[24.10] YOLOv11

工程優化版
YOLOv11: An Overview of the Key Architectural Enhancements
難得 Ultralytics 發布新架構的時候會有論文。
不論如何,都應該鼓勵一下。
定義問題
物件偵測的舞台上,YOLO 這個名字已經喊了十年。
2015 年,Redmon 拿出一句口號:「You Only Look Once」。然後直接屏棄二階段的主流偵測架構,大刀闊斧地把偵測當成 回歸問題,一次性完成分類與定位。
自此之後,每一代 YOLO 都扮演著「即時偵測」的代名詞。
但是,隨著 YOLO 家族的演進,有兩個核心問題早已浮上檯面:
- 效能與速度的兩難: 小模型跑得快,但不準;大模型準,但跑不快。
- 多任務的整合:偵測、分割、姿態、旋轉框,這些需求在實務應用中同時存在,但過去的版本總是沒有辦法一起整合。
於是 Ultralytics 團隊試著把 YOLO 推進到一個 全能型視覺系統。
哦?有這種好事?我們一起來看看。
解決問題
YOLOv11 延續了 YOLOv9 與 YOLOv10 的設計基礎,整體架構仍然維持典型的三段式:
- Backbone → Neck → Head
其中,沒有徹底翻新的地方,但透過幾個局部改動,試圖在效能與效率上取得更穩定的表現。
Backbone:小幅度的替換
-
C2f → C3k2
舊版常用的 C2f block 被新的 C3k2 block 取代。
這個改動的目的是單純追求「更快、更省」:把大卷積拆成小卷積,用較小的 kernel 做運算,以減少計算量與參數量。效果上,C3k2 在不犧牲太多準確度的情況下,帶來了更好的延遲-精度比。
提示我們把架構畫出來看看,大致上是一樣的。
就是把堆疊的部分從原本的 Bottleneck 抽換成 C3k 模組。
C2f
C3k2
-
