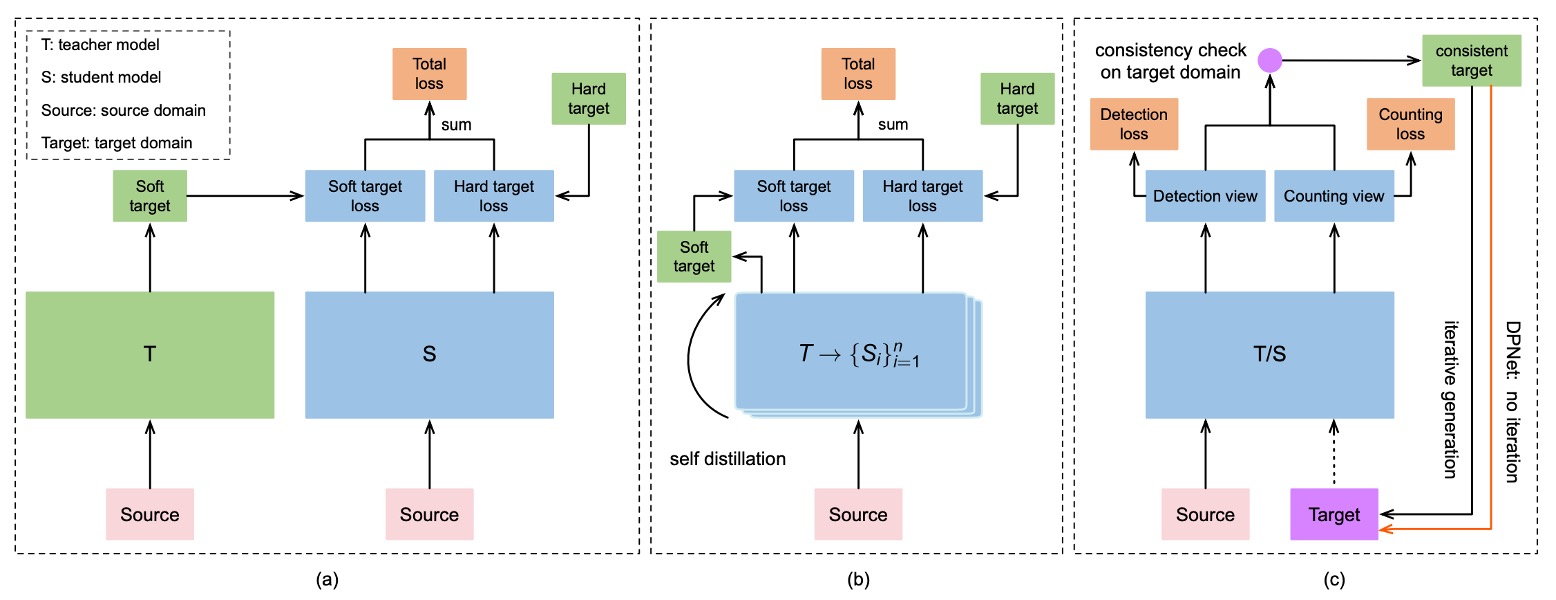
整體流程如下:
-
一致性檢查(Consistency Check)
對於每張無標註的測試圖像,DPSNet 會執行:
- 偵測視角 D:預測出物件位置與類別
- 計數視角 C:產生密度圖,估計每類商品的總數
接著,比較兩者是否「一致」:
- 若某類別 c,偵測出來的高信心物件數量等於密度圖估計的數量,則視為「一致」
- 將這些「一致樣本」加入訓練資料,並生成 pseudo labels
-
反覆蒸餾(Iterative Distillation)
在每次訓練週期中,DPSNet 都會:
- 使用目前模型預測測試集
- 執行一致性檢查 → 挑選可信樣本 → 加入訓練
- 用這批新 pseudo labels 再訓練一輪
- 重複此流程數次
-
實例級修補(Instance-Level Refinement)
最後,在完成數輪蒸餾後,作者額外加入一個修補步驟:
- 對於那些「整張圖被捨棄」的影像,如果其中有些物件信心值高,就保留這些物件框,丟棄低信心部分。
- 再利用這些修補後的「半可信」圖像進行 fine-tuning。
下圖展示了三種常見被捨棄的例子:
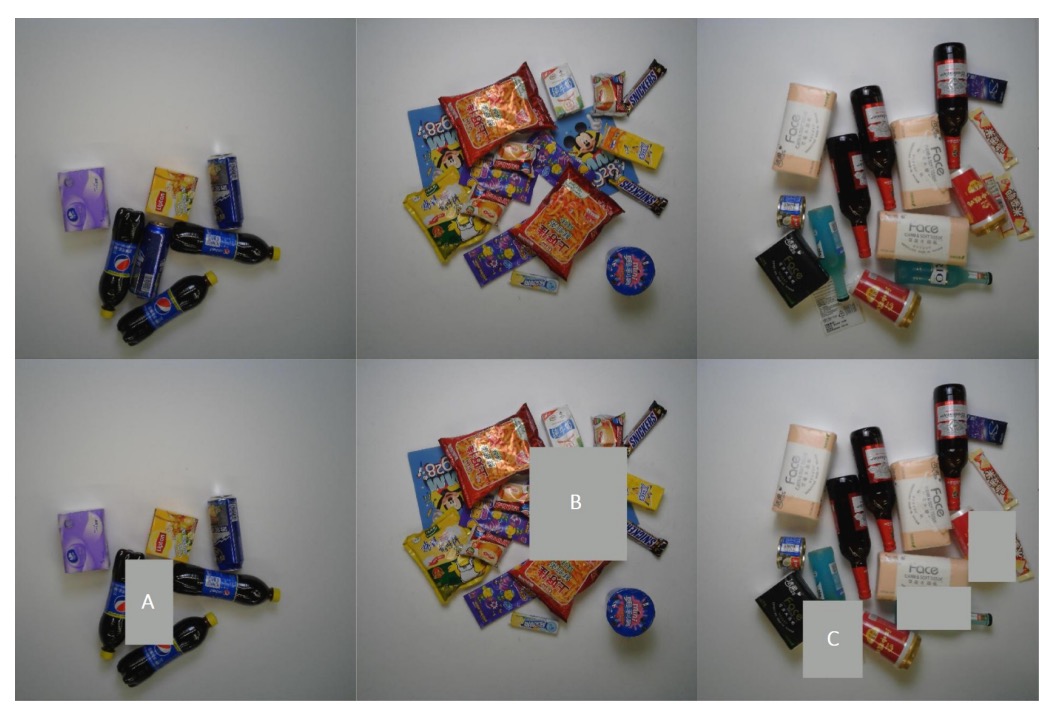
每列依序為:原始結帳影像、移除低信心物件後的影像。A/B/C 分別代表三類常見的無效預測:A 類為外觀相近的重複物件、B 類為被遮擋的物件、C 類為非商品項目。
透過「一致性 → 蒸餾 → 修補」的連續迭代,知識自 source domain 滲透至 target domain,同時在影像級與實例級均獲得漸進式強化,最終提升模型在實測場景的表現穩定度。
損失函數
為了讓 DPSNet 能穩定學習來自不同 domain 的資訊,在迭代訓練的過程中,作者為兩個視角分別設計了損失函數,並加總為整體訓練目標。
損失函數總覽如下:
計數視角的目標是學出一張密度圖 ,對應每一類商品在圖中每個位置出現的可能性。
