[20.05] DETR

跨領域的奠基者
End-to-End Object Detection with Transformers
物件偵測一直都是電腦視覺領域的核心任務。
定義問題
在物件偵測的領域中,Anchor-base 的方法是近年來相當流行的偵測技術。像是 Faster R-CNN、SSD 或 YOLO 這類架構,會事先在影像上撒下一組預定義的邊界框,再針對每個錨點進行類別分類與框回歸。
這樣的設計雖然有效,卻也引入了不少問題:
- 錨點的尺寸與比例需依據資料集特性手動設計,泛用性有限。
- 每個位置對應多組錨點,導致大量重複預測,需要依賴 NMS 來過濾。
- 框與真實標註的對齊過程繁瑣,訓練流程高度耦合。
覺得不好用?
那我們不用錨點行不行?
也不是不行,Anchor-free 的架構也為此而生。
但是實務上的場景中,人們除了準確,還是要準確!使用者通常可以忍受慢一點(反正也就差幾秒);系統可以複雜一點(反正是工程師在忙)。
但是模型不準確,我就要投訴你!
Anchor-free 的架構普遍來說精度不佳,在物件偵測的基準上無法帶來亮眼的表現。
話又說回來,在此時此刻的同一個時間線中,隔壁棚(NLP)的已經如火如荼的推進著最新的 Transformer 架構,並且取得很多顯著的進步成果。
本論文的作者覺得:
我們為什麼不捨棄這些繁複的機制,大家一起來 Transformer 一下呢?
解決問題
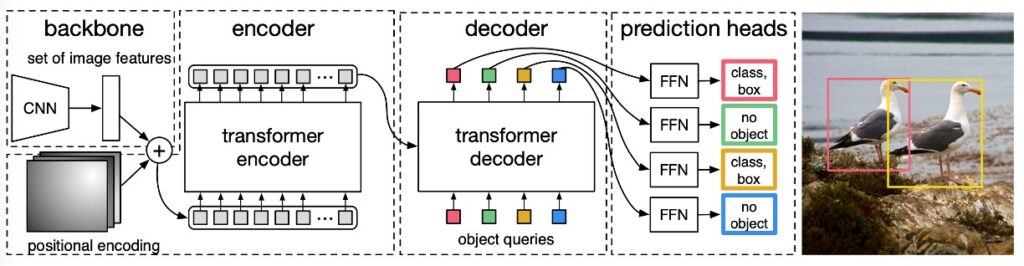
整體架構如論文如上圖所示,由三個部分組成:
- CNN backbone:從輸入圖像擷取特徵圖。
- Transformer encoder-decoder:建模圖像整體上下文與物件間關係。
- Prediction Head(FFN):輸出 box 與 class。
模型架構
首先看 Backbone 的部分。
Backbone 輸入圖像 經由 CNN backbone 輸出 (如 ResNet50,通常 ,)。
透過 卷積將 channel 降至 維(如 ),得到特徵圖 ,接著 flatten 成序列長度 的向量送進 Transformer encoder。
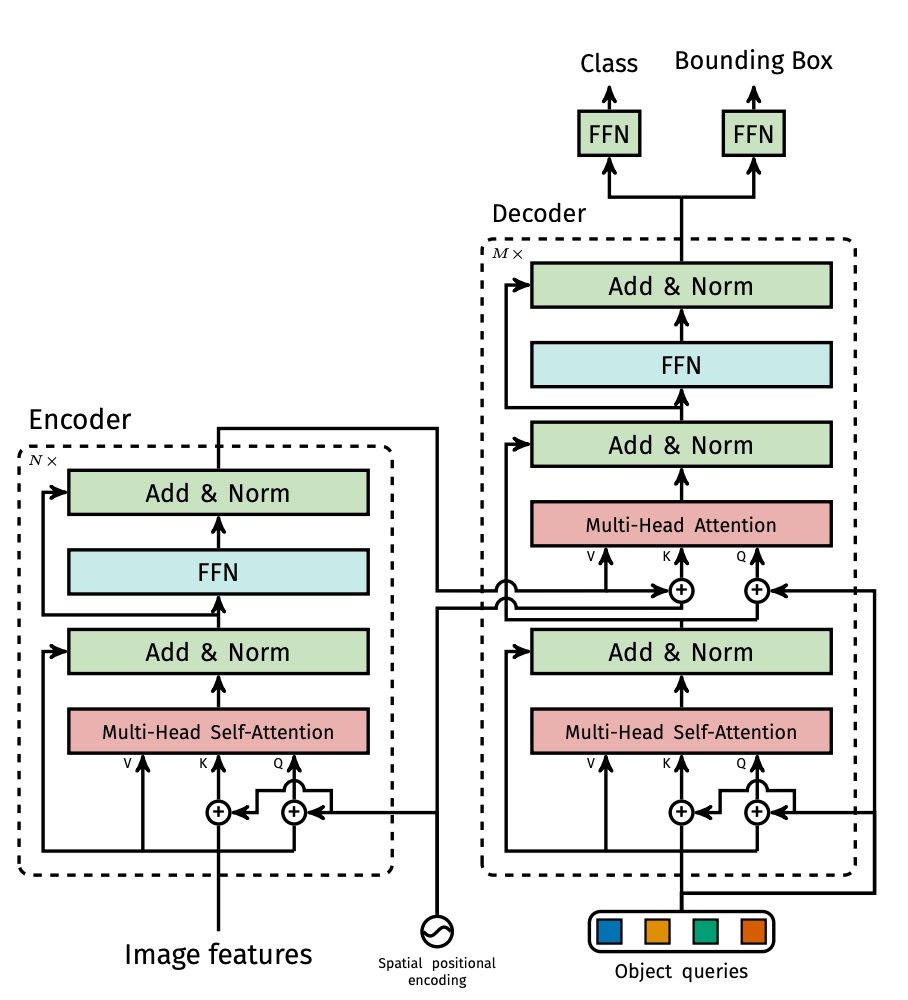
Transformer Encoder 就是常見的標準結構,每層包含 MHSA + FFN。此外,由於 transformer 的 token 之間沒有明確的位置關係,因此這裡作者在輸入階段加上固定的 positional encoding(如 sine/cosine 編碼)。
接著是 Transformer Decoder 的部分,輸出採用同步輸出 個物件,要注意這裡不是採用自回歸的機制,因為每個物件之間不存在強依賴關係,因此可以直接平行輸出。
每個輸出位置對應一組 learnable 的 object query(),讓多層 decoder 透過 self-attention 與 encoder-decoder attention,讓 object query 彼此間互相溝通,也與圖像特徵對齊,藉此讓模型具備跨物件全局推理能力(例如同時考量物件的相對關係與整體分布)。
