[20.04] YOLOv4

模型設計顧問
YOLOv4: Optimal Speed and Accuracy of Object Detection
這篇論文走的是工業風,讀起來像是一份針對「物件偵測」模型的使用說明書。
我們就從整體設計開始,來學習一下該如何做好一個物件偵測模型。
YOLO 模型的原始作者只做到 v3,而後都是其他流派的繼承者,因此後續的編號之間不一定存在關聯,發表年份也沒有嚴格先後順序。
YOLOv4 是來自臺灣的開發團隊。
模型的架構觀
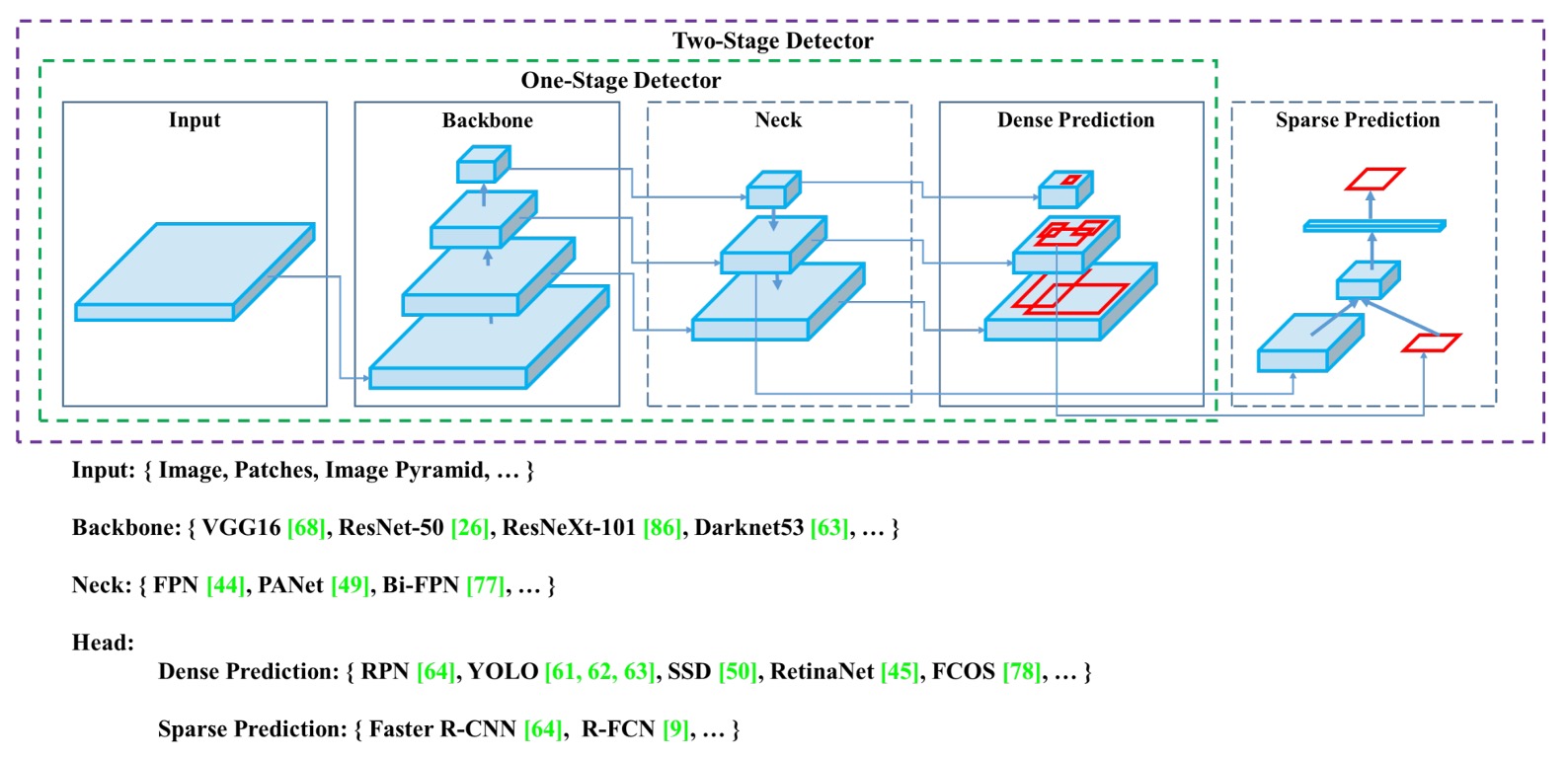
一個物件偵測器,通常包含四個主要模組:Input、Backbone、Neck、Head。
每一段都各司其職,彼此銜接又能自由組合,就像堆積木一樣。
-
Input
除了單純的圖像輸入之外,還可能加入各種強化訊號,像是多尺度影像金字塔、資料增強、圖像裁切(patching)或改變解析度,目的是從輸入端就強化模型對目標的識別能力。
-
Backbone
主要的特徵提取模組,多數來自影像分類的經典架構,如 VGG、ResNet、DenseNet,也有為偵測任務量身打造的 CSPDarknet、DetNet 等變形版本。目標是將輸入影像轉換為具備語意與視覺資訊的深層特徵圖。
-
Neck
試圖整合來自不同層級的特徵圖,平衡淺層的定位資訊與深層的語意特徵。從 FPN 到 PAN,再到 BiFPN、NAS-FPN,每一代設計都力求資訊流的更佳融合與傳遞效率。
-
Head
最終進行分類與框選的模組,區分為密集預測(如 YOLO、SSD)與稀疏預測(如 R-CNN 系列)兩大類,也正是效能與精度的主要戰場。
兩個設計路線
物件偵測架構在發展過程中,逐漸分化為兩種主流策略:雙階段與單階段。
- 雙階段架構(Two-stage),如 Faster R-CNN、Libra R-CNN 等,先產生候選區域(Region Proposals),再進行分類與邊界框回歸。這種方法具備較高的精度與較強的區域建模能力,適合需要精確偵測的任務。後續也出現如 RepPoints 的 anchor-free 版本,以緩解錨點設計的限制。
- 單階段架構(One-stage),如 YOLO、SSD、RetinaNet,則直接對整張圖進行密集預測,不經候選區域產生,換取更高的效率與更快的推論速度。這類方法隨著 anchor-free 設計(如 CenterNet、FCOS、CornerNet)的出現,也開始挑戰過往雙階段架構的精度優勢。
這兩條路線的分歧,其實體現了「速度」與「精度」之間的權衡,而 YOLOv4 的設計就是試圖在這條光譜上取得最佳平衡點。
特徵融合的 Neck
隨著 Backbone 的深度與廣度提升,如何有效整合多層次特徵成為後續預測的關鍵。
這就是 Neck 模組的設計初衷,也就是為了讓語意資訊與定位資訊互補融合,為 Head 提供兼具語意與空間細節的輸入。一些常見的方式像是:
- FPN(Feature Pyramid Network)開創 top-down 融合結構,逐層上採樣並融合高層語意訊號。
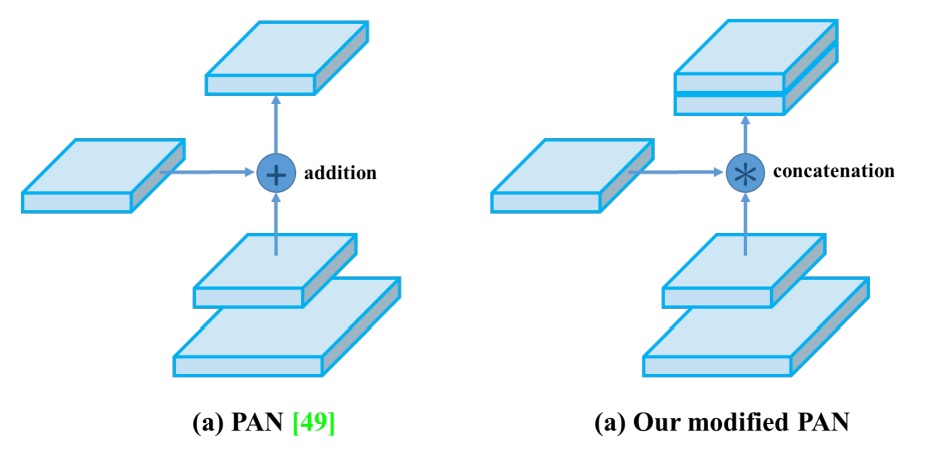
- PAN(Path Aggregation Network)則補上 bottom-up 路徑,增強淺層資訊的反饋能力。
