[15.12] SSD

省時省力省池化
SSD: Single Shot MultiBox Detector
Faster RCNN 依然是業界的標竿。
最常看到的標準作業流程大概是這樣:
- 邊界框提議(Bounding Box Proposal):使用 RPN 產生候選框。
- 對每個框重新取樣特徵(ROI Pooling)
- 送進分類器進行分類
定義問題
這些方法很準,但是計算量還是太大,特別對於一些嵌入是系統來說,即使用最快的檢測器 Faster RCNN,也大概只能達到 7 FPS。
作者認為效率瓶頸在於對每個候選框都要進行特徵提取和分類,或許......
我們可以省略這個步驟。
解決問題
模型架構
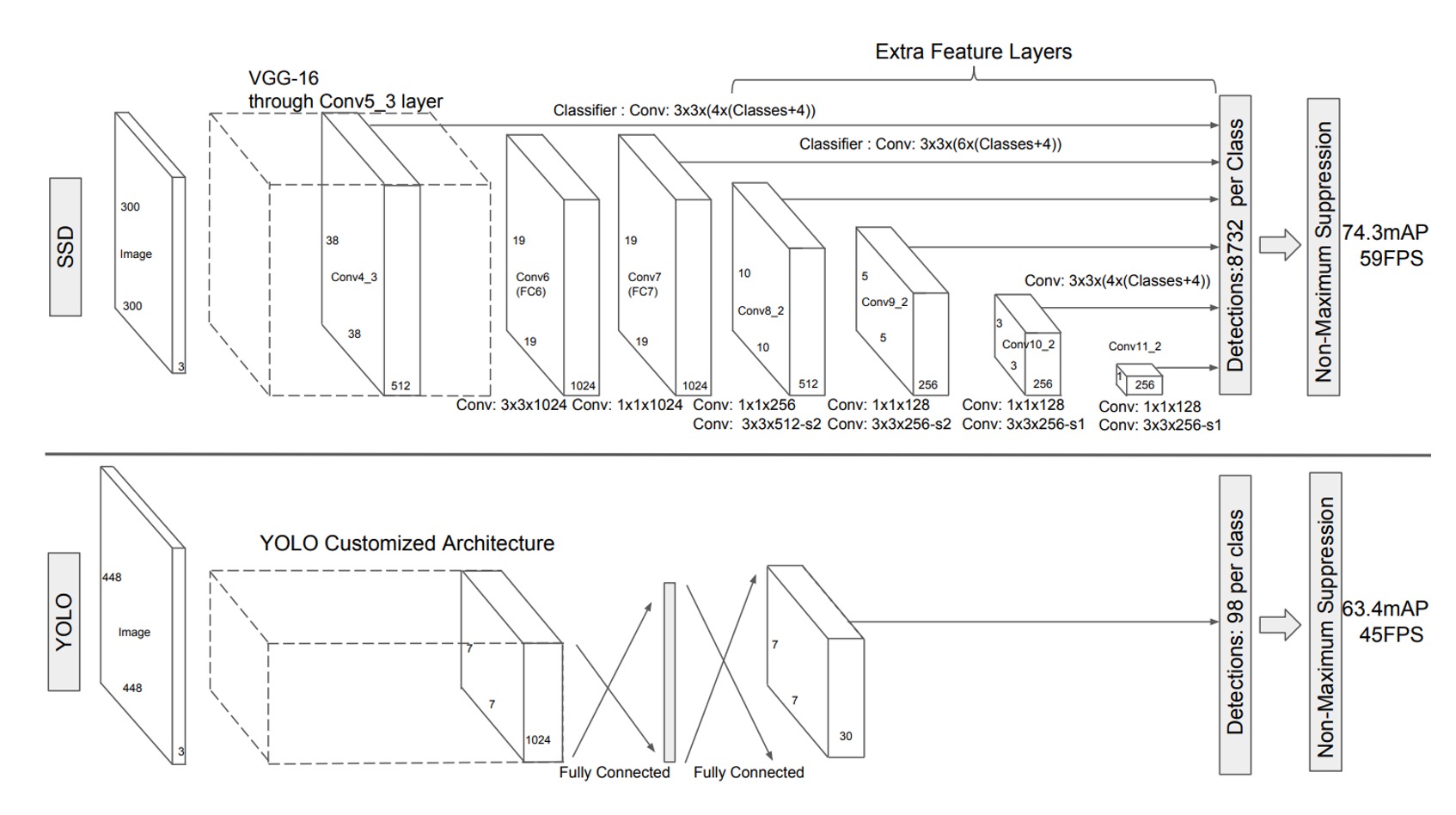
為了解決這個問題,作者提出了 SSD 架構,上圖是 SSD 和 YOLO-v1 的比較圖。
可以看到在 SSD 的設計中,完全捨棄了區域提議的步驟,改成直接從每個特徵圖的像素進行預測。
這個圖看起來可能比較抽象,我們分解一下:
-
首先使用 VGG 作為 Backbone,取出最 1/8 尺度特徵圖,尺寸是 。
這裡直接讓每個像素都預測「檢測框」,搭配不同的長寬比,共預測 4 個檢測框。
所以在這一層會預測 共 個檢測框。
提示在上圖中,你會看到輸出尺寸為 ,這裡的 表示每個檢測框預測的是「物體類別」(可能有 21 類或更多)和「邊界框」(Cx, Cy, W, H)。
-