最後是預測頭的部分,每個 decoder 輸出的 結點都接一個 3 層的前饋網路,輸出:
- 類別(softmax over K+1,其中 +1 是 "no object" 類別)。
- 邊界框座標(normalized 的中心點、長寬)。
這裡預測的是一組「固定長度的候選框集合」,非傳統 dense grid 或 anchor 框,因此可用集合損失來訓練。
損失設計
過去物件偵測的訓練流程,幾乎都繞不開「預測框要對齊哪個 ground truth?」這個問題。
像是 Faster R-CNN 使用 IoU > 0.5 的 proposal 才算 positive,YOLO 系列會先找出 anchor 框中最接近的對象,這些都算是「啟發式規則(heuristic assignment)」,目的就是:把預測結果對齊真實標註,才有辦法訓練分類與回歸。
而 DETR 則乾脆把這件事視為一個最佳化問題:直接用 Hungarian Algorithm 做最佳配對,強制每個預測對應唯一的 ground truth,避免重複預測、重疊框、還有繁瑣的後處理規則。
-
Step 1:最佳匹配(Bipartite Matching)
提示匈牙利算法的介紹可以獨立寫一篇文章,我們就不再贅述。如果對這個算法不熟的讀者可以參考以下連結:
假設:
- 是 ground truth 物件集合。其中每個 ,含類別與 bounding box。
- 是 decoder 輸出的預測集合,其中 ,且
為了做集合比對,作者把 補上 個 "no object"(記作 ),讓兩組集合一樣長,然後設計一個匹配成本函數 ,計算預測與真值之間的誤差:
這裡的 是 個預測的排列組合,目的就是在找最好的「一對一」對齊方式。
-
Step 2:定義匹配成本
每一對 和預測 的成本由兩部分構成:
- 分類誤差(classification cost):預測類別 越小,成本越大
- 邊界框誤差(box cost):預測框 與真實框 差距越大,成本越大
但要注意:只有當 時才需要這兩項損失,也就是對應到有物件的情況。
綜合起來:
這邊沒有使用 log 機率,因為作者希望這個匹配成本與 box loss 的尺度一致,這樣在做最佳化時不會某一方壓過另一方。
-
Step 3:計算最終損失(Hungarian Loss)
完成匹配後,就可以計算 loss 了:
- 第一項是分類 loss:對應物件的類別機率越低,loss 越大
- 第二項是 box loss(見下節)
- 若 ,表示這是個背景,作者會將分類 loss 乘上 0.1 做 down-weight,避免背景樣本太多壓過有物件的訊號(類似 Faster R-CNN 的 subsampling)。
-
Step 4:Box Loss 設計()