- BiFPN / NAS-FPN 進一步追求效率與效能的極致,以可學習權重的雙向融合與 NAS 尋找最優配置。
- ASPP / RFB / SAM 這類模組則透過空間金字塔、感受野設計或注意力機制來強化特徵表徵能力。
這些設計背後的核心問題是:如何在不過度犧牲速度的前提下,提升多尺度理解與特徵表達能力。
為偵測而生的 Backbone
在模型設計邁向模組化、可替換的同時,也有研究者回頭從骨幹網路本身出發,重新設計專屬於物件偵測任務的特徵提取器。
- DetNet 與 DetNAS 開始將分類導向的主幹改為偵測導向,注重保持高解析度與偵測感知能力。
- SpineNet 強調資料流動的多樣性與特徵組合的靈活性,結合 NAS 尋找最佳網路配置。
- HitDetector 則直接從任務需求出發,規劃從輸入到預測的整體設計,使各模組協同發揮效益。
這個方向的發展,意味著任務需求從影像分類轉向定位與框選,光是套用分類架構已無法滿足偵測的複雜性,因此從骨幹重新設計可能是更高效的解決方案。
訓練優化技巧
在物件偵測的訓練過程中,有一類技巧被統稱為「Bag of Freebies」。
意思指的是那些「只會增加訓練成本,而不會影響推論效能的技術」。換句話說,它們的存在目的是在不影響推論速度的前提下,提高模型的準確度與泛化能力。
這類技巧可以分成三大類型:資料增強、標籤處理,以及損失函數的優化。
資料增強
物件偵測模型的泛化能力,很大程度取決於輸入資料的多樣性。為了讓模型能夠適應不同環境下的影像輸入,資料增強成為最常見且有效的策略。
- 像素層級變化:包括亮度、對比、飽和度、色相與雜訊等光度失真,以及隨機縮放、裁切、翻轉、旋轉等幾何變換,這些方法保留了原始像素資訊,僅僅改變了其排列與視覺呈現。
- 遮蔽式增強:為了模擬遮擋場景,像是 Random Erase、CutOut、Hide-and-Seek 與 GridMask 等方法會隨機遮蔽影像區域,讓模型學習在遮擋情境下也能辨識目標。
- 特徵遮蔽法:類似概念也可應用在特徵圖上,例如 DropOut、DropConnect 與 DropBlock 等方法,以增強模型對中間表徵的容錯與穩定性。
- 混合多張影像:MixUp 與 CutMix 等策略,將兩張影像進行融合或拼接,並對標籤進行加權調整或面積比例分配,進一步提升模型對複雜場景的理解能力。
- 風格轉換:Style Transfer GAN 也被用來產生不同風格的影像版本,以降低 CNN 對特定材質與紋理的過度依賴。
標籤平滑與知識蒸餾
除了輸入影像的處理,對標籤的操作也是免費優化的一環。
在分類任務中,標籤通常以 one-hot 的方式呈現,這種「硬標籤」雖然清晰,但缺乏語意層級的模糊彈性。為此,Label Smoothing 被提出來將原始標籤轉為「軟標籤」,讓模型不會過度自信於某一類別,提高其在未知資料上的穩定性。
進一步的作法是引入知識蒸餾,由一個性能較高的 Teacher 模型提供更細緻的輸出分布,透過 Label Refinement Network 引導學生模型學習類別之間的相對關係。
損失函數的優化
最後,針對物件偵測任務中極為關鍵的邊界框回歸問題,傳統做法是使用 MSE 或 L1/L2 Loss 直接對座標值(如中心點或對角線)進行回歸。然而這類做法會忽略整體框的幾何結構,也容易受物件尺度變化所影響。