接著對特徵圖做降採樣,得到 的特徵圖。
這裡跟上面不一樣,而是要預測 6 個檢測框,所以這一層會預測 共 個檢測框。
-
接著再做一次降採樣,得到 的特徵圖。
這裡預測 6 個檢測框,所以這一層會預測 共 個檢測框。
-
接著在做一次降採樣,得到 的特徵圖。
這裡預測 6 個檢測框,所以這一層會預測 共 個檢測框。
-
接著再做一次降採樣,得到 的特徵圖。
這裡預測 4 個檢測框,所以這一層會預測 共 個檢測框。
-
最後再做一次降採樣,得到 的特徵圖。
這裡預測 4 個檢測框,所以這一層會預測 共 個檢測框。
全部加起來: 個檢測框。
這不是我們在湊字數啊,因為看到論文中出現 這個數字,我們也好奇這是怎麼來的,所以就順手算了一輪。
在之後的研究中通常只會用到 1/8、1/16、1/32 這三層特徵圖,像 SSD 這樣一路用到 1/256 的特徵圖是比較少見的。
正負樣本匹配策略
在訓練期間,我們需要確定每個真實標記框對應的預測。
每個真實標記框需要從多個預測框中進行選擇,這些預測框會在不同位置、不同長寬比和不同尺度上排列。也就是說,預測框具有各種變化,以便涵蓋圖像中各種形狀和大小的物體。
在這裡,作者通過計算 Jaccard 重疊度(即交集與並集的比值,通常稱為 IoU, Intersection over Union)來決定哪些預測框與真實標記框匹配。
對於每個真實標記框,首先找到 IoU 最高的預測框,這樣能確保每個真實標記框至少有一個匹配的預測框。這一步是為了確保網路可以學習到如何正確地預測邊界框,因為每個真實標記框都有一個預測框與其匹配。