DETR 並不像 YOLO/Faster R-CNN 預測相對偏移量,而是直接預測 bounding box 的絕對座標(normalized)。這種設計簡單,但會導致一個問題:
由於 loss 衡量的是絕對距離,相對誤差相同時,小框所承受的損失將顯著高於大框。
為了解決這個問題,作者結合了兩種損失函數:
- loss:直接計算座標差距,對於位置精度有幫助
- Generalized IoU(GIoU)loss:量化框之間的重疊程度,且具有尺度不變性
合併公式如下:
- 與 為權重超參數,需調參。
- 所有 loss 都會除以 batch 內物件總數作 normalization。
最後,總結一下這套損失設計的幾個重點:
- 一對一匹配:只預測一次,不重複、不疊框,完全免後處理
- 背景處理簡潔:用 類別處理背景,無需 dense negative sampling
- GIoU + 的組合:同時平衡位置與重疊度的學習
這也是為什麼 DETR 雖然在架構上看似簡單,但在訓練流程中能夠真正實現 end-to-end 物件偵測的核心關鍵。
資料集
本研究在 COCO 2017 資料集上進行實驗,涵蓋物件偵測與全景分割兩項任務。資料集共包含 118,000 張訓練影像與 5,000 張驗證影像,每張影像皆標註有邊界框與全景分割資訊。
影像中平均包含 7 個物件實例,最大可達 63 個,物件尺寸變化大,小物件與大物件並存,是極具挑戰性的設定。
模型表現以 Average Precision(AP)為主指標,預設計算方式為邊界框 AP。在與 Faster R-CNN 比較時,作者取用訓練最後一個 epoch 的驗證結果;若為消融實驗,則報告最後 10 個 epoch 的中位數。
技術細節
模型訓練採用 AdamW 優化器,Transformer 的初始學習率為 1e‑4,backbone 則為 1e‑5,權重衰減設為 1e‑4。
Transformer 的權重經 Xavier 初始化,backbone 採用 ImageNet 預訓的 ResNet 模型,並凍結 BatchNorm 層。
作者評估了多種 backbone 組合,包括標準的 ResNet‑50(DETR)與 ResNet‑101(DETR‑R101),以及在最後一層加入 dilation、放大特徵解析度的 DC5 變體(DETR‑DC5 與 DETR‑DC5‑R101)。DC5 設計能提升小物件偵測表現,但 encoder 中的自注意力計算量亦相對提升 16 倍,整體 FLOPs 約增加 2 倍。
訓練時使用多尺度增強策略,將影像最短邊縮放至 480–800 像素之間,最長邊不超過 1333 像素。為了增強模型的全域關聯學習能力,訓練時額外採用隨機裁剪增強(以 0.5 機率裁切隨機區塊再縮放回原尺度),實驗顯示可額外提升約 1 AP。
此外,推論階段也引入一項簡單但有效的策略:對於預測為「no object」的插槽,若第二高分的類別具合理信心,即以其取代原本預測,能進一步帶來約 2 AP 的提升。整體訓練使用 dropout 0.1,其他超參數細節可參考論文附錄 A.4。
討論
這次行嗎?