因此,IoU Loss 成為近年主流選擇,將預測框與真實框的重疊區域作為損失函數的核心,具備尺度不變性與語意一致性的優勢。
其後又出現多種改進版本:
- GIoU (Generalized IoU):納入最小包圍框,解決 IoU 在完全不重疊時無梯度的問題。
- DIoU (Distance IoU):加入中心點距離,強化定位精度。
- CIoU (Complete IoU):同時考慮重疊率、中心距離與長寬比,綜合性最佳,也具有更快的收斂速度。
這些回歸損失的改良,不僅提升了收斂穩定性,也讓模型在定位精度上邁向更高水準,成為高性能偵測器不可或缺的一環。
精巧模組設計
與 Bag of Freebies 相對,另一類提升準確率的策略被稱為 Bag of Specials。
這類方法通常會略微增加推論成本,但所帶來的準確率提升遠大於其額外計算開銷,是物件偵測中極具 CP 值的技巧。
這些技巧可以分為四個面向:感受野擴張、注意力機制、特徵整合模組、非極大值抑制(NMS)後處理,再加上一個常被忽略但極具影響力的面向:激活函數設計。
擴張感受野
為了讓模型更早感知上下文訊息並提升空間理解力,許多模組被設計來擴張感受野:
- SPP(Spatial Pyramid Pooling) 模組源自傳統的 SPM 概念,原先在圖像分類中用來建立不同尺度的區塊表示。YOLOv3 將其整合至卷積網路中,改為多尺度的 MaxPooling 後串接(例如 k = 1, 5, 9, 13),不改變空間維度卻能大幅擴張感受野。在 YOLOv3-608 上僅增加 0.5% 計算量,卻能提升 AP50 2.7%。
- ASPP(Atrous Spatial Pyramid Pooling) 使用多個不同膨脹率的 3×3 膨脹卷積,以等價於多尺度感受野的方式進行空間感知。
- RFB(Receptive Field Block) 更進一步使用多組不同膨脹率的卷積並行計算,獲得更綿密且廣域的空間覆蓋效果。在 SSD 架構上只增加 7% 推論時間,卻帶來 5.7% 的 AP50 提升。
注意力機制
注意力模組能幫助模型動態調整重要訊號的強度,是近年廣泛應用於各項視覺任務的核心技術:
- SE(Squeeze-and-Excitation) 模組專注於通道層級的重新加權,能夠幫助模型更集中在有判別性的特徵維度上,但在 GPU 上的推論開銷相對較高。
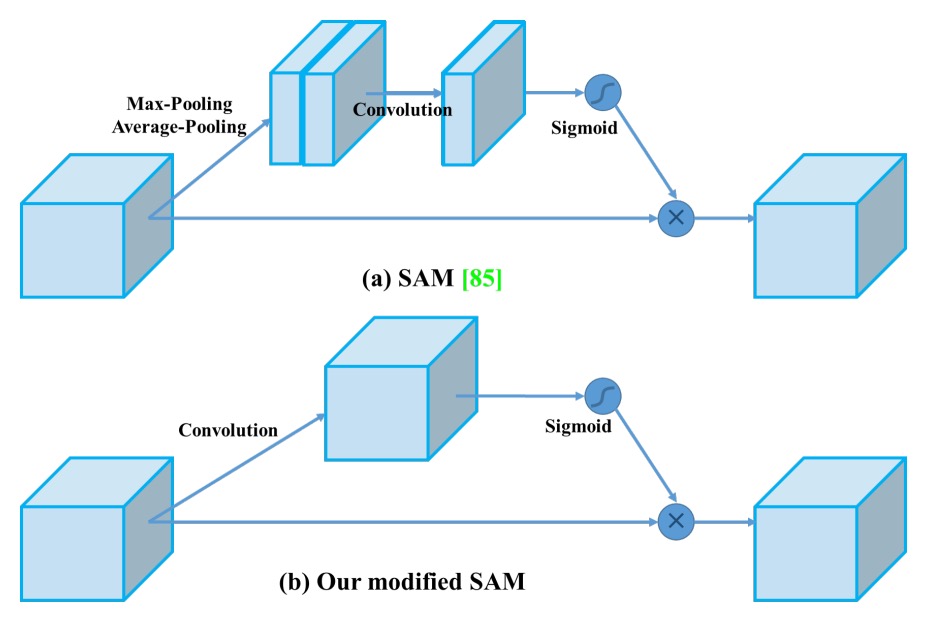
- SAM(Spatial Attention Module) 則是在空間層級引入注意力,針對輸入特徵圖進行空間加權,成本極低且幾乎不影響 GPU 上的推論速度。
跨尺度整合
傳統使用 skip connection 或 hypercolumn 將淺層與深層特徵拼接。隨著 FPN 為代表的多尺度融合架構興起,更多高效的融合模組被提出:
- SFAM:基於 SE 模組進行通道注意力強化。
- ASFF(Adaptive Spatial Feature Fusion):透過 point-wise softmax 決定不同尺度的特徵融合權重。