與過去的研究方法不同,SSD 在第一步匹配完成後,還會將所有 IoU 大於 0.5 的預測框與相應的真實標記框匹配。這種匹配策略的優點是它簡化了學習問題,允許網路對多個重疊的預測框進行預測,而不是強制網路只針對 IoU 最高的一個框進行預測。
這樣,當存在多個合適的預測框時,網路能夠更靈活地進行學習,提高預測的準確性。
訓練目標
SSD 的訓練目標基於 MultiBox 的目標函數,但進一步擴展為能處理多個物體類別。
具體來說,設 為一個指示變數,表示第 個預測框是否匹配第 個屬於類別 的真實標記框。在 SSD 的匹配策略中,每個真實框可以匹配多個預測框,因此 。
SSD 的總損失函數由定位損失(localization loss, )和置信損失(confidence loss, )的加權和組成:
其中, 是匹配的預測框數量,若 則損失設為 0。參數 通過交叉驗證設為 1。
-
定位損失(Localization Loss)
定位損失用 Smooth L1 損失來衡量預測的邊界框()與真實標記框()之間的差異。與 Faster R-CNN 類似,對預測框的中心點 以及寬度 和高度 進行回歸,公式如下:
其中,真實標記框的偏移量 計算如下:
提示這裡每一項都除以對應的預測框寬度 和高度 的原因,主要是為了夠將不同大小的物體回歸到相對尺度,避免大物體和小物體之間回歸差異過大。讓回歸問題更具穩定性和可學習性。