- 損失類型:平方歐式距離(L2 Loss)
- 直覺意義:預測的密度圖越接近實際密度分布,模型越能正確推估每一類商品的數量。
密度圖的 ground-truth 建立方式為:
- 先以每個物件的中心點位置建立高斯核(Gaussian Kernel)
- 每一類商品的高斯分布獨立相加,產生對應的類別密度圖
- 所有類別合成為最終密度圖(尺寸為輸入圖的 1/8,例如 100×100)
偵測視角的目標是為每一個物件預測其類別與邊界框位置:
- 分類損失(Cross-Entropy):預測類別 與標註類別 間的誤差。
- 回歸損失(Smooth L1):只對真正物件(即 )計算邊界框位置的誤差。
用到的條件指標函數 意味著:
- 物件(foreground):有標註類別,需同時計算分類與回歸誤差。
- 背景(background):不進行回歸,僅考慮是否被錯判為某類商品。
此處使用的回歸向量 、 代表邊界框的參數化座標(例如中心點與寬高),而 Smooth L1 損失能在小誤差下保有穩定梯度,提升訓練穩定性。
討論
RPC dataset benchmark
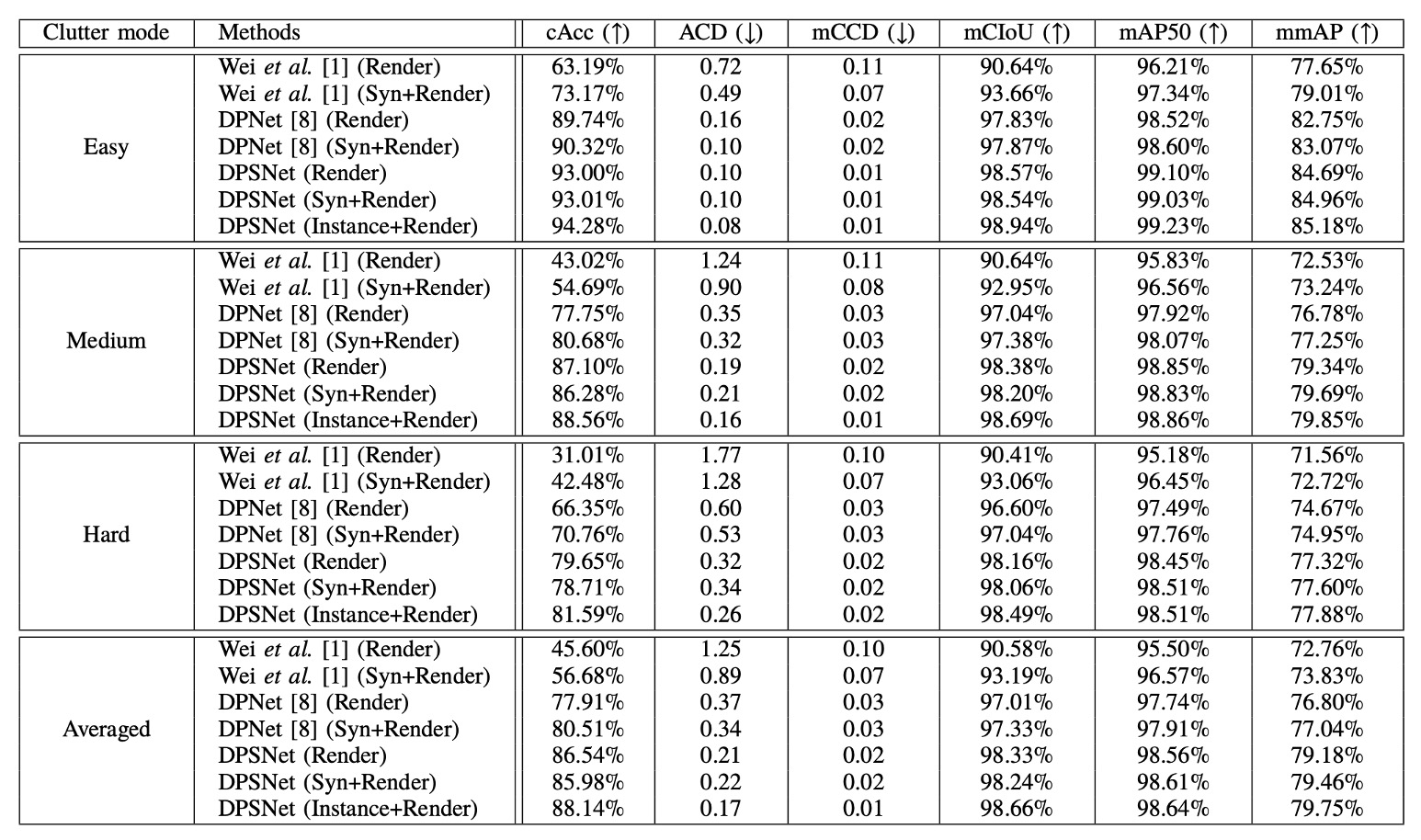
DPSNet 的實驗結果被詳細整理於上表,並與兩個基線方法比較:參考文獻【1】是提出的原始結帳偵測系統的論文;參考文獻【8】是後續改進的 DPNet。
這篇論文也沒有說明是他們是用 ResNet-50 還是 ResNet-101。
在另外一篇 DPNet 論文中有提到在比較中使用的架構是 ResNet-101,所以這裡我們假設他們也是用 ResNet-101。
每個方法都經歷了兩個版本的訓練資料:僅使用 CycleGAN 處理過的 Render 圖像,或額外加入 Copy-Paste 合成圖像構成的 Syn+Render 訓練集。DPSNet 額外補充了 Instance+Render 設定,用以驗證實例級 pseudo-label 在訓練中的影響力。