- BiFPN:提出 multi-input weighted residual connection,實現尺度層級的學習式融合,在準確度與效率間取得良好平衡。
激活函數的演進
一個好的啟用函數能讓梯度更穩定傳遞,又不造成額外負擔:
- ReLU 解決了早期 sigmoid/tanh 的梯度消失問題。
- LReLU / PReLU 解決了負區間無梯度的問題。
- ReLU6 / hard-Swish 則是為量化網路量身打造。
- SELU 支援自我正規化(self-normalization)。
- Swish / Mish 為平滑且可導的函數,能提升深層網路的收斂性與精度。
這些啟用函數雖屬微觀設計,但往往能在大型網路中累積顯著的效能優勢。
NMS 後處理
非極大值抑制(NMS)用來篩除重複預測框,是物件偵測的最後一道程序:
- 傳統 NMS 依據 IoU 和置信度排序保留最佳框,但無法處理遮擋物件時的信心退化問題。
- Soft-NMS 嘗試以懲罰分數的方式減少「過於強硬」的篩除。
- DIoU-NMS 則引入中心距離資訊,使篩選更具幾何直覺。
然而,隨著 anchor-free 架構的興起,有些架構(如 FCOS)已將 NMS 移除,直接藉由設計 loss 或後處理條件約束來完成預測選擇。
解決問題
我們終於可以來看 YOLOv4 本人了。
有了上面各種方法的介紹,可以知道作者就是想找出一個又快又好的架構。
架構選擇
在設計 Backbone 時,作者從「分類模型 ≠ 偵測模型」的核心觀念出發,重新評估各種架構在不同任務下的效能表現。
他們發現儘管 CSPResNeXt50 在 ImageNet 上表現優異,但在 MS COCO 偵測任務中,CSPDarknet53 的表現更勝一籌。這是因為偵測任務相較分類任務,需求更加嚴苛:
- 更高輸入解析度:為了可以辨識小型目標。
- 更深的層數與更大的感受野:可以涵蓋更廣泛的上下文關係。
- 更多參數容量:可以同時應對多目標、多尺度的場景需求。
以感受野為例,CSPResNeXt50 僅有 16 層 3×3 卷積,感受野為 425×425;CSPDarknet53 則有 29 層,感受野達 725×725,搭配較大的參數量(27.6M),更能應對複雜的偵測場景。

因此,YOLOv4 選擇以 CSPDarknet53 作為骨幹,並在其上加入 SPP 模組 增強感受野,再透過 PANet 進行多層特徵聚合,最終連接至 YOLOv3 Head 完成預測。
這個架構的核心配置為:
- Backbone:CSPDarknet53
- Neck:SPP + PANet
- Head:YOLOv3(anchor-based)
訓練策略選擇
YOLOv4 的訓練策略建構在兩個經典概念之上:
- Bag of Freebies (BoF):只增加訓練成本,不增加推論負擔
- Bag of Specials (BoS):略增推論成本,顯著提升準確率
在訓練架構上,YOLOv4 拋棄了不易收斂的 activation(如 PReLU, SELU)與針對量化設計的 ReLU6,改用效果平衡的 Mish activation;正規化方面則放棄需多卡訓練的 SyncBN,轉而設計更適合單卡訓練的 Cross mini-Batch Normalization (CmBN)。
