[19.04] FCOS

沒有錨點的世界
FCOS: Fully Convolutional One-Stage Object Detection
這篇論文有七千多個引用。
經典論文,我們一定得來看一看。
定義問題
物件偵測的主流方法,長期以來被 anchor-based 所壟斷。
從 Faster R-CNN、SSD 到 YOLOv2/v3,大家都圍繞著錨點設計:先鋪設一大堆候選框,再判斷誰是正樣本、誰是負樣本。
這種設計雖然實用,但也帶來不少隱憂:
- 超參數繁多:錨點的大小、比例、數量,以及 IoU 門檻,都需要手工調整。稍有變動,mAP 就可能差個 4% 以上。
- 泛化性差:錨點的形狀是固定的,遇到尺度差異大或特殊形狀的物件時,表現會明顯下滑,更別說換任務還得重新設計。
- 正負樣本失衡:為了保證召回率,往往需要在整張圖上鋪設成千上萬的錨點,其中絕大多數都是負樣本,訓練因此極度不平衡。
- 計算繁瑣:從 IoU 計算到匹配規則,錨點引入了額外的計算與複雜度。
雖然 anchor-free 也不是新鮮事,但每個方法的缺陷都非常明顯。
舉例來說,YOLOv1 嘗試直接從物件中心預測邊界框,但是只依靠中心點,導致召回率不足;CornetNet 用角點來拼湊物件,但是後處理過於複雜;DenseBox 則是採用逐像素回歸的機制,但是難以處理框重疊的問題,幾乎只能勉強用在文字或人臉偵測等特殊領域。
還有更多的例子,不勝枚舉。
Anchor-free 的架構在整體表現上就是矮人一截,在物件偵測這個已經被 anchor-based 主宰的領域中,根本沒有立足之地。
難道物件偵測是否真的離不開 anchor?
本篇論文的作者希望能夠打破這個僵局,他希望模型能像語意分割一樣,讓每個像素都參與預測,既不需要 anchor,也不需要額外的匹配規則。
所謂的物件偵測,應該要回到 全卷積 per-pixel 預測 的簡潔範式。
解決問題
FCOS 的核心觀點,是將物件偵測徹底改寫為 per-pixel prediction 的問題。與其鋪設大量 anchor,讓它們作為「候選人」去比對真值框,FCOS 乾脆直接把每個像素位置視為一個訓練樣本。
