[24.12] YOLO-Tiny

我是一隻小小鳥
YOLO-Tiny: A lightweight small object detection algorithm for UAV aerial imagery
無人機已悄然飛入我們生活的各個縫隙。
但對於物件偵測的演算法來說,這個機器帶來的問題真是煩死人了。
定義問題
無人機已經深入日常場景的每一個空隙,從空拍巡檢到災害偵測,它所帶來的大量影像也對物件偵測演算法提出了新的挑戰。
對模型而言,無人機所拍攝的「天空視角」充滿了不友善的條件:畫面中目標尺寸極小、比例不一,還常常被背景干擾或部分遮蔽,進一步壓縮了有效特徵的辨識空間。同時,部署場景通常伴隨極端的資源限制,讓高效能模型即使準確也難以實際運作。
當前主流的目標偵測方法雖然在性能上已趨成熟,尤其以 YOLO 系列為代表的單階段演算法,更因其速度優勢成為實時應用首選,但原始架構仍難以直接應對高空拍攝與小物體偵測的雙重需求。
在過去的改良中,有人試圖透過更換卷積模組、添加金字塔結構、引入注意力機制或進行跨層融合,來提升小物體辨識的效果;也有人將目光轉向資料增強、候選框預設與尺度調整等訓練環節。
但大多方法仍無法解決一個根本問題:要在小算力的終端設備上,做到即時、準確、穩定地辨識畫面中那一點點微小的可疑目標,並不只是「壓縮模型」這麼簡單。
這篇論文正是針對這個問題出發,以 YOLOv5s 為基礎,提出一套針對 UAV 空拍任務所設計的輕量化小物體偵測架構。
解決問題
回顧 YOLOv5
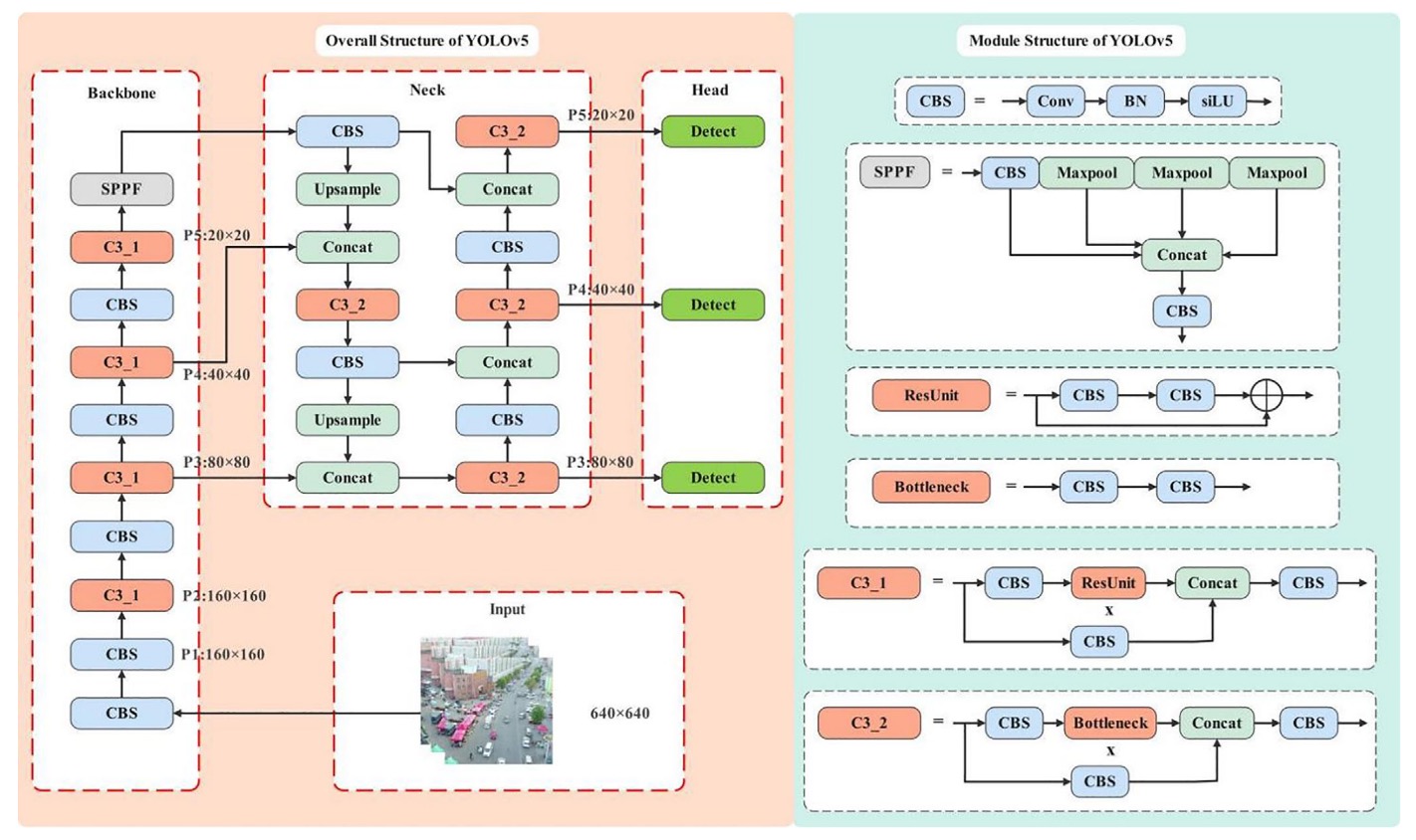
在 YOLOv5 的骨幹結構中,輸入影像經過五次下採樣後,會產生五組不同解析度的特徵圖(P1 至 P5),尺寸依序為 320、160、80、40、20。這種金字塔式的特徵圖設計,使得模型能夠針對不同大小的物體,對應到不同層級進行預測。