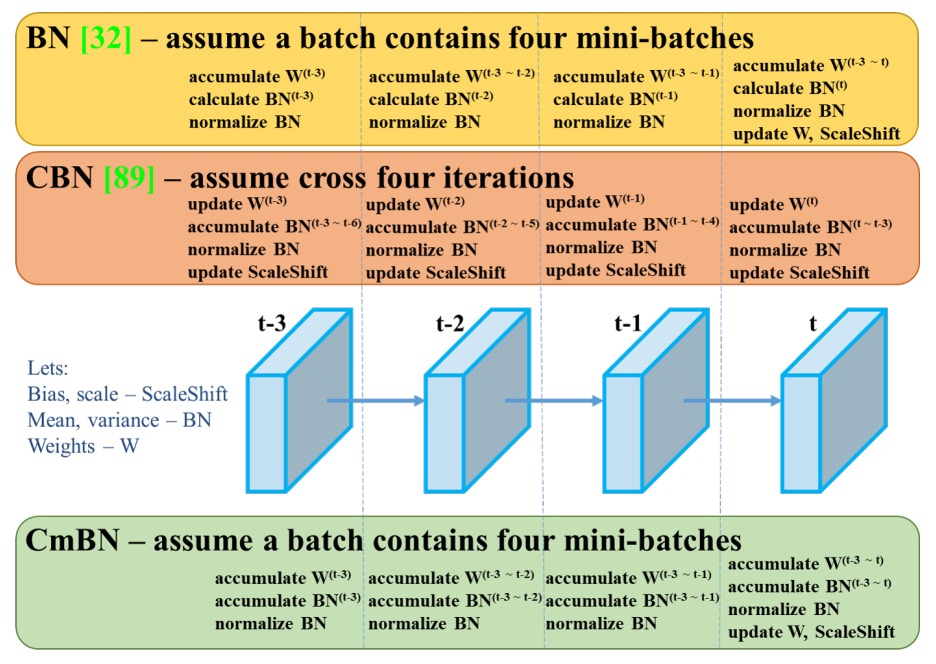
在深度學習中,Batch Normalization(BN)是極為關鍵的穩定訓練手段。
但這個技巧有一個隱性假設:每個 mini-batch 都足夠大,才能取得代表性的均值與變異數統計量。然而,當模型規模增大、顯存受限或僅能使用單張 GPU 時,mini-batch size 常常偏小,導致 BN 的效果急劇下降,甚至產生不穩定收斂問題。
過往為了解決這個問題,有人提出 SyncBN(Cross-GPU BN),讓多張 GPU 之間共享統計資訊,提升統計穩定性。但這需要多卡硬體資源,不適合單卡訓練場景。
CmBN 則引入「跨 mini-batch」統計聚合機制:
假設我們訓練時設計了某種資料增強方式,如 Mosaic,一次性將 4 張圖組成一張訓練影像。CmBN 會將這組由不同來源圖像構成的 batch,看成一個「擴展樣本集合」。並在 BN 計算時針對這些子樣本分開統計,再進行合併平均。
也就是說,一個 batch 中包含多個 mini-batch 的統計線索,讓 BN 不再受限於單一子樣本的資料偏態。這種策略類似於對小 batch size 作資料層面的「聚合修正」,在不需要同步多卡的前提下,改善 BN 的泛化穩定性
此外,DropBlock 被選為主要的正則化方法,搭配 CutMix、MixUp、Label Smoothing 等增強策略,構成訓練中最具代表性的免費提升工具包。
額外增強設計
YOLOv4 對於訓練過程還進行了三項關鍵優化:
-
Mosaic 資料增強:
將四張影像混合為一,擴增場景多樣性,並讓 BatchNorm 同步處理更多圖像資訊,提升小 Batch 下的穩定性。

-
SAT(Self-Adversarial Training):
訓練初期模型對自身圖像進行對抗性修改,再學習辨識這些偽裝後的圖像,增強對遮蔽與偽裝攻擊的穩健性。
-
模組改良:
-
SAM 改為 point-wise 注意力,提升對細節資訊的關注力。
-
PANet 的 shortcut 改為 concat,強化特徵融合完整性。
-
這些設計,從增強資料表現力、擴展模型辨識邊界,到重塑訓練穩定性,構成一整套適應單卡訓練與推論環境的完整優化策略。
組件總覽與技術選型
整合上述設計,YOLOv4 最終的模組選擇如下:
架構組成:
- Backbone:CSPDarknet53
- Neck:SPP、PAN
- Head:YOLOv3 Head
訓練技巧(BoF for Backbone & Detector):
- CutMix / Mosaic 資料增強
- DropBlock 正則化
- Label smoothing
- CIoU Loss
- CmBN
- SAT
- Grid sensitivity 消除策略
- 多 Anchor 對應單一 ground truth
- Cosine annealing scheduler
- 隨機訓練解析度
- 最佳化參數組合(使用基因演算法)
推論技巧(BoS for Backbone & Detector):
- Mish activation
- CSP 模組
- Multi-input weighted residual connections
- SPP 模組