假設我們在 backbone 的第 層得到特徵圖 ,stride 為 。
輸入影像的 ground-truth 邊界框記為
其中 與 分別是左上角與右下角座標, 為類別標籤。
對於特徵圖上的一個位置 ,我們可以將它映射回輸入影像座標:
這個位置如果落在某個真值框 內,我們就把它視為正樣本,並指定其分類標籤 ;反之則為背景 。
除了分類之外,每個位置還需要回歸一個四維向量:
分別表示該位置到框的左、上、右、下邊界的距離,如下圖:
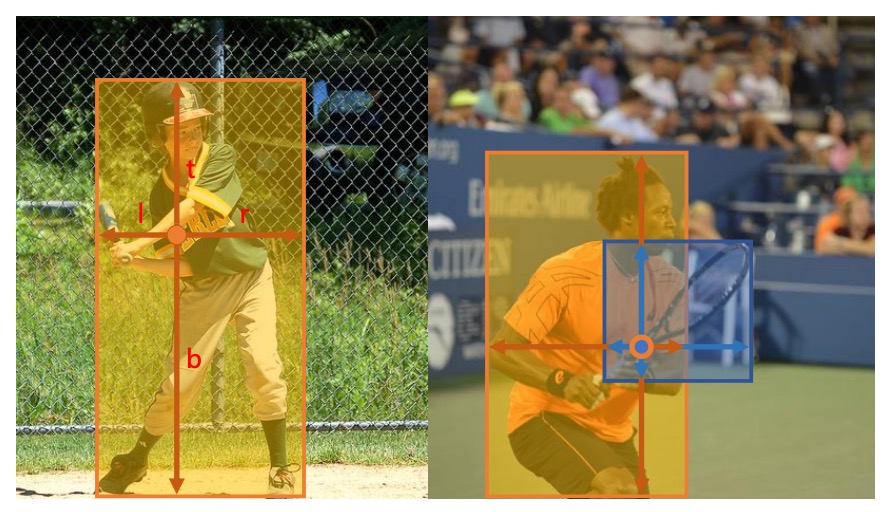
如果某個位置同時落在多個框中,則取面積最小的框作為回歸目標,以減少重疊的歧義。
這樣一來,每個像素就能直接輸出「這裡是什麼」與「框到哪裡」,不再需要 anchors 來參考。
在網路輸出設計上,最後一層會同時輸出分類分支 與回歸分支 。
由於回歸值必須是正數,作者在輸出端使用 將任意實數映射到 。
這樣的設計不僅簡化了結構,還讓輸出變數的數量比 anchor-based detector 少了九倍。
整體的 loss 定義為:
其中 採用 Focal Loss 以平衡正負樣本, 則是 IoU loss, 是正樣本數量,。
推論時,對於每個位置 ,我們得到其分類分數 與回歸結果 ,只要 就會被視為候選框,並透過反向轉換復原為實際座標。
到這裡,我們已經可以理解 FCOS 最核心的思想:把 anchor 拿掉,讓每個像素直接負責預測。
然而,這樣的設計馬上遇到兩個挑戰:
- 特徵圖 stride 過大可能導致小物件被忽略,召回率下降;
- 重疊框會造成歧義,到底某個像素該回歸哪個框?
作者的解法是 FPN 多層級預測,如下圖所示:
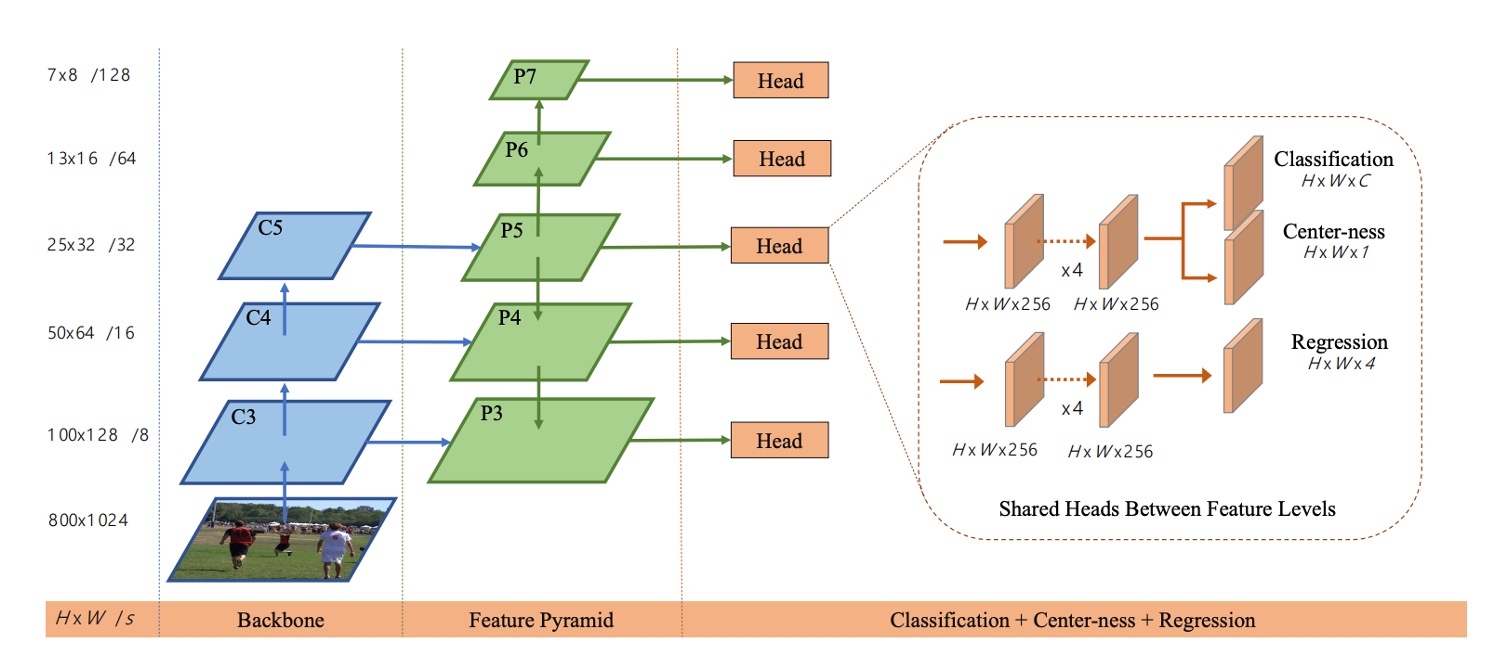
作者利用 五個層級,stride 分別為 8、16、32、64、128。
不同尺寸的物件會被分配到不同的層級進行回歸,並且透過設定每層的最大回歸範圍(例如 處理 的物件, 處理 的物件),大幅減輕了重疊歧義。
即使如此,還有最後一個問題需要處理:遠離中心的像素,往往會產生低品質的框。
為此,作者引入了一個輕量的 center-ness 分支,用來衡量一個位置距離中心的偏離程度。