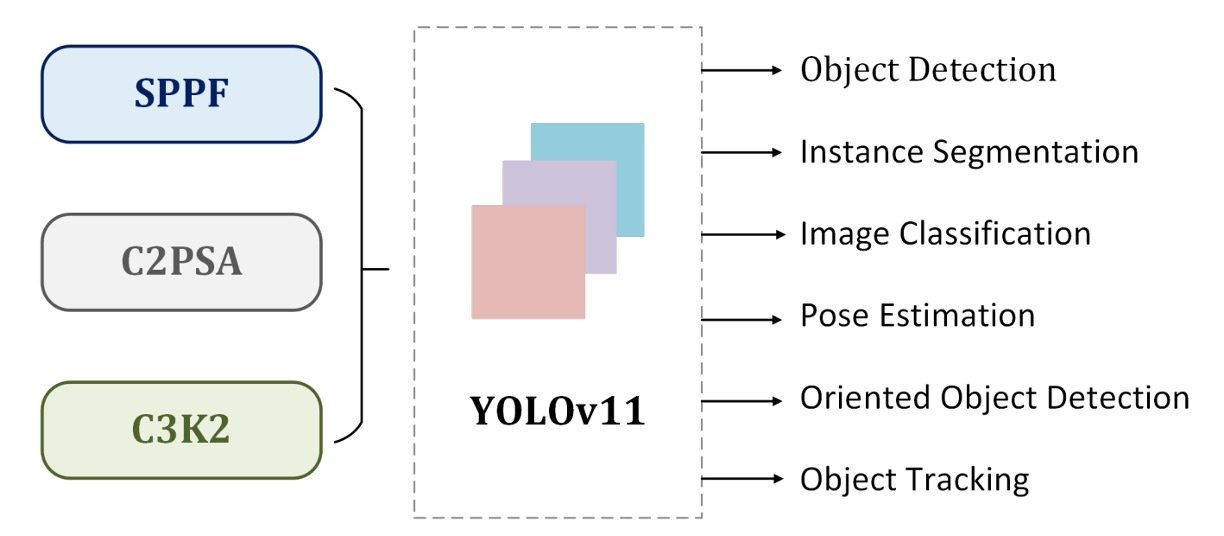
SPPF + C2PSA
在 SPPF 模組之後,多了一個 C2PSA(Cross Stage Partial with Spatial Attention)。
它讓模型能稍微更關注影像的關鍵區域,對於小物件或被遮擋的物體有幫助。
不過,這樣的注意力設計並不算新穎,更多是一種「跟進潮流」的選擇。
提示照例,這個新的 C2PSA 模組,我們也畫個圖來看一下。
C2‑PSA
PSA(Position‑Sensitive Attention)
ConvAttention(PSA 內部 MHSA 細節)
Neck:特徵融合的小修正
Neck 的任務仍然是把不同解析度的特徵拉到一起。
這裡 YOLOv11 同樣換上 C3k2 block,同時搭配 C2PSA,讓融合過程在效率上稍微優化。
整體來說,這部分的改動讓 YOLOv11 在 速度-準確度曲線 上比 v8、v9 更好看一些。
Head:輸出層的延伸
在 Head 部分,YOLOv11 沒有大改結構,只是持續套用 C3k2 block 與 CBS(Conv-BN-SiLU),最後輸出邊界框、物件性分數與分類結果。
多任務的整合
YOLOv11 相較於過去版本,最明顯的改變並不是在偵測架構本身,而是它被正式定位為一個「多任務框架」。
如下表所示:
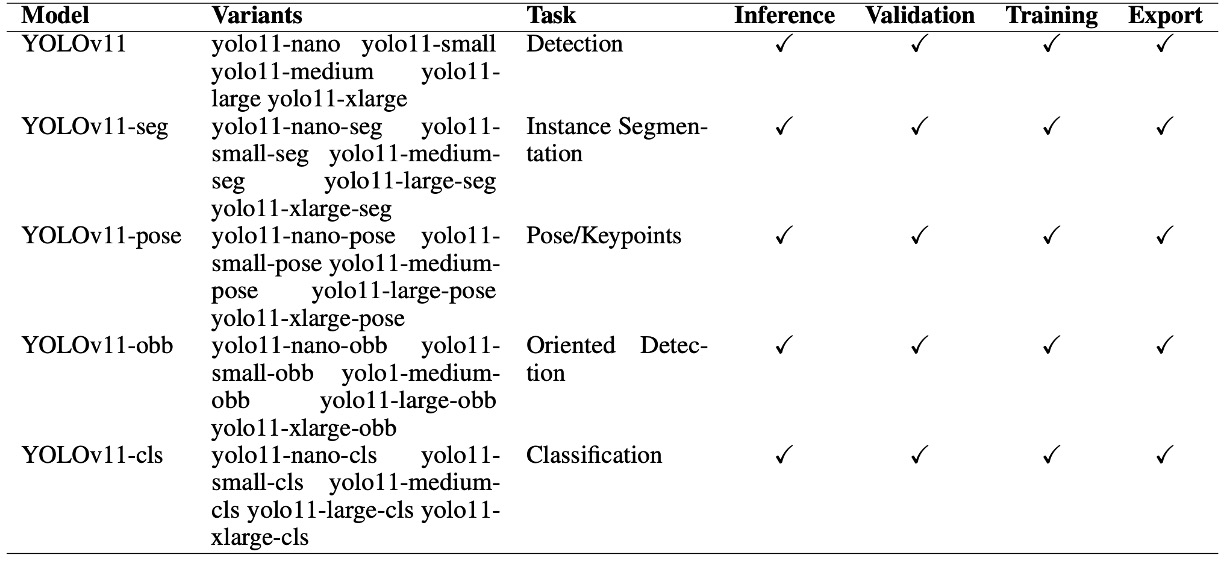
除了標準的物件偵測之外,Ultralytics 將 分割(segmentation)、姿態估計(pose)、旋轉框(OBB)、分類(classification) 都納入同一套系統,並提供相同的推論、驗證、訓練與匯出介面。
在實際應用上,這樣的整合具有一定意義。對於研究人員或產業開發者而言,過去往往需要依賴不同的工具鏈或分散的實作來處理偵測、分割、姿態等任務,如今可以透過 YOLOv11 的統一版本完成。