- 改良版 SAM
- PAN path aggregation
- DIoU-NMS 後處理策略
實驗配置
為了驗證各種訓練策略對模型性能的實際影響,作者在兩個標準資料集上進行了大規模實驗,分別針對分類與偵測任務進行訓練與評估。
在 ImageNet(ILSVRC 2012 val) 影像分類實驗中,採用以下預設訓練設定:
- 訓練步數:8,000,000 steps
- Batch size / mini-batch size:128 / 32
- 學習率排程策略:Polynomial decay,初始學習率為 0.1
- warm-up 步數:1,000
- Momentum / Weight decay:0.9 / 0.005
對於 Bag of Freebies (BoF) 的設定中,作者驗證了以下策略:
- MixUp
- CutMix
- Mosaic
- 模糊處理(Blurring)
- 標籤平滑正則化(Label Smoothing)
在 MS COCO(test-dev 2017) 物件偵測實驗中,作者採用以下預設訓練設定:
-
訓練步數:500,500 steps
-
學習率排程策略:Step decay
- 初始學習率:0.01
- 於第 400,000 與 450,000 步時,各乘上 0.1
-
Momentum / Weight decay:0.9 / 0.0005
-
Batch size / mini-batch size:64 / 8 或 4(依模型與記憶體容量調整)
除部分使用基因演算法搜尋最佳超參數的實驗外,其他所有實驗均使用相同預設設定。
在超參數搜尋實驗中,作者使用 YOLOv3-SPP 架構與 GIoU loss,在 min-val 5k 子集上進行 300 個 epoch 的搜尋。最終採用的最佳組合如下:
- 學習率:0.00261
- Momentum:0.949
- IoU 分配門檻:0.213
- 損失正規化係數:0.07
所有實驗均在 單張 GPU 上進行,並未使用如 syncBN 等多卡優化技術。
討論
分類器訓練中不同特徵的影響
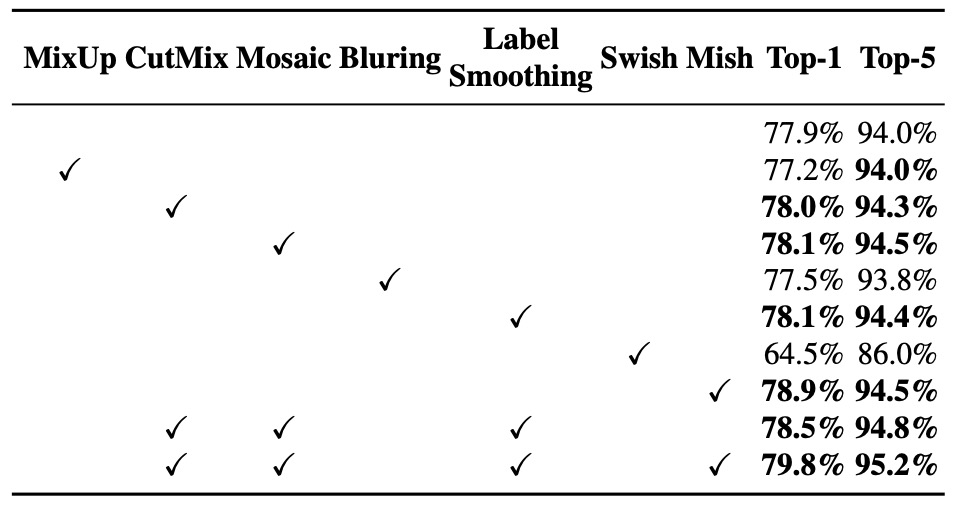
作者首先探討在分類器訓練過程中,不同訓練策略對最終準確率的影響,特別聚焦於幾個常見的訓練強化技巧:標籤平滑(Class label smoothing)、各類資料增強方法(如 模糊處理、MixUp、CutMix、Mosaic),以及不同類型的激活函數(Leaky ReLU、Swish、Mish)對模型學習的實質影響。
實驗結果如上表,在分類器訓練過程中,以下特徵明顯提升了模型準確率:
- CutMix 資料增強
- Mosaic 資料增強
- Class label smoothing 標籤平滑正則化
- Mish 激活函數
因此,在 YOLOv4 的分類器訓練策略中,作者最終選擇的 BoF-backbone(Bag of Freebies for classifier) 包含以下項目:
- CutMix
- Mosaic
- Class label smoothing
同時,根據實驗結果,Mish activation 被納入作為補充性的激活函數選項,與上述策略協同使用,進一步提升分類準確率表現。