其中,YOLOv5 的標準偵測結構是從 P3(80×80)到 P5(20×20)進行多尺度融合,主要鎖定 8×8 像素以上的物體。
但對無人機來說,這個尺寸下的門檻顯然過高。
VisDrone2019 資料集的統計圖給出了關鍵觀察:
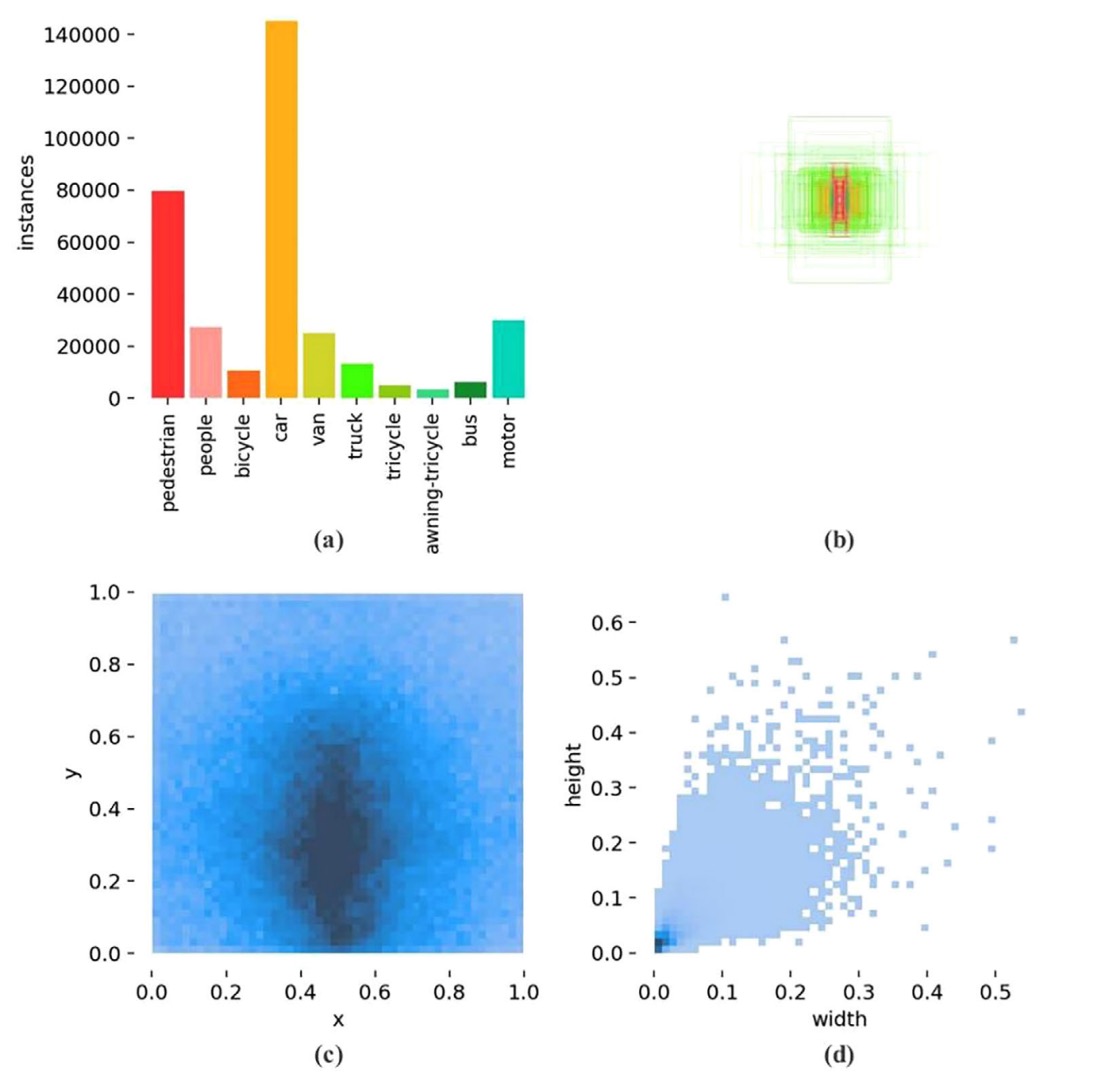
- 上圖 (a) 表示:目標數量嚴重失衡,
- 上圖 (b) 表示:多數目標落在極小尺寸範圍,
- 上圖 (c) 表示:邊框長寬比例高度集中,
- 上圖 (d) 表示:中下區域為標註密集熱區。
換句話說,這是一個「高度偏向小物體的空拍任務」,而 YOLOv5 現行設計在此條件下存在結構性偏差:預測層主要聚焦在 P3–P5,正是對極小目標最不友善的位置。
過去已有研究嘗試於 YOLOv5 增設 P2 偵測頭(即 160×160 特徵圖)以捕捉更細微的訊號,雖然偵測力有所提升,卻也讓參數量與運算量同步飆升,對於資源有限的終端裝置而言,代價太高。
有另外一部分研究者選擇另一條路:移除 P5 層,將關注焦點回收至中小型物體。但這樣的簡化策略,準確率改善有限,未能真正突破瓶頸。
在這篇論文中,作者延續這條結構調整線,進一步移除 P4 層,將原先的三重偵測結構,壓縮為 P2 與 P3 的雙層架構,集中火力於更早期、更高解析的特徵圖。
但這同時也帶來另一個風險:
P4 + P5 層加總佔了 YOLOv5s 模型總參數的 92.1%。
一旦這部分被移除,整體模型參數將近乎腰斬,偵測能力也會隨之下降。
為了避免這種「輕量化過頭」的問題,作者採用一種抵換策略:
- 在保留 P2 與 P3 的前提下,適度增加模型的深度與寬度
讓特徵抽取與融合能力維持在可接受水平。
在實際權衡後,作者選擇了 depth = 0.67, width = 0.75 的配置,作為兼顧參數量與運算成本的折衷解。這樣的選擇不僅讓模型保有足夠的表達能力,也將 GFLOPs 控制在資源限制內,為後續模組輕量化鋪下基礎。