我們從核心指標 Checkout Accuracy(cAcc) 講起,這是一項極具現實意義的衡量準則:
- 只有當整張結帳影像中的所有商品類別與數量完全正確時,才會被視為一次「完全成功的預測」。換言之,它對錯誤極度敏感,能有效揭示模型在真實場景中的可靠性。
原始的 Render 設定只使用 CycleGAN 處理後的合成影像作為訓練來源,其 cAcc 僅有 45.60%。即使有風格轉換輔助,仍難彌合模擬與真實場景間的語意差距。
加入更多 Copy-and-Paste 合成圖像之後,Syn+Render 設定使 cAcc 提升至 56.68%。這代表訓練資料的數量與分佈豐富化,確實對模型泛化有所助益。然而,這樣的合成影像也可能引入新的雜訊,例如錯誤遮蔽、非自然姿態,甚至背景不一致問題,可能會導致「表面上更多樣,實際上更混亂」的反效果。
DPNet 的貢獻在於率先引入了 detection 與 counting 雙視角學習,並嘗試從測試資料中選取可信 pseudo-label 進行訓練。這讓它即使只用 Render 訓練,也可將 cAcc 一舉拉高至 77.91%,幾乎突破了 baseline 的天花板。
Syn+Render 設定下的 DPNet 更上層樓,達到 80.51%。可以說,這是首次證明:測試資料本身可以反過來成為知識來源,前提是你有一套挑選它們的機制。
DPSNet 相較 DPNet 有兩大進化:
- 在架構上:引入了 pyramid-scale 表示融合機制,讓偵測與計數兩視角在多層特徵上同步運作,不再只是粗略堆疊。
- 在訓練上:導入 iterative knowledge distillation,不僅逐步選出可信測試影像,更進一步在實例層級做濾除與修補。
這讓「DPSNet (Render)」的 cAcc 飆升至 86.54%,而 Syn+Render 版本雖然稍低,但差距極小。這也呼應前文所提,Copy-Paste 合成資料未必總是正向貢獻,反而可能帶來輕微的負遷移。