偵測器訓練中不同特徵的影響
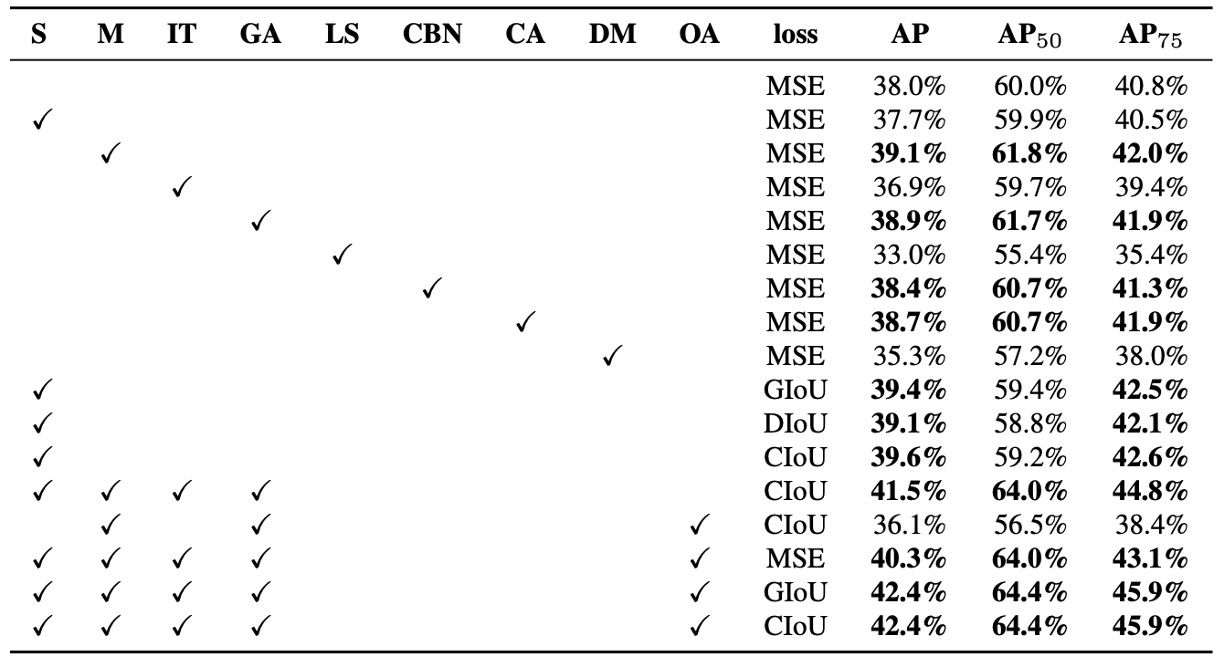
作者進一步評估不同訓練策略對偵測器準確率的影響,特別是針對 Bag of Freebies for detector(BoF-detector) 所進行的系統性實驗,如上表所示。
YOLOv4 大幅擴充了 BoF 的選項清單,專注於那些能在不犧牲推論速度(FPS)的前提下提升準確率的訓練技術。
以下經過驗證的 BoF-detector 項目:
-
S: Grid Sensitivity Elimination
在 YOLOv3 中,目標座標由 所定義,其中 為整數。當 值極大或極小時,才能使 接近格點邊緣( 或 ),這造成某些邊緣目標難以被檢出。
為此,作者將 sigmoid 結果乘上一個大於 1 的因子,有效解除格點對偵測可行性的限制。
-
M: Mosaic 資料增強 將四張影像拼接為訓練輸入,使模型同時學習不同場景與比例下的目標,強化泛化能力。
-
IT: IoU Threshold 為每個 ground truth 配對多個 anchor,條件為 IoU(anchor, truth) > threshold,以增加樣本使用率。
-
GA: Genetic Algorithms 於訓練初期(前 10% 時間)使用基因演算法搜尋最適超參數,提升收斂穩定度與模型表現。
-
LS: Class Label Smoothing 對分類任務套用 label smoothing,降低模型過度自信,提升對類別間模糊界線的辨識力。
-
CBN: Cross mini-Batch Normalization (CmBN) 在整個 batch 間彙總統計值,而非僅限於單一 mini-batch,提升小 batch 訓練的穩定性。
-
CA: Cosine Annealing Scheduler 採用餘弦函數動態調整學習率,達到更平滑的學習曲線與收斂效果。
-
DM: Dynamic mini-batch Size 在小解析度訓練階段,動態增加 mini-batch size,配合隨機輸入尺寸的訓練設計。
-
OA: Optimized Anchors 根據輸入解析度(如 512×512)最佳化 anchor 位置與尺寸,提高 anchor 分配效率。
-
BBox Regression Loss 比較多種邊界框損失函數,包括 GIoU、CIoU、DIoU 與傳統 MSE,驗證其在不同場景下的回歸品質。
此外,作者也針對 Bag of Specials for detector 的設計進行驗證,如下表所示:
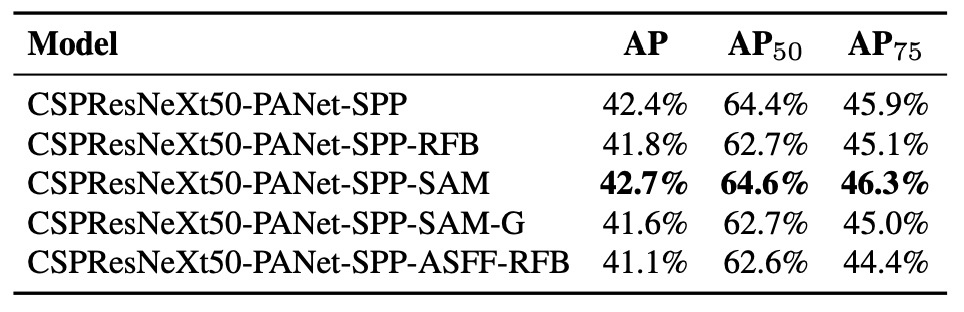
實驗項目包含:
- PAN:參數聚合與特徵流通性提升
- RFB:多尺度膨脹卷積以擴展感受野
- SAM:空間注意力機制
- Gaussian YOLO (G):預測框不再為單點估計,而是高斯分布
- ASFF:跨尺度注意力式融合策略
根據實驗結果,當模型同時採用 SPP、PAN、SAM 時,能取得最佳整體性能表現。
不同 Backbone 的影響
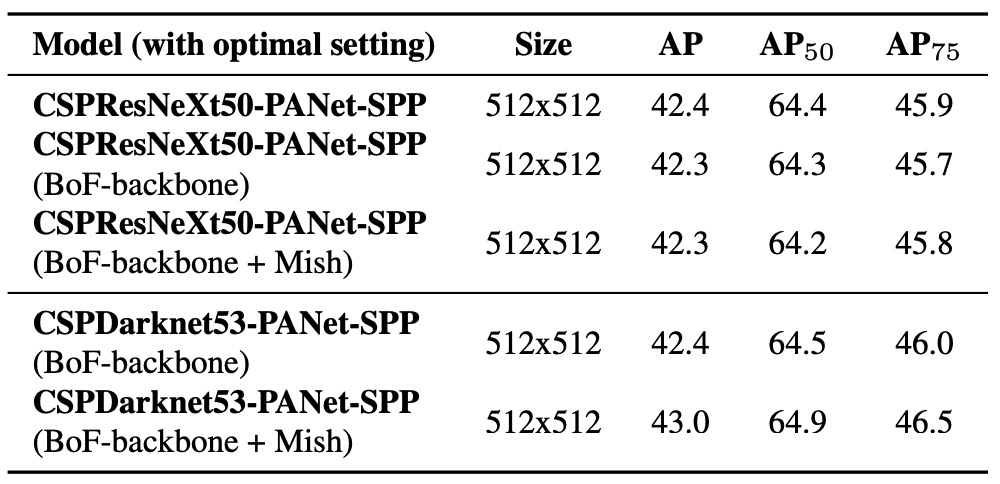
作者探討不同 Backbone 對偵測器準確率的影響,如上表所示。