-
置信損失(Confidence Loss)
置信損失是基於 softmax 損失,用來度量預測的類別分數與真實類別之間的差異:
其中, 表示類別 的預測機率,計算公式為:
預測框的尺度與長寬比選擇
SSD 中的預測框尺度和長寬比是精心設計的,假設我們使用 個特徵圖來進行預測,則每層特徵圖的預測框尺度 的計算公式為:
其中,。這表示最低層特徵圖的預測框尺度為 0.2,最高層為 0.9,中間層的尺度按比例等距排列。
預測框設置了不同的長寬比,記作。
每個預測框的寬度與高度分別為:
此外,對於長寬比為 1 的預測框,還增加了一個額外的預測框,其尺度為:
因此,每個特徵圖位置總共產生 6 個預測框。
預測框的中心位置設置為:
其中, 是第 層特徵圖的大小,。
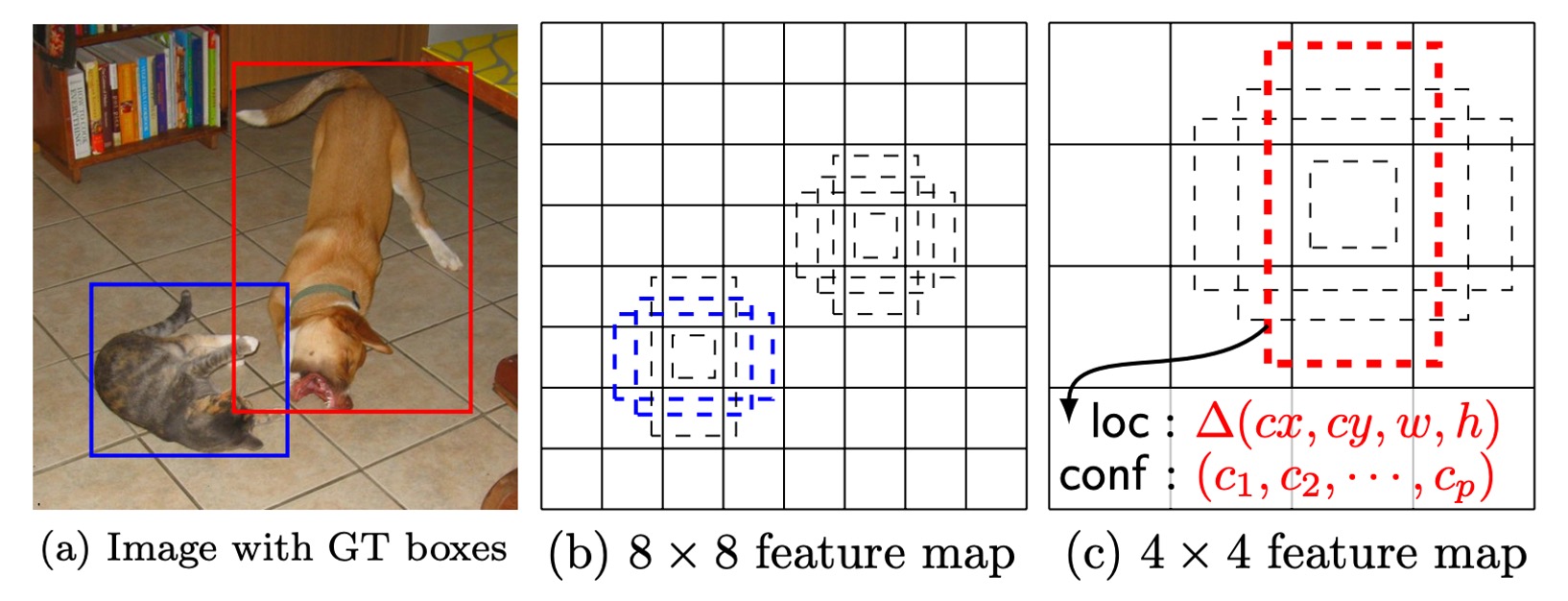
通過結合不同位置、不同尺度和長寬比的預測框預測,SSD 能夠覆蓋各種大小和形狀的物體。例如,在下圖中,狗的真實框與 4×4 特徵圖上的預測框匹配,但與 8×8 特徵圖上的預測框沒有匹配,因為後者的預測框尺度與狗的大小不符,因此這些預測框在訓練中被視為負樣本。
討論
作者對於模型設計的部分,進行了大量的分析,我們接著來看看他們的實驗結果。
數據增強
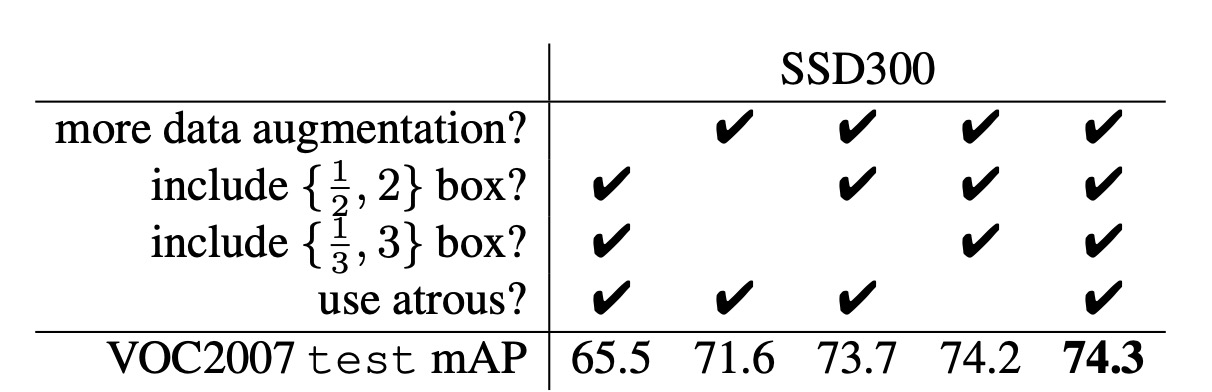
數據增強的部分,請看上表的第一個 Column 和最後一個 Column。