對於位置 ,其對應的目標定義為:
這個值介於 之間,越靠近物件中心越接近 1。
訓練時使用 BCE loss,推論時則將其與分類分數相乘,用來抑制低品質的框,並在 NMS 前就過濾掉大量「邊角預測」。
最終,FCOS 以最簡單的 per-pixel 設計,搭配 FPN 的多層級分配與 center-ness 的品質控制,不僅徹底擺脫 anchor,也展現了能與主流 anchor-based 方法比肩,甚至超越的性能。
討論
作者在 MS COCO 基準上驗證 FCOS,遵循通用做法,訓練使用 trainval35k(115K),驗證在 minival(5K) 做消融,主結果提交 test-dev(20K)。
除非特別說明,Backbone 為 ResNet-50,優化器與超參數沿用 RetinaNet 設定:SGD、90K iterations、batch size 16、初始學習率 0.01,於 60K 與 80K iteration 各降 10 倍,weight decay 0.0001、momentum 0.9,輸入影像短邊 800、長邊不超過 1333。
推論同樣沿用 RetinaNet 的後處理與超參數,候選位置門檻為 ;若專為 FCOS 微調,表現仍可進一步提升。
在進一步分析前,我們先看一下 Best Possible Recall(BPR) 的精確定義,便於閱讀表格:
多層級 FPN 與可召回上限
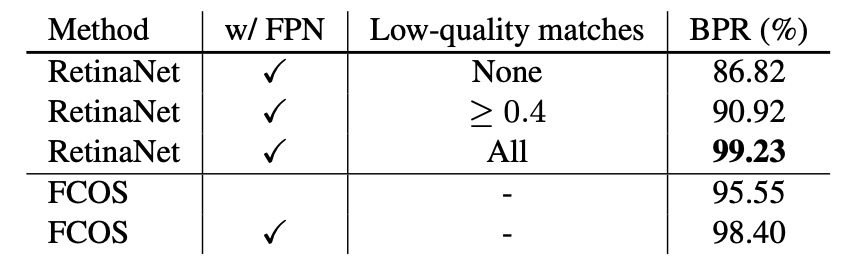
首先,作者考慮到 FCN 型偵測器 stride 較大、可能導致召回不足,因此以單層 P4(stride 16) 檢驗:僅此一層時,FCOS 仍可達 BPR = 95.55%,顯著高於官方 Detectron 版 RetinaNet(低品質配對 IoU≥0.4)之 90.92%。
接著,引入 FPN(P3–P7) 後,FCOS 的 BPR 進一步到 98.40%,已逼近以各式低品質配對堆高召回的 anchor-based 上限。
鑑於實際偵測器在 COCO 的最終召回遠低於 90%,這不到 1% 的 BPR 差距不構成瓶頸;事實上,隨後的主結果中 FCOS 的 AR 亦優於對手。