模組輕量化
在模型設計中,參數數量、計算成本(GFLOPs)與表達能力三者之間存在明顯張力,這種張力尤其在無人機這類邊緣裝置中顯得劇烈,我們既又希望表達得夠強,又不能參數太多。
先前在結構調整中,作者透過刪減 P4 與 P5 偵測頭,使參數量下降了 82.05%,使模型的「表達空間」也隨之萎縮。
為了補回這段損失,作者適度增加了深度與寬度,使參數略微回升、表達力得以恢復,但也導致 GFLOPs 從 16.0 增長至 24.2,成長了 53.13%。如果再繼續擴增,計算成本將呈指數式上升,明顯不適用於資源受限的場域。
為了解決這個矛盾,作者引入一種高效率的架構單元:
- 動態卷積(Dynamic Convolution)。
YOLOv5 中最核心的特徵擷取模組之一,是 C3 結構,內含大量的殘差路徑與卷積堆疊。
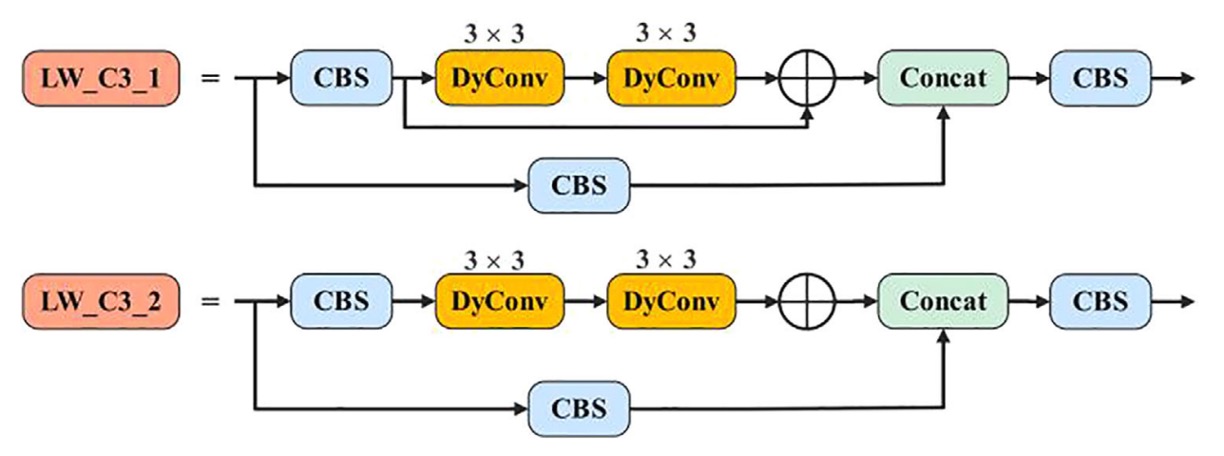
作者將其全面替換為新設計的 LW_C3,其關鍵變化如下:
-
LW_C3:將所有殘差支路中的 3×3 常規卷積替換為3×3 動態卷積,保留結構深度,同時降低靜態運算負擔。
-
LW_Downsample:針對原先採用 1×1 卷積進行通道壓縮與下採樣的模組,也全面改用 stride=2 的動態卷積,強化表達力與感受野控制。

動態卷積的核心精神,與動態感知機(Dynamic Perceptron)類似:
根據每個輸入 x,在一組基底函數中動態選擇最合適的權重組合。
如下示意圖:

數學上,它可以寫作:
其中
並滿足
這裡的 就是每個輸入對第 個卷積核的注意力權重。
本質上,我們不是學一組權重,而是學一個「選擇」的機制,讓模型根據輸入內容,自行決定該偏向哪一種特徵擷取策略。
為了實現這套選擇機制,作者採用常見的 SE 技術生成注意力權重,步驟如下:
- Global Average Pooling 壓縮空間資訊
- 經過全連接層 + Sigmoid,生成 k 維權重向量
- 權重套用在 k 組預定義的卷積核上,完成動態加權卷積
對於輸入通道 、輸出通道 、核大小 、kernel 數量 k,該模組的計算量為:
相較於標準卷積的
其運算量大幅下降,尤其當圖像解析度 H×W 較大時,差距更為明顯。
引入動態卷積後,模型得以在參數數量提升的同時,將 GFLOPs 成本控制在局部可接受範圍。
更重要的是,這種設計讓每個特徵點的感知方式不再統一,而是根據輸入語境作出微調,這也讓 YOLOv5 的特徵提取模組首次具備了語意適應性,這種微調的能力,在小物體偵測上更為關鍵。
多尺度自適應融合
在目標偵測中,多尺度特徵融合已是提升模型辨識力的基本操作,淺層網路擅長保留紋理與位置信息,深層網路則著重語意抽象與目標判斷。
理論上,將二者融合,應能兼顧「看清楚」與「看懂了」。但這種融合並不容易:尺度差異帶來語意斷層,簡單的拼接或加權,往往無法真正「整合」,只能「堆疊」。
為此,作者提出的 AMSFF(Adaptive Multi-Scale Spatial Feature Fusion)模組,即是為了解決這種融合失效問題所設計。
參考下圖架構:
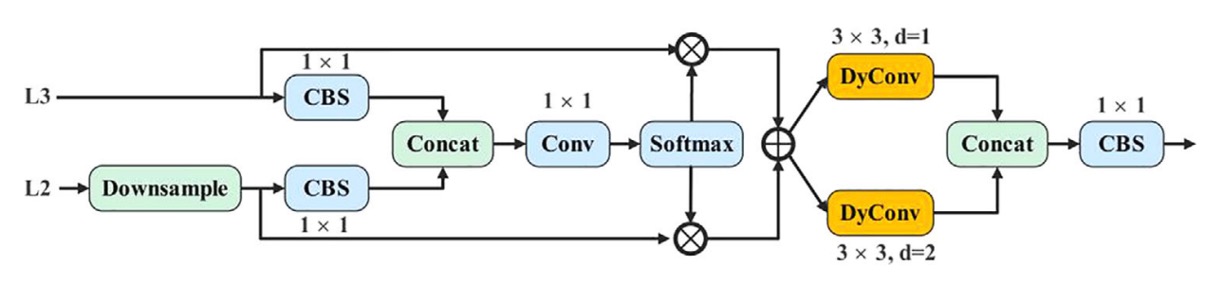
AMSFF 模組的運作邏輯如下,以 neck 部分的 L2(較淺層)與 L3(較深層)特徵為例:
-
對齊尺度:L2 特徵先經下採樣,使空間解析度與 L3 一致。
-
通道調整:接著透過 1×1 卷積,使 L2 的通道數與 L3 對齊,確保後續可進行逐元素操作。
-
初步融合:將調整過的 L2 與 L3 進行串接(concat),形成基礎融合張量。
-
權重學習:經 1×1 卷積,計算出兩組權重參數 與 ,作為兩層特徵的空間適應性權重,並通過 Softmax 保證其和為 1,且值落在 [0, 1] 之間。