小物件整個壞掉(:27.2 → 23.7),但整體看起來似乎還行。
如果我們仔細比對 DETR 與 Faster R-CNN 的訓練條件與模型表現,可以觀察到幾個關鍵點:
-
訓練策略的根本差異
DETR 採用 Transformer 架構,自然地搭配 AdamW 或 Adagrad 等適用於稀疏更新的優化器,同時依賴較長的訓練排程與 dropout 穩定學習。
而傳統的 Faster R-CNN 通常使用 SGD 搭配較保守的資料增強策略。在設計上,兩者的方向截然不同。
-
為公平比較所做的調整
為了讓 Faster R-CNN 能在對等條件下競爭,作者對其進行了幾項強化,包括:
- 在 box loss 中加入 generalized IoU;
- 套用與 DETR 相同的隨機裁切資料增強;
- 將訓練週期延長至 9×(109 個 epoch)。
這些調整整體帶來約 1–2 AP 的提升,使其能與 DETR 模型有實質對照的基準線。
-
模型設計與參數量對齊
DETR 採用 6 層 encoder + 6 層 decoder、寬度 256、8-heads 的設定,總參數數量與 Faster R-CNN + FPN 持平,約 41.3M,其中 ResNet-50 占 23.5M,Transformer 占 17.8M。這樣的設計確保了兩者在「模型容量」上有公平的比較基礎。
-
實驗結果與關鍵觀察
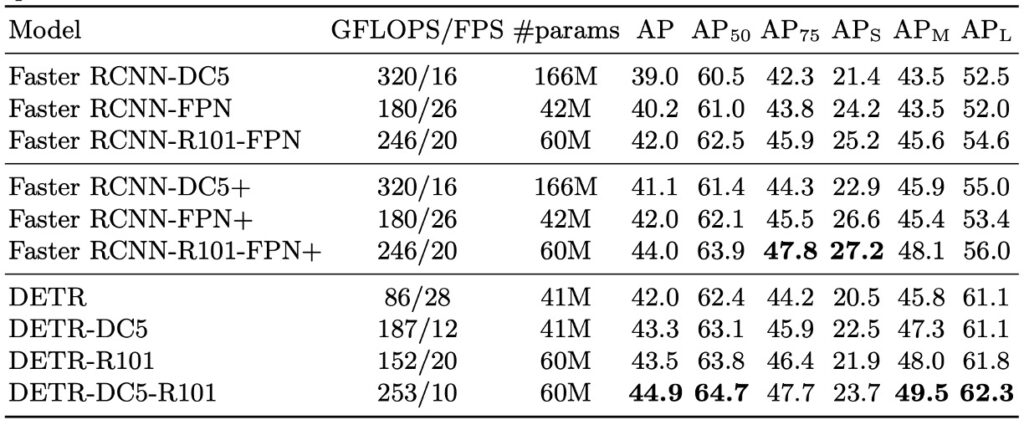