SSD 採用了與 YOLO 類似的更廣泛的採樣策略。這種數據增強策略使得 SSD 的性能(mAP)提升了 8.8%。其他方法可能難以充分利用這種策略,因為這些方法的特徵池化步驟(例如 ROI 池化)在設計上對物體的平移較為穩健,不易受到物體位移的影響。
多樣的預測框形狀
預測框的形狀設計對性能有顯著影響。
預設情況下,SSD 每個位置使用 6 個不同尺度和長寬比的預測框(1/3、1/2、1、2、3)。
- 當移除長寬比為 1/3 和 3 的預測框時,性能下降了0.6%。
- 當移除長寬比為 1/2 和 2 的預測框時,性能再下降2.1%。
這表明,使用多樣化的預測框形狀有助於網路更容易預測邊界框,從而提升準確性。
空洞卷積
SSD 採用了 Atrous 卷積 來提高速度。這種卷積使得網路在不增加計算量的情況下擴展了感受野。使用 Atrous 卷積的子採樣 VGG16 版本比全 VGG16 版本速度快了 20%,而性能幾乎保持不變。
這表明,通過在較高層使用空洞卷積,可以在不犧牲準確性的前提下顯著提高速度。
類別分析
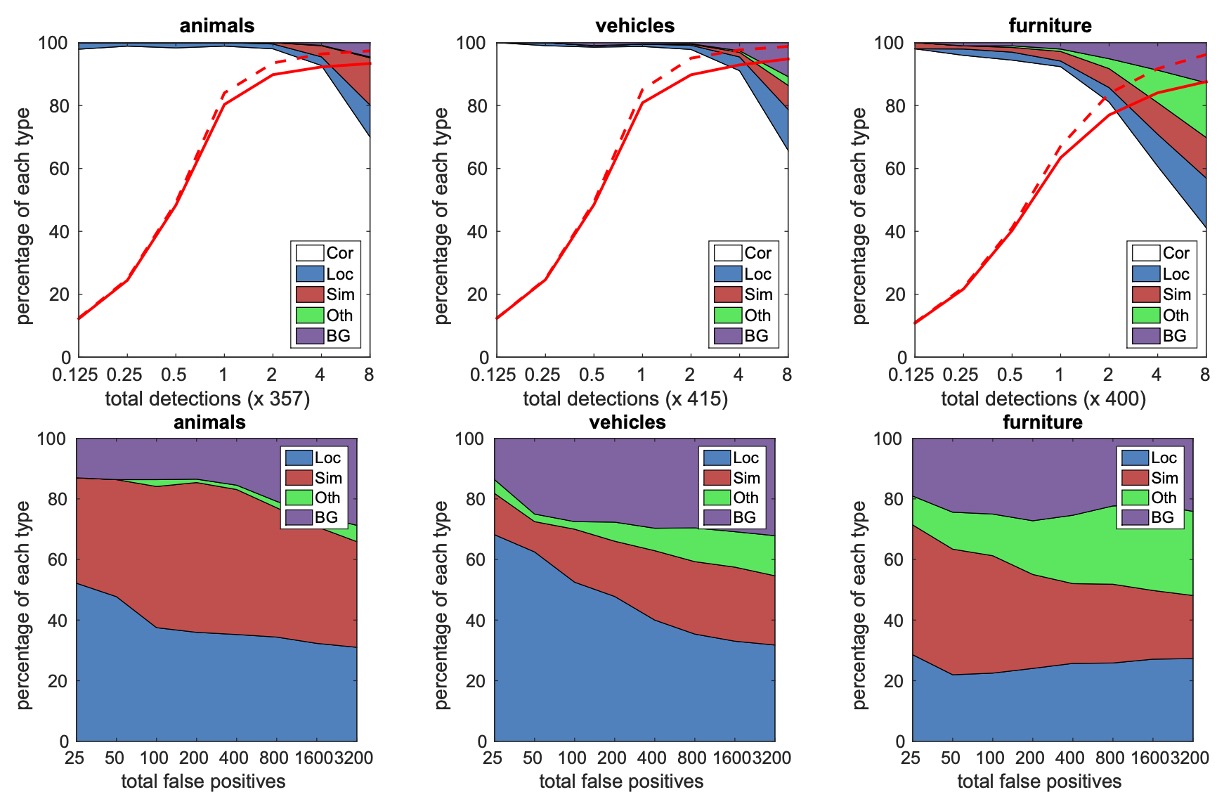
作者對不同類別(如動物、車輛、家具)進行了詳細分析,並研究了假陽性(false positives)在不同類別中的分布情況。
上層圖展示了隨著檢測數量增加,正確檢測與假陽性之間的比例變化。SSD 在高重疊度(0.5 IoU)下的召回率較低,但在弱標準(0.1 IoU)下召回率提升顯著。