實驗結果顯示:分類器表現最好的模型,並不代表在物件偵測任務中同樣優秀。
首先,即使在分類任務中,採用各種訓練技巧後的 CSPResNeXt50 模型其準確率普遍高於 CSPDarknet53,但一旦將這些模型用作偵測器的骨幹,整體偵測表現卻反而以 CSPDarknet53 為優。
具體來說,CSPResNeXt50 搭配 BoF 與 Mish activation 可進一步提升分類準確率,但當使用這組預訓練權重初始化偵測器後,偵測精度反而下降。相對地,CSPDarknet53 同樣搭配 BoF 與 Mish 進行分類訓練,不僅提升了分類器本身的準確率,後續作為偵測器骨幹使用時,偵測表現也隨之提升。
這項發現說明了分類任務與偵測任務在特徵學習需求上具有本質差異。
CSPDarknet53 所具備的結構特性與感受野設計,更適合作為物件偵測任務的特徵提取器。
不同 mini-batch size 的影響
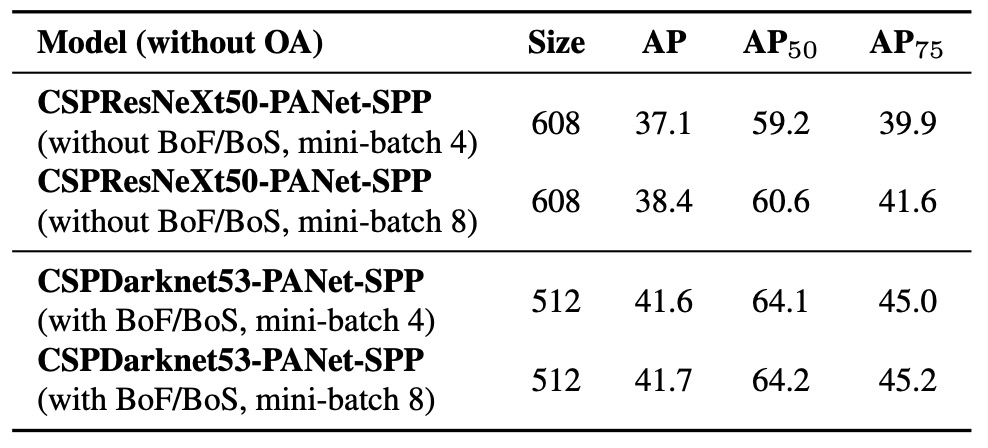
最後,作者分析在不同 mini-batch size 設定下訓練所產生的影響,對應結果如上表所示。
從結果中可以明確觀察到:在導入 BoF 與 BoS 訓練策略之後,mini-batch size 幾乎不再影響偵測器的最終性能表現。
這項發現具有重要實務意義。
過去為了提升訓練穩定性與模型效能,往往需依賴大量 GPU 記憶體來支援較大的 batch size。但本研究顯示,在 YOLOv4 中結合了如 Mosaic、CmBN、DropBlock、Label smoothing、SPP、PAN 等訓練與架構優化策略後,即便在小型 mini-batch 下仍能維持穩定且優異的學習效果。
Benchmark
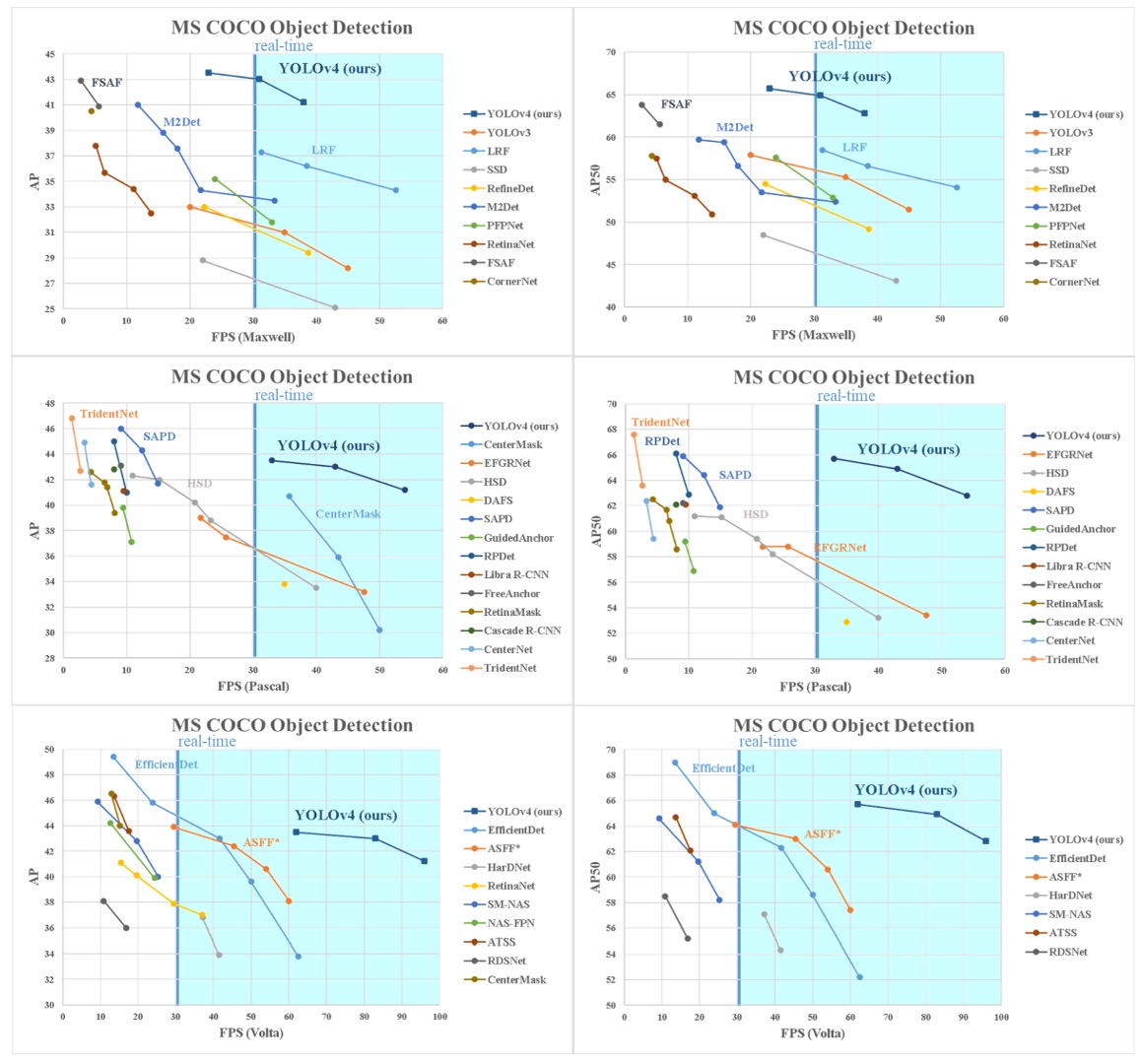
YOLOv4 的最終成果與其他最先進的物件偵測器相比,如上圖所示,位於速度與準確率之間的 Pareto 最佳曲線上,展現出在效率與精度之間取得最優平衡點的能力。
相較於目前主流的快速模型與高精度模型,YOLOv4 同時優於兩者,在保持高推論速度的同時,也達成了媲美甚至超越先前高準確率模型的性能指標。
考慮到不同研究方法在推論時間測試上使用的 GPU 架構可能有所不同,作者分別在常見的三大 GPU 架構上測試 YOLOv4 的效能,包括:
- Maxwell 架構:GTX Titan X(Maxwell)、Tesla M40
- Pascal 架構:Titan X(Pascal)、Titan Xp、GTX 1080 Ti、Tesla P100
- Volta 架構:Titan Volta、Tesla V100
這些實驗結果進一步驗證了 YOLOv4 的可擴展性與普遍適用性。
無論在老舊架構還是最新硬體上,YOLOv4 都能保持良好的運算效率與穩定表現,充分體現其設計中對硬體親和力的重視。
結論
YOLOv4 在 MS COCO 的 AP50 評估指標上超越了所有現有主流模型,並在推論速度(FPS)上保持領先。更重要的是,YOLOv4 可以在僅具備 8~16GB VRAM 的一般消費級 GPU 上完成訓練與部署,大幅降低技術門檻,具備廣泛應用的可行性。
每個想做物件偵測的開發者,都可以來翻一翻這篇論文,絕對值回票價。