- 總體表現:DETR 在 COCO val 集合上達到 42 AP,與調整後的 Faster R-CNN 不相上下。
- 大物件表現():DETR 明顯優勢(+7.8),這也是其總體表現能追上的主因。
- 小物件表現():DETR 明顯落後(-5.5),成為主要瓶頸。
- 解析度強化版本(DETR-DC5):儘管總體 AP 更高,但在小物件偵測上仍未能超越 Faster R-CNN。
- 不同 backbone 的影響:若使用 ResNet-101 作為 backbone,兩種模型的趨勢仍大致一致,顯示這種比較具備跨架構的一致性。
整體來看,DETR 在長訓練與高解析設定下,的確能在參數數量相近的條件下與 Faster R-CNN 一較高下。
但其對小物件的辨識仍受限於全圖注意力的解析度瓶頸,這也為後續架構(如 Deformable DETR)留下了優化空間。
模型組件分析
作者詳細地探討了 DETR 架構中各個組件的重要性:
-
編碼器層數的影響
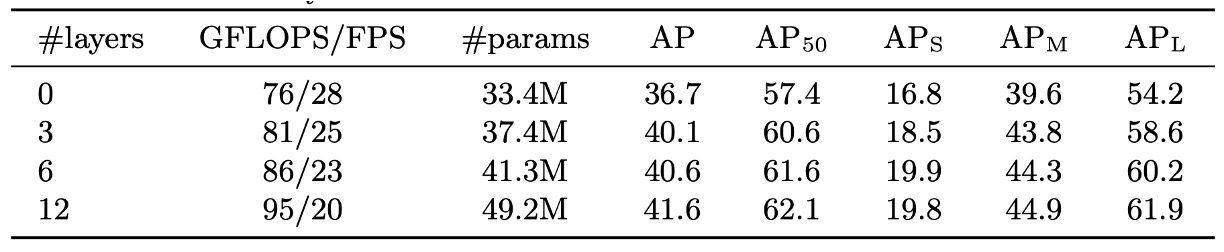
若將 encoder 拿掉,模型將失去影像層級的 global self-attention,整體 AP 下滑 3.9 點,對大物件(APL)影響最劇烈,損失達 6.0 AP。
這暗示 encoder 的角色並非只是過濾特徵,而是負責以全局語意切分場景中可能的物件。作者進一步視覺化了最後一層 encoder 的注意力權重圖如下,可見 encoder 已有能力初步區隔實例,這對 decoder 後續的辨識與定位有關鍵幫助。
-
解碼器層數與 NMS 的關係