重疊造成的歧義樣本

當多個 GT 框在空間上重疊,per-pixel 指派可能出現「同一位置該回歸哪個框」的歧義。
若只用 P4,minival 的歧義樣本佔所有正樣本 23.16%;引入 FPN 後,由於不同尺寸物件被分派到不同層級,歧義大幅降到 7.14%。更進一步排除「同類別重疊」(這種重疊不影響分類正確性),跨類別的歧義比率由 17.84% 降至 3.75%。
推論時實際由「歧義位置」產生的偵測框僅 2.3%,若僅計跨類別更降至 1.5%。
因此,透過 多層級指派 + 面積最小規則,歧義對最終性能的影響可忽略。
Center-ness 的必要性與效果
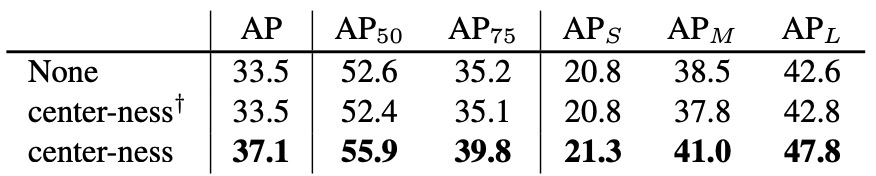
即便有了 FPN,遠離物件中心的像素仍容易產生低品質框。
為此,FCOS 在分類分支旁加入一個單層 center-ness 分支,預測位置到中心的歸一化偏離:
訓練時以 BCE 監督;推論時用 來抑制邊角預測,NMS 前即過濾掉大量低品質候選。
消融實驗結果顯示如上表,AP 從 33.5% 躍升到 37.1%;若僅用「由回歸結果推算的 center-ness」而不設獨立分支,則無法帶來相同提升,證明獨立分支是必要的。
與 Anchor-based 的公平對比
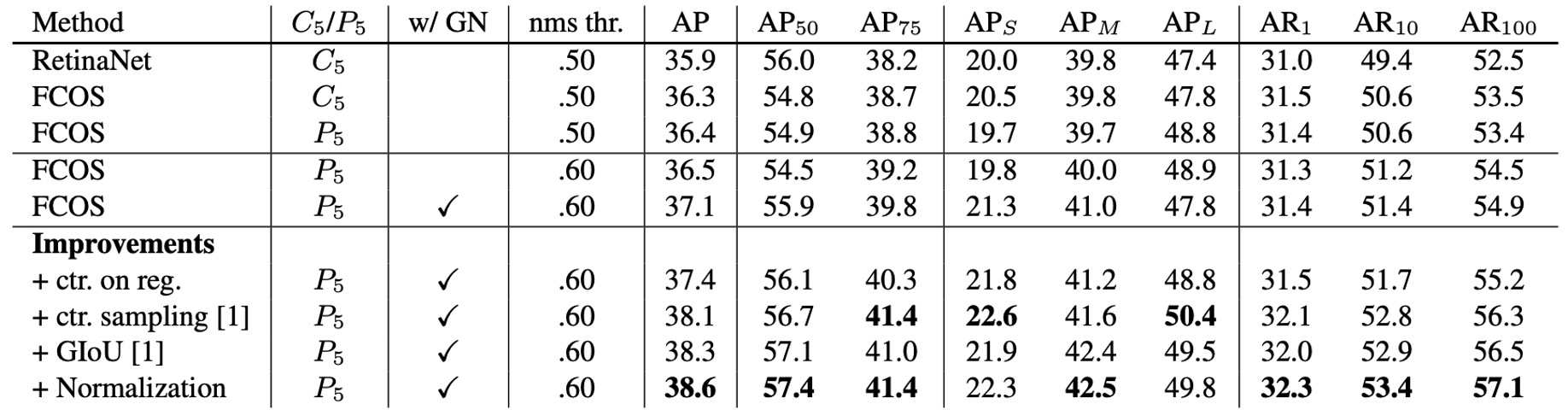
為排除實作差異,作者將 FCOS 調整到與 RetinaNet 幾乎一致的設定:移除 GroupNorm(改以梯度裁剪保穩定)、以 C5 而非 P5 生成 P6/P7。
即便如此,FCOS 依然 36.3% vs 35.9% AP 略勝 RetinaNet。在此對比中,學習率、NMS 門檻等超參數完全沿用 RetinaNet(對 anchor-free 未特調),顯示架構本身的簡潔與指派策略才是關鍵。作者也指出,若允許對 FCOS 量身調參,還有上升空間。
與當代 SOTA 的整體比較
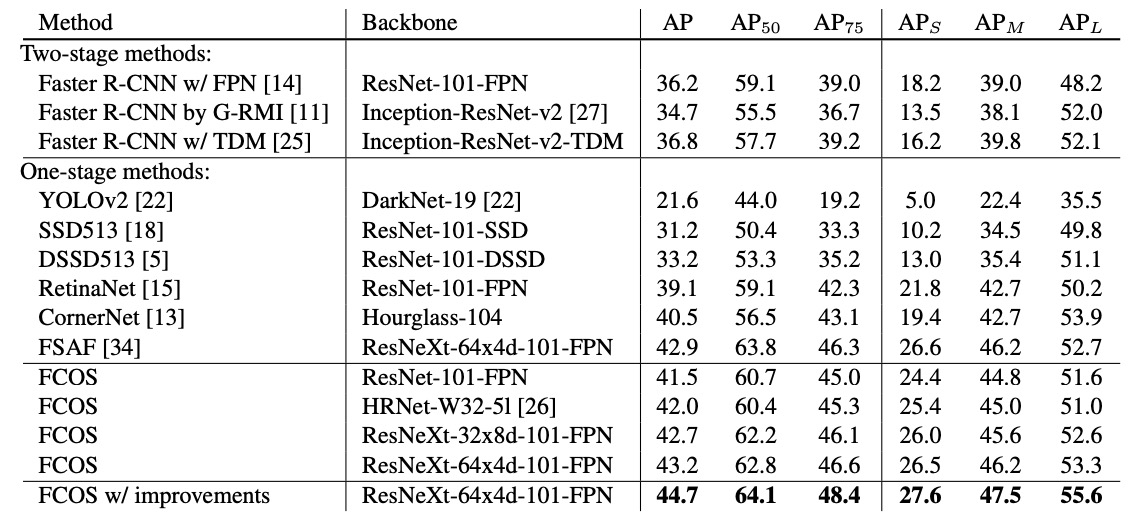