除了 cAcc,DPSNet 在其他衡量指標上也展現出全方位優勢:
- ACD(平均誤差數):衡量每張圖預測錯幾件商品,DPSNet 顯著低於其他方法,表示整體計數穩定。
- mCIoU(類別交集聯集):反映模型在類別預測的廣度與準確性,DPSNet 較 DPNet 提升約 5%。
- mmAP(IoU=0.50~0.95 全範圍平均精度):即使是在檢測層級嚴格標準下,DPSNet 仍勝過所有 baseline,代表不僅「有預測」,更「預測得準」。
這些指標彼此互補,描繪出 DPSNet 在 detection 與 counting 雙任務之間的整體協調與精度提升。
一個有趣的觀察是:DPSNet 在僅使用 Render 訓練時,表現甚至略優於 Syn+Render(86.54% > 85.98%)。這可能代表其 iterative pseudo-label 策略本身已能有效捕捉並內化來自真實測試場景的訊號,使得合成圖像的幫助反而邊際遞減。
這讓我們重新思考一個問題:
「真正有價值的訓練訊號,來自於大量模擬,還是來自於真實分佈的理解與篩選?」
DPSNet 的答案顯然是後者。
下圖是基於 RPC dataset 的推論結果,從上而下依序為簡單,中間與困難樣本。

消融實驗
-
密度圖維度設計
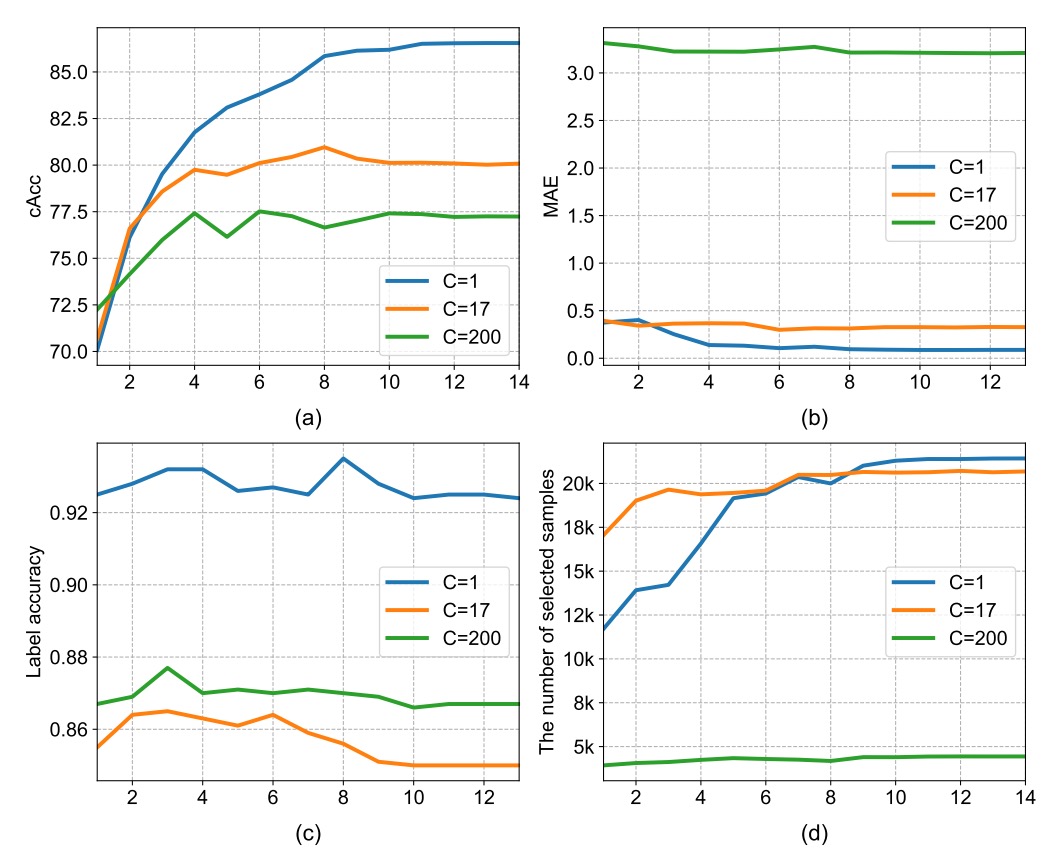
在計數視角中,密度圖的第三個維度 可視為「要同時估算幾種類別的數量」。
作者比較了以下三種設定:
Density Category (C) 說明 cAcc C = 1 所有商品視為同一類別 86.54% C = 17 使用 17 個超類別 80.05% C = 200 完整細分類別 77.22% 結果顯示:C 設定越細,模型越難收斂。
這是因為密度圖的 supervision 信號會隨著類別數增加而變稀疏,造成訓練不穩。反之,C=1 雖無法提供類別區分,但在計數與一致性檢查階段反而更穩定,因此本文最終採用 C = 1。