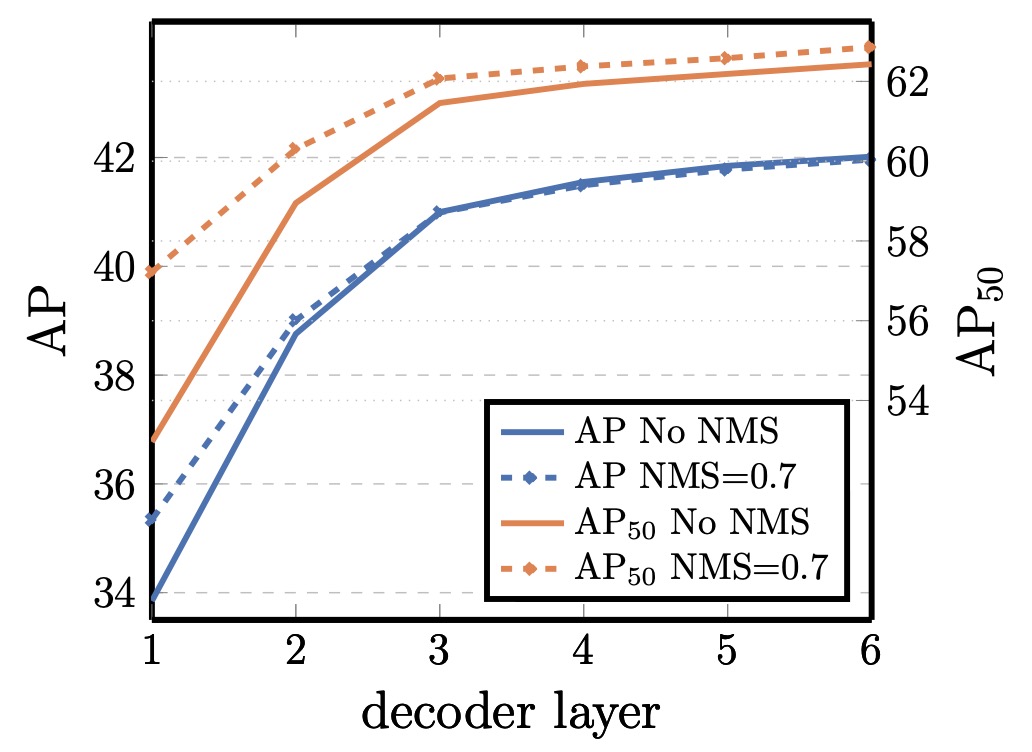
DETR 解碼器具備逐層輔助 supervision 設計,每一層都被訓練為可獨立產生物件預測。實驗顯示,AP 隨著層數遞增而穩定上升,第一層與最後一層之間相差可達 +8.2(AP)/+9.5()。
然而,初始幾層因為缺乏上下文交互,會出現重複預測的情況。若在第一層之後施加傳統的 NMS,可以明顯改善這種重複預測。但隨著層數加深,模型已能自行抑制重複物件,NMS 的效益逐漸消失,甚至在最終層還可能錯刪 true positive 而損失 AP。
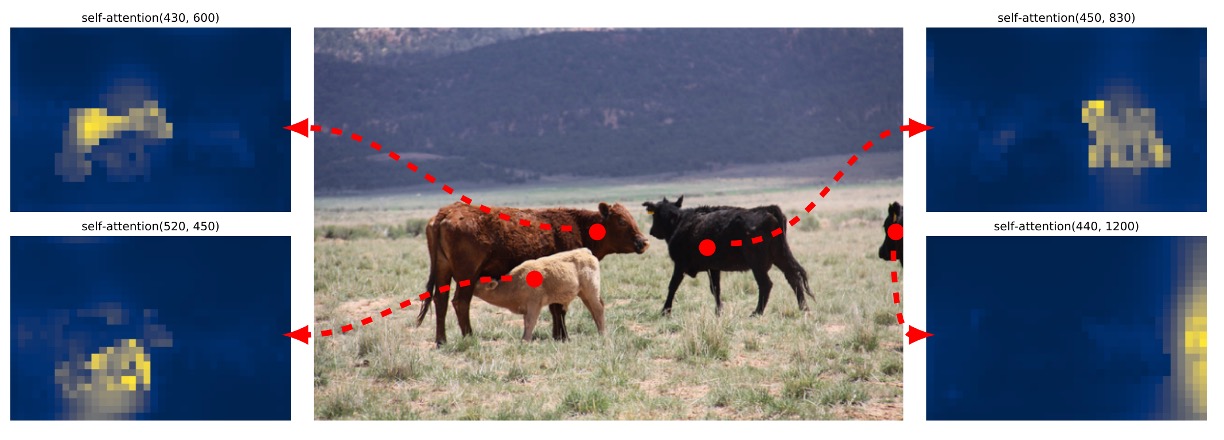
從注意力視覺化來看,decoder 的 attention 相對局部,常聚焦在物件的 extremities(如頭部、腳部)。這與 encoder 先行做出全局實例分離的觀察一致,表示 decoder 更像是在具體輪廓上細化分類與定位。
-
FFN 在 Transformer 中的角色
每層 Transformer block 中的前饋網路(FFN)可視為 channel-wise 的 1×1 卷積。若將其整體移除,只保留 attention 機制,transformer 區塊的參數量從 17.8M 減至 4.8M,整體模型從 41.3M 降到 28.7M。
然而,這樣會導致 AP 下滑 2.3 點,顯示 FFN 雖然結構簡單,卻對模型學習語意分離與特徵轉換仍有實質貢獻。
-
位置編碼的設計與替代實驗