-
加權融合:以這兩組空間對應權重進行加權求和,計算公式如下:
其中 表示第 n 層經過尺度對齊後對應到第 l 層位置 的特徵向量, 為融合後的新特徵圖。
-
語意擴展:為了擴展感受野,AMSFF 採用兩個 3×3 動態卷積,dilation rate 分別為 1 與 2,強化不同語境下的尺度適應能力。
-
整合輸出:最後透過一層 1×1 CBS 模組,完成融合結構的封裝與輸出,作為後續偵測頭的輸入。
與過去的融合方法(如 FPN、PAN、BiFPN)相比,AMSFF 的差異不只是加入了注意力機制,而是將融合本身視為一種「動態關係建構」。
實驗設計
本研究使用的實驗資料集為 VisDrone2019,由天津大學機器學習與資料挖掘實驗室釋出。
該資料集由無人機於各種天氣與光照條件下所拍攝,涵蓋城市、郊區、停車場與道路等多樣場景,特別適用於測試模型在小物體和複雜背景條件下的辨識能力。
VisDrone2019 共有十個目標類別,總計 10,209 張影像,其中:
- 訓練集:6,471 張
- 驗證集:548 張
- 測試集:3,190 張
資料分佈具有以下特徵:
- 場景多樣性高:從靜態擺拍到運動追蹤皆有涵蓋;
- 物體尺寸偏小:大多數標註框面積低於 32×32;
- 遮擋與光線變化明顯:對模型泛化能力構成挑戰。
下圖顯示了來自四種不同場景的樣本影像與標註框:

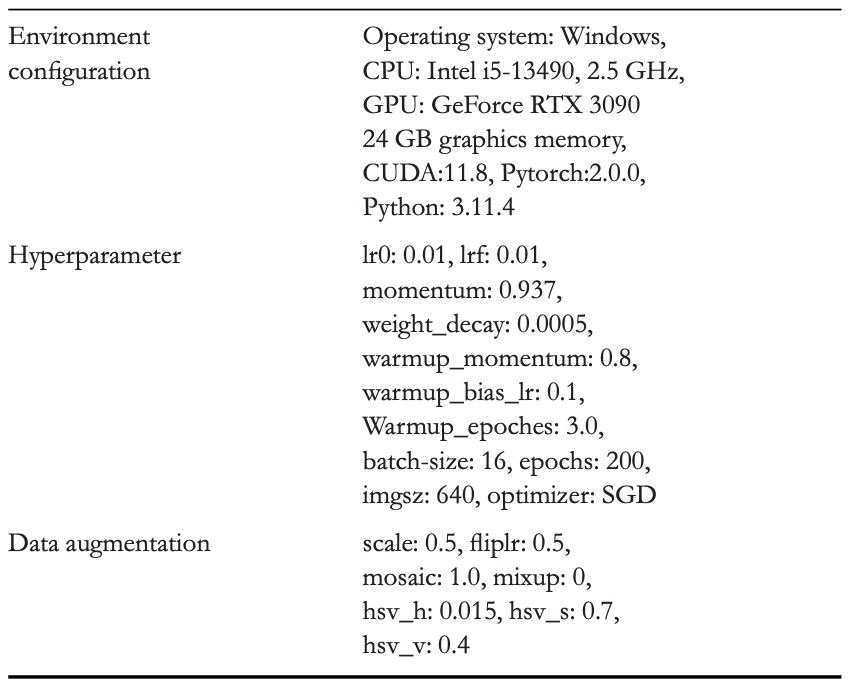
實驗採用標準 YOLO 訓練流程,環境設定與超參數配置如下表所列:
討論
網路架構調整對比實驗
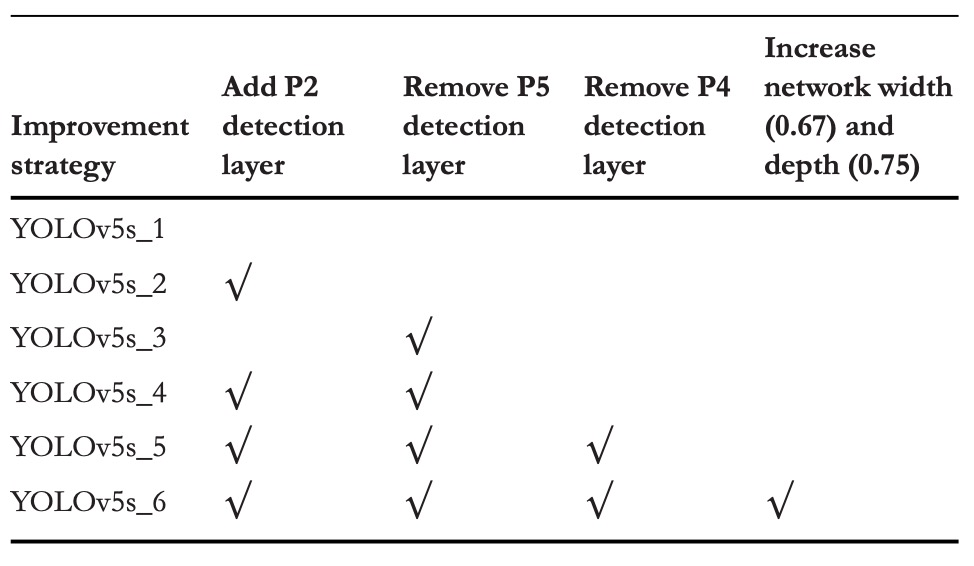
為評估各層偵測頭對小物體辨識的影響,本研究設計了 六組不同架構組合,並在相同訓練條件下進行對比實驗。具體結構變化如上表所示,對應的性能結果如下表:
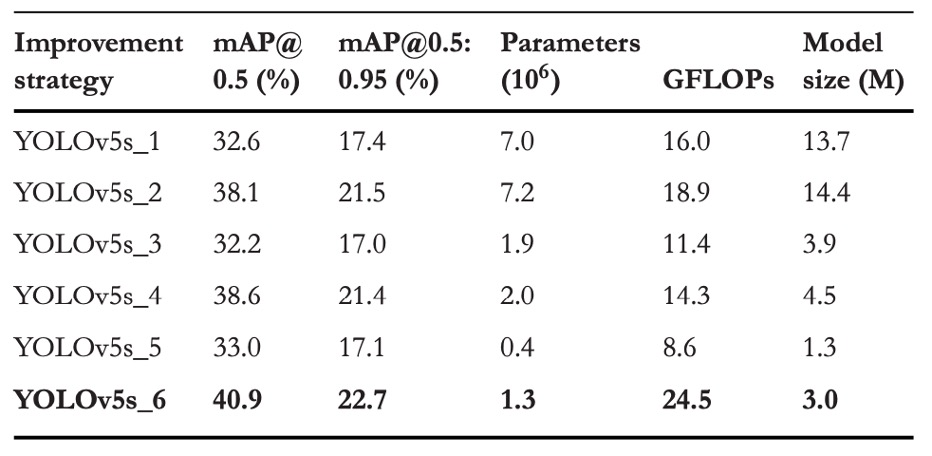
實驗結果可以看出幾個關鍵現象:
-
加入 P2 偵測頭
在原本的 YOLOv5s 架構上新增 P2 層(解析度為 160×160),模型在 VisDrone2019 資料集上的表現明顯提升:
- mAP@0.5 提升 +5.5%
- mAP@0.5:0.95 提升 +4.1%
這代表模型獲得了更高解析度的特徵對應能力,能夠更早期地注意到畫面中的微小目標。雖然參數量與 GFLOPs 略有增加,但整體成本仍可接受。
-
移除 P5 偵測頭
另一組實驗為移除 P5(20×20)層,目的是削減與大型物體相關的參數與運算,集中資源於中小尺度的辨識:
- mAP@0.5 微幅增加 +0.5%
- mAP@0.5:0.95 輕微下降 −0.1%
此舉雖大幅降低參數量,卻也顯示出「單純移除深層特徵,提升幅度有限」,甚至可能在泛化能力上略為受損。
-
同步移除 P4 + P5,並放大模型寬深度
最終版本則同時移除了 P5 與 P4,並將模型深度從 0.33 增至 0.67、寬度由 0.5 擴張至 0.75,以彌補過度裁剪所導致的表達能力削弱。
這一版本的結果最為顯著:
- mAP@0.5 總提升 +8.3%
- mAP@0.5:0.95 提升 +5.3%
這說明 P4 與 P5 雖為深層語意路徑,但對小物體偵測貢獻極少,反而因下採樣率過高(16×、32×)導致訊號嚴重流失。此外,適度增加網路容量(而非單純壓縮),可維持語意抽取的完整性,讓模型以更適合的「語境解析力」回應微小目標。
這組對比實驗說明,面對空拍小物體的辨識任務,關鍵不在於「更多的路徑」或「更深的特徵」,而是找出那些能真正看見小東西的節點,並給它足夠的容量去發揮作用。
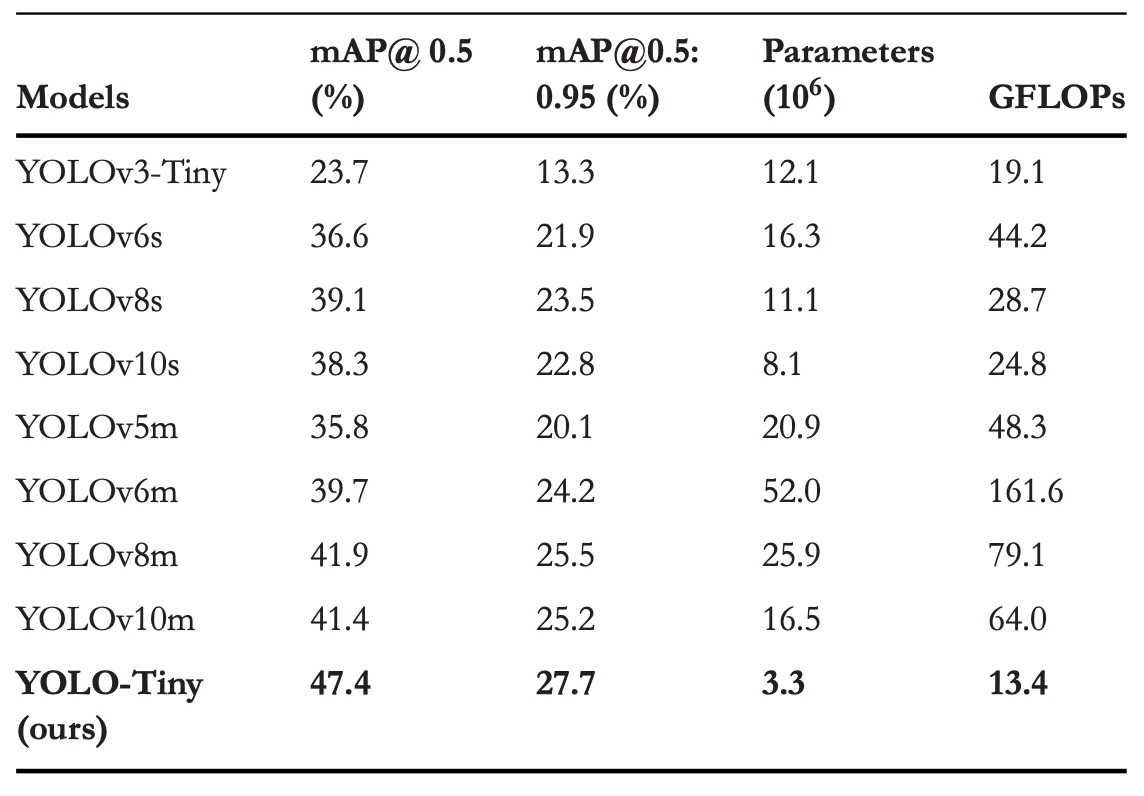
消融實驗