-
特徵表示法的影響
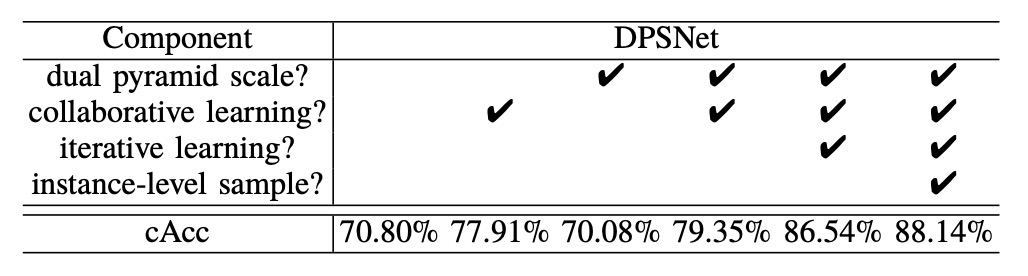
從上表可見,若僅使用 pyramid-scale 架構(無協同學習),其表現甚至低於 DPNet(70.08% < 70.80%)。這反映出:架構的進步若無對應的訓練策略支援,可能無法轉化為效果提升。
當搭配協同學習後,DPSNet 的表現才開始超越 baseline,cAcc 提升至 79.35%。這說明 pyramid-scale 設計的潛力必須透過雙視角互動學習才得以釋放。
不論是偵測(物件定位)或計數(密度估計),若各自為政,容易陷入 local optimum。例如某個商品雖被準確框住,但密度預測誤判;或反之。
將這兩者放入共享 backbone 並協同訓練,會促使兩條路徑互相修正,產生更穩健的中間特徵表示。這使得 cAcc 從 70.80% 躍升至 79.35%,證實協同學習機制的實質效益。
上表中最顯著的提升來自 iterative learning:從 79.35% 一舉提升至 86.54%。
這套流程的核心精神在於:模型不再仰賴 external label,而是透過內部一致性機制,從自身預測中提煉可信訊號,並以此反覆訓練自己。
結論
DPSNet 從 Pyramid-Scale 特徵表示、多視角協同學習,到可選的知識蒸餾與 iterative self-training,層層回應了 ACO 任務中「跨域分佈不一致」與「標註資料稀缺」這兩大核心問題。
本研究提醒我們,在缺乏大量標註的現實中,測試資料本身便是潛在訊號來源。透過穩定的 pseudo-label 策略,可逐步轉化為學習資源。此外,相較於風格轉換,跨域遷移更關鍵的是語意與結構的一致性學習;而單一任務難以覆蓋的場景,也可透過多任務設計互補實現。
從工程實作角度來看,雖然計數任務無法細緻區分語意,卻能在訓練過程中提供額外監督,有效提升整體性能,實務上值得納入考量。