DETR 採用兩種位置編碼機制:
- 空間位置編碼(spatial positional encoding):輸入影像的位置信息。
- 輸出位置編碼(output positional encoding):object query 的嵌入向量。
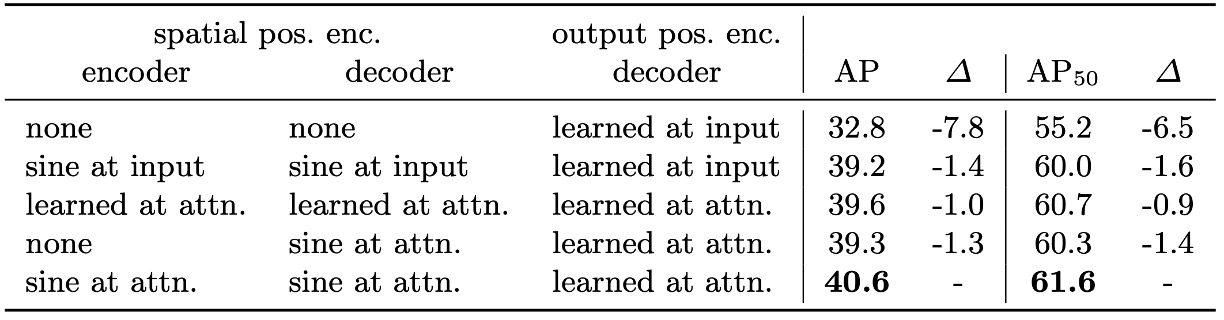
輸出編碼為必要條件,無法移除;空間編碼則進行了數種替代試驗:
- 完全移除空間位置編碼:AP 下降 7.8,模型仍能達到 32+,顯示其具備一定容錯性。
- 採用正弦位置編碼(sinusoidal)或學習型編碼並注入 attention 層:與 baseline 相比,AP 僅微幅下降 1.3 ~ 1.4。
- 只在 encoder 中省略空間編碼:AP 損失僅 1.3,顯示 positional encoding 的關鍵性主要發揮在 decoder 中。
這些結果顯示,儘管 transformer 天生與序列結構相容,但在圖像任務中,明確的空間提示對物件位置與邊界的學習仍然不可或缺。
-
損失函數的貢獻拆解

DETR 的訓練損失由三部分構成:
- 類別分類損失(classification loss)
- 邊界框距離損失(L1 loss)
- 廣義 IoU 損失(GIoU loss)
分類損失為必要條件,無法關閉。作者進一步測試「關閉 L1」、「關閉 GIoU」的情況。結果顯示:
- 單用 GIoU 仍可達合理精度,反映其對框定位貢獻較大;
- 單用 L1 效果明顯下降;
綜合兩者的設計仍是最穩定配置。