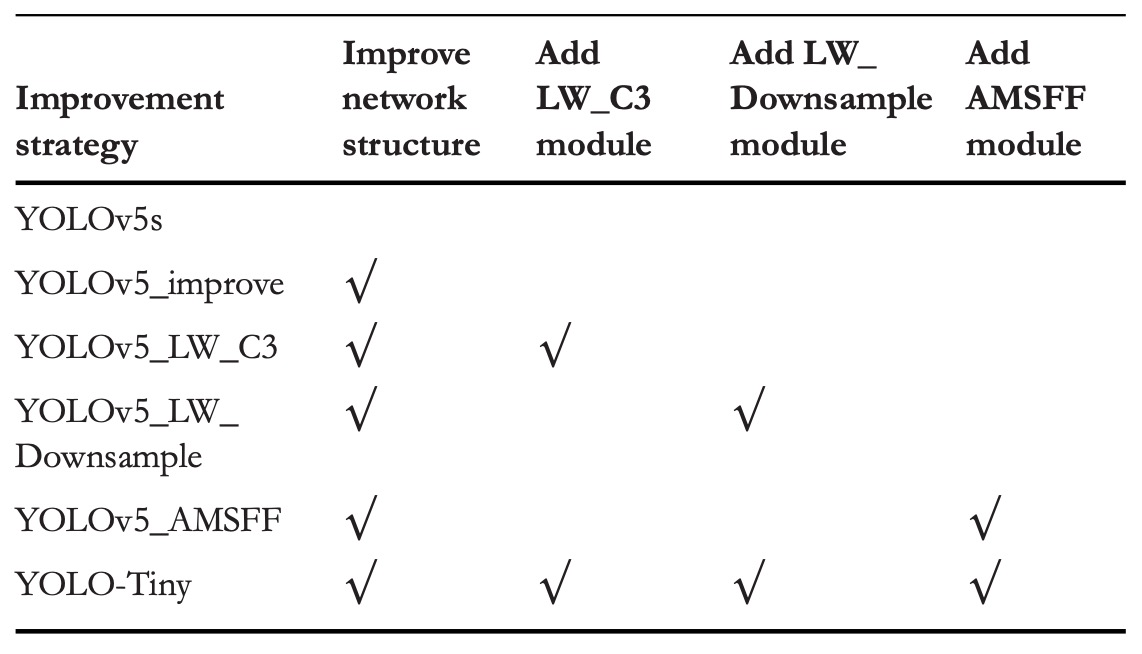
為驗證三項優化策略在不同組合下的獨立與整體貢獻,作者設計了一組消融實驗,於 VisDrone2019 上進行測試。
具體的優化組合如上表所示,性能結果彙整於下表:
這些結果可以看出每個模組的貢獻:
-
結構優化
- mAP@0.5 +8.3%
- mAP@0.5:0.95 +5.3%
- 參數數量比原 YOLOv5s 減少 81.4%
- GFLOPs 上升 53.1%
將 P4 與 P5 兩層(共佔 92.1% 模型參數)移除,讓模型從淺層特徵(P2, P3)直接進行偵測。省略不必要的深層特徵,讓模型的關注點從宏觀語意,轉向微觀細節。
為避免參數不足導致模型退化,作者同步提高網路深度(0.33→0.67)與寬度(0.5→0.75),保留一定的抽象能力。
-
模組輕量化
-
LW_C3:
- mAP@0.5 +2.2%
- mAP@0.5:0.95 +1.9%
- GFLOPs 降低 48.2%
-
LW_Downsample:
- mAP@0.5 +3.9%
- mAP@0.5:0.95 +3.0%
- GFLOPs 降低 11.0%
這兩個模組雖然都增加了約 38.5% 參數,但 GFLOPs 明顯下降。這是因為動態卷積能夠提升表達能力的同時壓縮靜態運算量。
-
-
AMSFF
- mAP@0.5 +3.4%
- mAP@0.5:0.95 +2.6%
AMSFF 解決的是模型在多尺度特徵間的「對話失衡」問題,透過空間自適應權重學習,使淺層的細節與深層的語意得以合理分工。這對於小物體偵測特別關鍵,因為其語意信號本就微弱,若融合出錯,即會被放大為預測失誤。
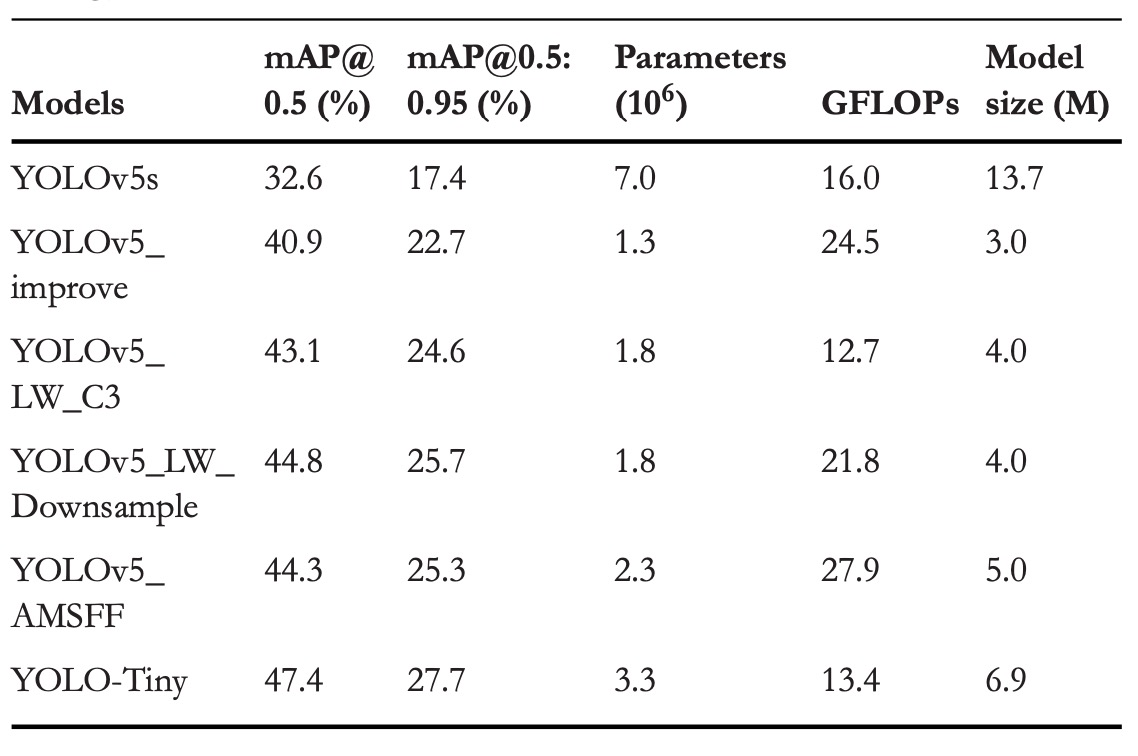
和其他 YOLO 比較