實驗結果顯示:在 ResNet-101-FPN 下,FCOS 較 RetinaNet +2.4 AP;以 ResNeXt-101-64×4d-FPN 為 Backbone,FCOS 達 AP 43.2%,明顯超越同為 anchor-free 的 CornerNet,且系統更簡潔(CornerNet 需學習角點成對與嵌入聚合)。
結合上表中的幾項 幾乎零成本 改進後,單模型、單尺度測試可達 AP 44.7%。這是 首次 在無花招的前提下,anchor-free 以顯著幅度超越 anchor-based 的結果。
結論
FCOS 把物件偵測拉回 per-pixel 的樸素範式:不需要 proposals、也不需要 anchors。每個位置同時學會「它是什麼」與「框到哪裡」,並以 FPN 的多層級分配化解尺寸與重疊的歧義,最後用一個近乎零成本的 center-ness 來校正品質。
FCOS 的影響主要體現在三個層面。
其一,任務對齊與樣本指派 的觀念被徹底放大:從 ATSS 的統計式指派,到 PAA/OTA/SimOTA 的動態或全域最佳化分配,再到 TOOD 的分類-定位一致性,都在沿著「像素(或位置)= 樣本」的思路前進。
其二,品質感知的分類頭 演化出多條支線:center-ness 被更普遍的「IoU/品質感知分類」所吸收(如 QFL/Varifocal 等),而框回歸也從純連續值走向分佈式回歸(如 DFL),本質上都是在用更平滑的方式把定位品質注入分類分數。
其三,Transformer 系列(DETR、Deformable-DETR、DINO、RT-DETR 等)以集合匹配重塑了偵測流程,拿掉 NMS 與 anchors,建立了另一條強力路線;但在實時與邊緣部署的場景,FCOS 這類卷積式、頭部輕量的設計仍然是穩健、易調的基線,也啟發了近年的 anchor-free YOLO 家族(如 v8/10/11)的任務對齊與品質建模細節。
總之,FCOS 的貢獻並不限於「拿掉 anchors」這件事,而是把偵測問題重新表述為:讓每個位置自主承擔決策,並用正確的指派與正確的評分,讓好框自然顯現。
至此之後,錨點的設計架構退場,而留下來的是更清晰的問題定義和更通用的設計語言。