不過要注意的地方是 YOLOv11 並非在每個任務上都有領先的精度,更多時候是維持「可用且一致」的水準。
換句話說,它的優勢並不是單一任務的尖端性能,而是把多種電腦視覺需求收斂到同一個入口,形成一個相對穩定的多任務生態。這樣的定位也符合 Ultralytics 的產品策略,也讓 YOLO 系列在實務端可以覆蓋到更廣的應用場景。
討論
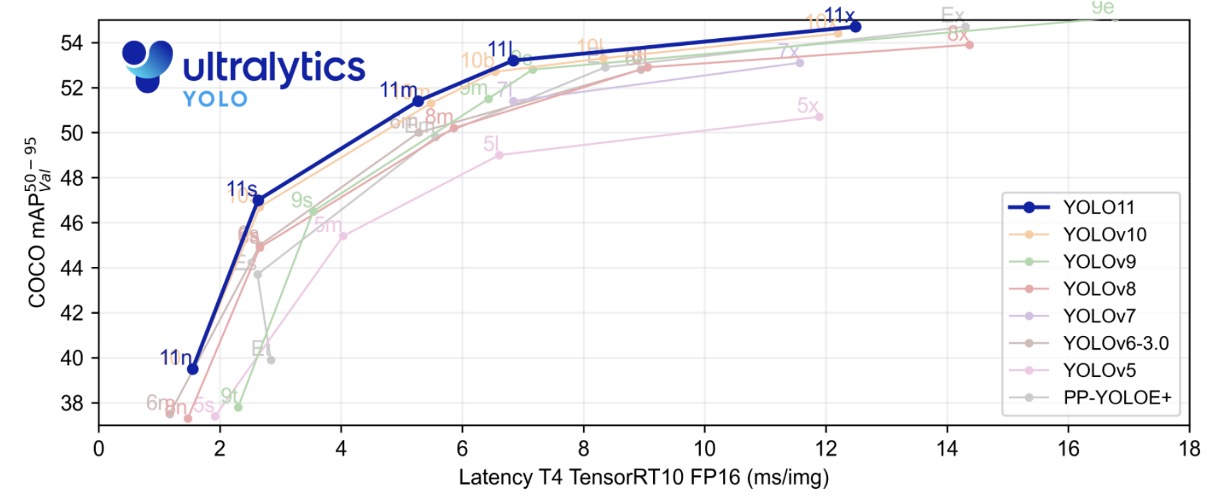
從官方的 benchmark 來看,YOLOv11 在速度與精度曲線上確實比前幾代更整齊一些。
不同尺寸的模型(n、s、m、x)在 COCO 上都取得了比 YOLOv8、YOLOv9、YOLOv10 略高的 mAP,同時維持相對較低的延遲。尤其是 YOLOv11m,在精度接近 YOLOv8l 的情況下,參數量與運算量都更低,顯示出這一代在「效率優化」上確實下了一些功夫。
在高延遲區間,大模型如 YOLOv11x 可以達到約 54.5% mAP@50–95,推理時間維持在 13ms 左右;而在低延遲區間,小模型如 YOLOv11s 能在 2–6ms 的範圍內仍維持約 47% mAP。這種分布讓 YOLOv11 在即時應用的不同需求下,都能找到合適的規模版本,算是一種實用上的便利。
結論
看完這篇論文,我們認為 YOLOv11 的貢獻更多體現在工程層面的微調,而非方法論上的突破。
它在 backbone、neck 與 head 全面換上 C3k2 模組,確實帶來了更好的參數效率與推理速度,也在低延遲場景下取得了不錯的表現。但這樣的改動並沒有改變 YOLO 的基本範式,就只是對現有設計的優化。
照理講,這種提升的幅度並不足以支撐「下一代架構」的定位......
不過誰知道呢,反正它是發版了,我們就接受了吧。