YOLO 系列一直是目標偵測領域的代名詞,它以端到端、極速推論的特性受到廣泛關注,從 YOLOv3 的多尺度預測與 Darknet-53 架構開始,到 YOLOv8 將梯度訊流導入特徵分支、YOLOv10 甚至直接拿掉非極大值抑制(NMS),每一代都有對準確率與效率的追求。
作者這裡針對目前主流 YOLO 模型中較小的版本進行對比,實驗結果顯示 YOLO-Tiny 這個模型在參數量與計算量大幅下降的前提下,卻依然交出了亮眼的準確率成績。
在 mAP@0.5 上分別比 YOLOv3-Tiny、YOLOv6s、YOLOv8s、YOLOv10s 提升了 23.7%、10.8%、8.3%、9.1%;mAP@0.5:0.95 的提升則為 14.4%、5.8%、4.2%、4.9%。同時,它也節省了 60% 到 80% 不等的參數量,與 30% 到 70% 的 GFLOPs。
可視化展示
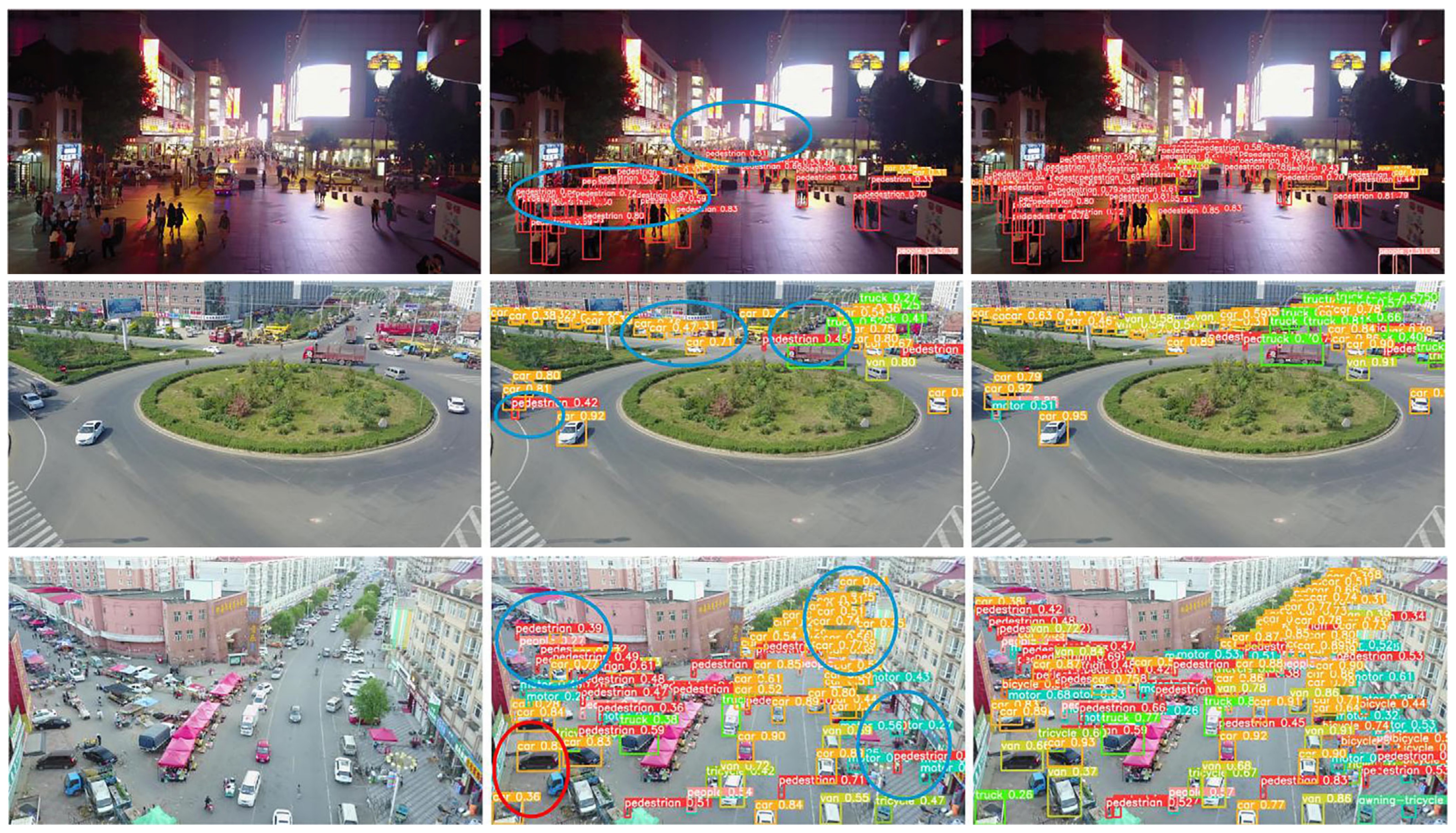
最左邊是原圖,中間是 YOLOv5s,最右邊是 YOLO-Tiny。
結論
面對無人機空拍下的極小目標與終端算力受限的部署條件,YOLO-Tiny 所提出的結構調整與模組設計,提供了一種具體可行的技術思路。
在過去的輕量化架構中,模型往往需要在速度與精度之間做出明確犧牲,特別是在 VisDrone 這類場景中,小物件特徵容易被多層下採樣稀釋,造成偵測準確率遲滯難升。
本研究透過刪減 P5、P4 等大物件偵測層,將網路焦點重置於 P3、P2 的小尺度範圍,搭配動態卷積與 AMSFF 模組進行訊號壓縮與特徵融合,企圖在不增加運算負擔的前提下,提升對小物件的辨識能力。
從實驗結果來看,這樣的策略確實在 VisDrone2019 上帶來顯著的 mAP 提升,並在模型參數與 GFLOPs 上保持優勢,說明其對小物件結構的設計具有一定針對性。
不過考慮到目前發表時間尚新,作者沒有公開訓練模組,相關模型尚未經歷公開實務部署與社群驗證,其實際效能與可泛化性仍有待後續觀察。