下層圖展示了在不同類別中的假陽性類型,包括由於定位不準確(Loc)、與相似類別混淆(Sim)、與其他類別混淆(Oth)以及背景(BG)誤檢。
這些圖表展示了 SSD 模型在不同物體尺度、長寬比和分類中的敏感性。
物件尺寸分析
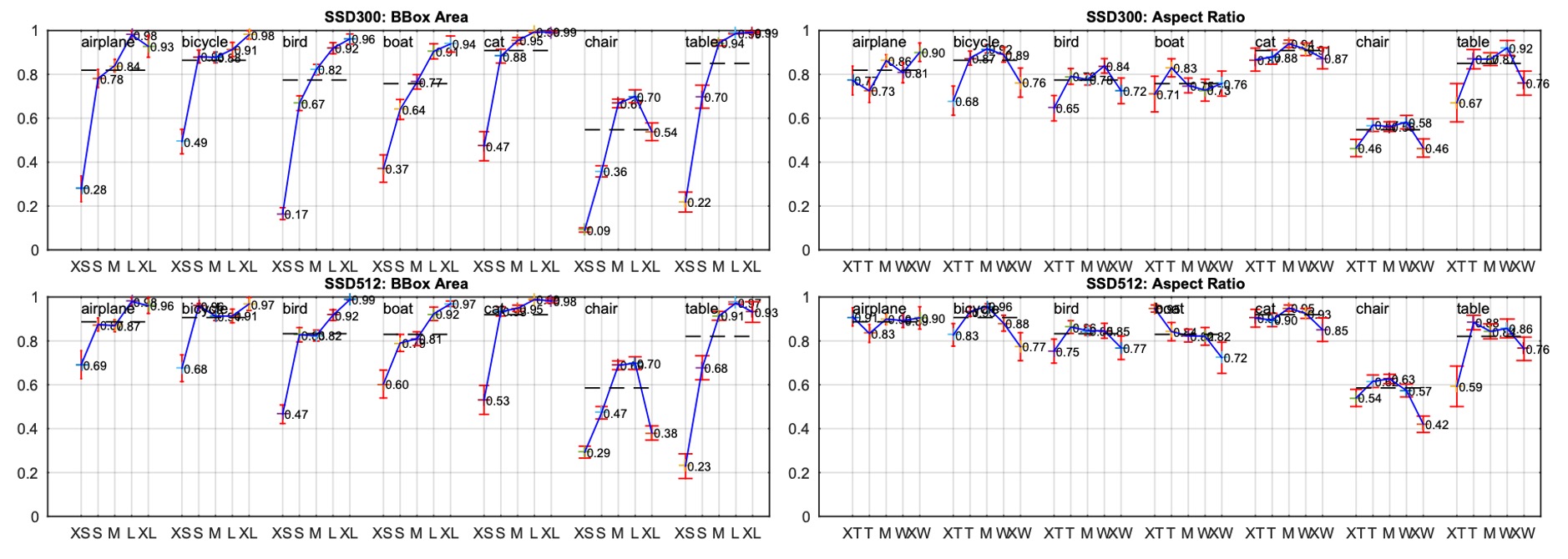
作者也探討了物體邊界框面積和長寬比對模型性能的影響。
不同物體類別在不同尺寸的邊界框上的表現有所不同,SSD 對中小型物體的檢測表現稍差,對大物體的檢測效果較好。長寬比的不同對各類物體的檢測性能也有所影響,長寬比過大的物體或過小的物體會影響準確性。這也顯示了在設計預測框時需要考慮長寬比的多樣性。
COCO 數據集上的表現
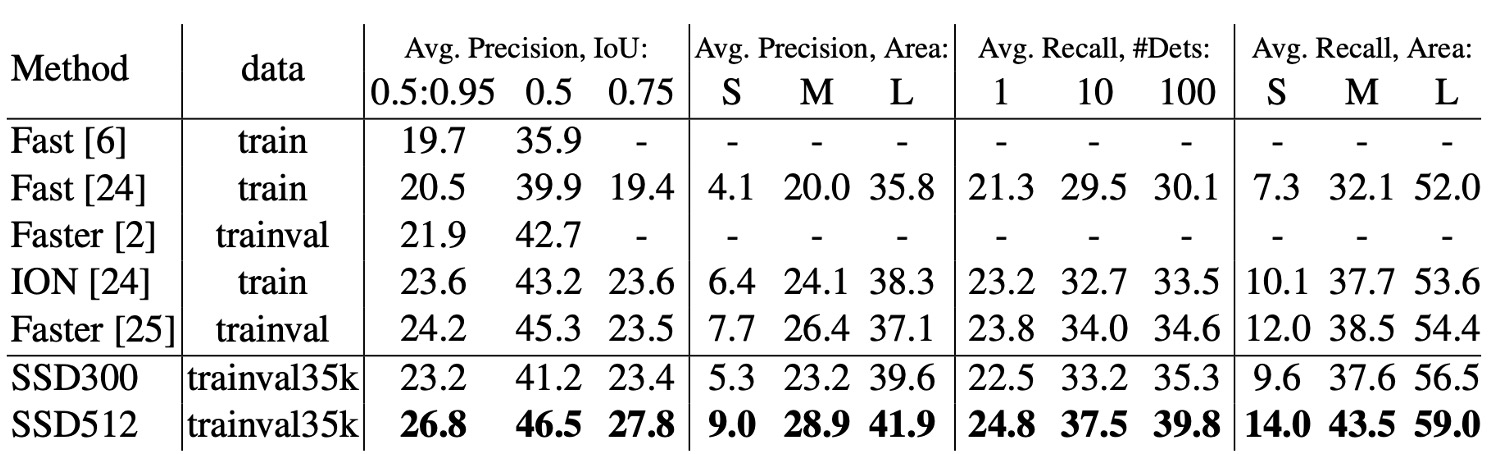
COCO 數據集中的物體通常比 PASCAL VOC 數據集中的物體要小,因此 SSD 在 COCO 上訓練時,選擇了更小的預測框來適應這些小物體。
- 預測框的最小尺度( )從 0.2 縮小到 0.15,對於 conv4_3 層的默認框尺度更小,為 0.07(在 300×300 圖像中相當於 21 像素)。
- 對於 SSD512 模型,進一步調整預測框的最小尺度( )到 0.1,並在 conv4_3 層上設定為 0.04。
- SSD300 和 SSD512 模型的訓練數據來自 trainval35k 數據集。
- 模型的訓練過程分為三個階段:首先使用學習率 進行 16 萬次迭代,接著用 進行 4 萬次迭代,最後用 再進行 4 萬次迭代。
SSD300 在 COCO 上的 mAP@0.5 和 mAP@[0.5:0.95] 都優於 Fast R-CNN。SSD300 的 mAP@0.75 與 ION 和 Faster R-CNN 相當,但在 mAP@0.5 上略遜於 Faster R-CNN。
當圖像大小增大到 512×512 時,SSD512 在 mAP@0.5 和 **mAP@[0.5:0.95]**上 均超過了 Faster R-CNN。SSD512 在 mAP@0.75 上表現突出,比 Faster R-CNN 高出 5.3%,但在 mAP@0.5 上的提升較小,僅為 1.2%。
SSD512 對大物體的平均精度(AP)和平均召回率(AR)有較大提升,AP 提升了4.8%,AR 提升了4.6%。這表明 SSD512 能夠更好地處理大物體。但 SSD512 在小物體上的提升較為有限,AP 僅提升了1.3%,AR 提升了2.0%。這表明 SSD 在處理小物體時效果相對較弱。
可視化結果

結論
SSD 最大的優勢在於不需要生成候選區域,直接從網路中提取特徵進行物體偵測。這能夠在保證準確率的前提下顯著提高速度。SSD-300 能夠以每秒 59 幀的速度進行推論,這比同時期的 YOLO-v1 還要更快更準。
另外,SSD 使用來自多個特徵圖的輸出進行多尺度物體偵測。這樣的設計可以讓模型對不同大小和形狀的物體進行有效檢測。
SSD 作為一種高效的物體檢測方法,值得我們深入研讀。