這也驗證了 DETR 損失設計的一個核心理念:與其設計複雜的後處理流程,不如在 cost 計算與 loss 回傳階段就納入空間與語意雙重衡量。
模型行為分析
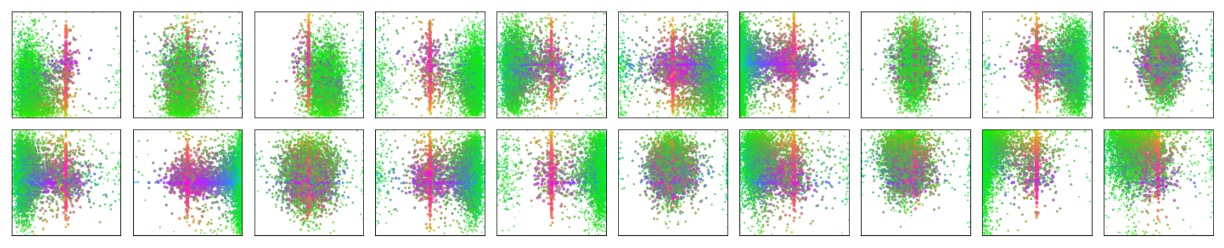
在上圖中,作者視覺化了 COCO 2017 驗證集上所有影像的預測結果,隨機取樣其中 20 個 object query slot,統計它們所預測的所有框的位置與尺寸分布。
每個預測框以其中心座標在 [0, 1] × [0, 1] 的空間中表示,並依框形狀進行色彩編碼:綠色代表小框、紅色代表大型橫向框、藍色代表大型直向框。
結果顯示,每個 slot 並非毫無區別地分工,而是自然發展出數種偏好模式:
- 有些 slot 專注於畫面特定區域(如左上角、中央),
- 有些則傾向預測特定尺度或形狀的框,
- 幾乎所有 slot 都具備一個「預測整張影像大小框」的模式,這類大框常見於 COCO 資料集中具主體性的物件(如大車輛、建築物等)。
這種空間與尺度上的分工並非透過明確監督給定,而是透過 set matching loss 中的學習動力自然產生,代表 DETR 在內部已學會某種「基於 query 分工的隱性結構化預測策略」。
它不靠 anchor 或 region proposal,就能讓每個 query slot 分別「關注」特定的場景區域或物件尺度,這是 set-based 方法一個獨特的行為。
對未見過物件數量的泛化能力
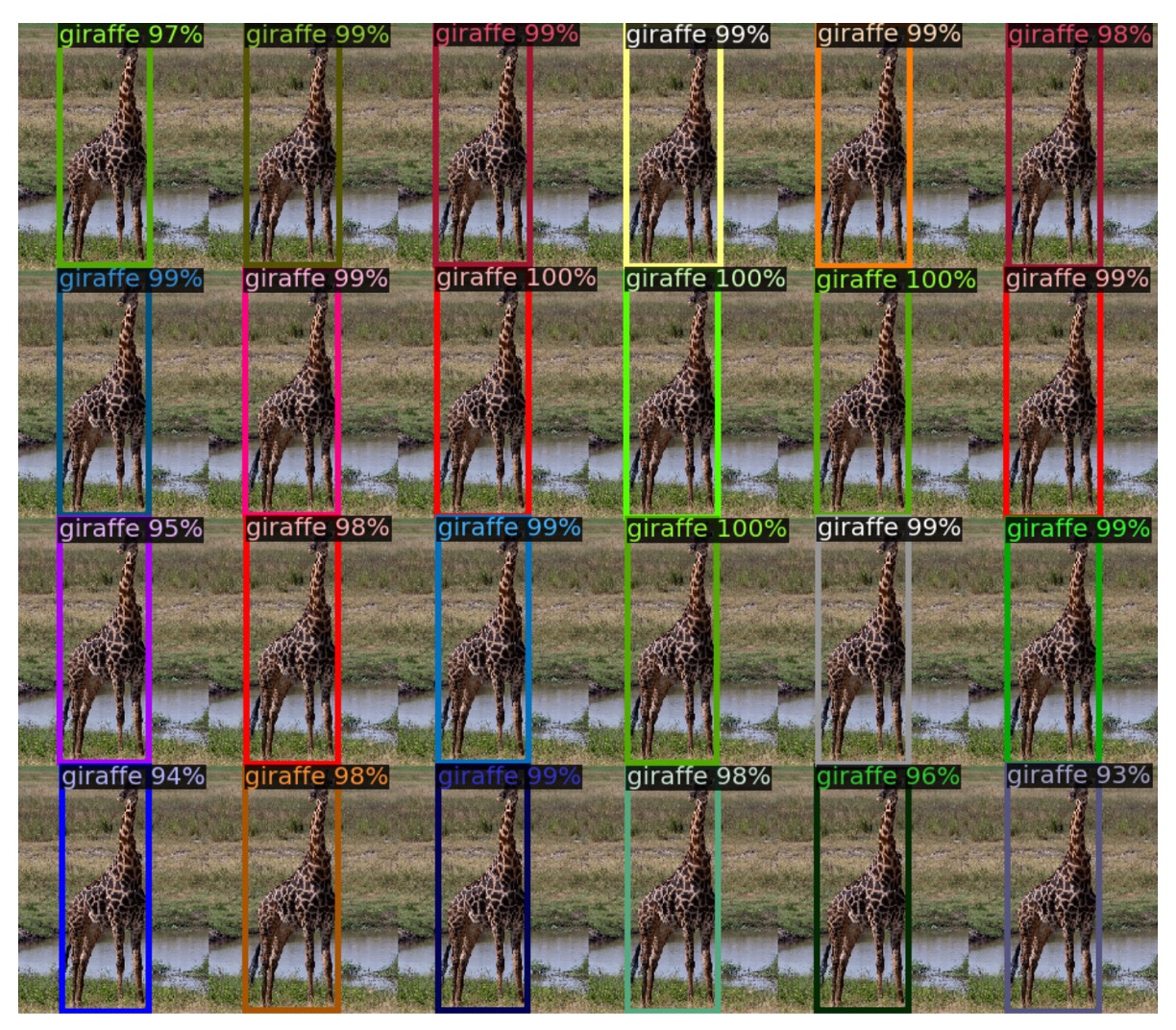
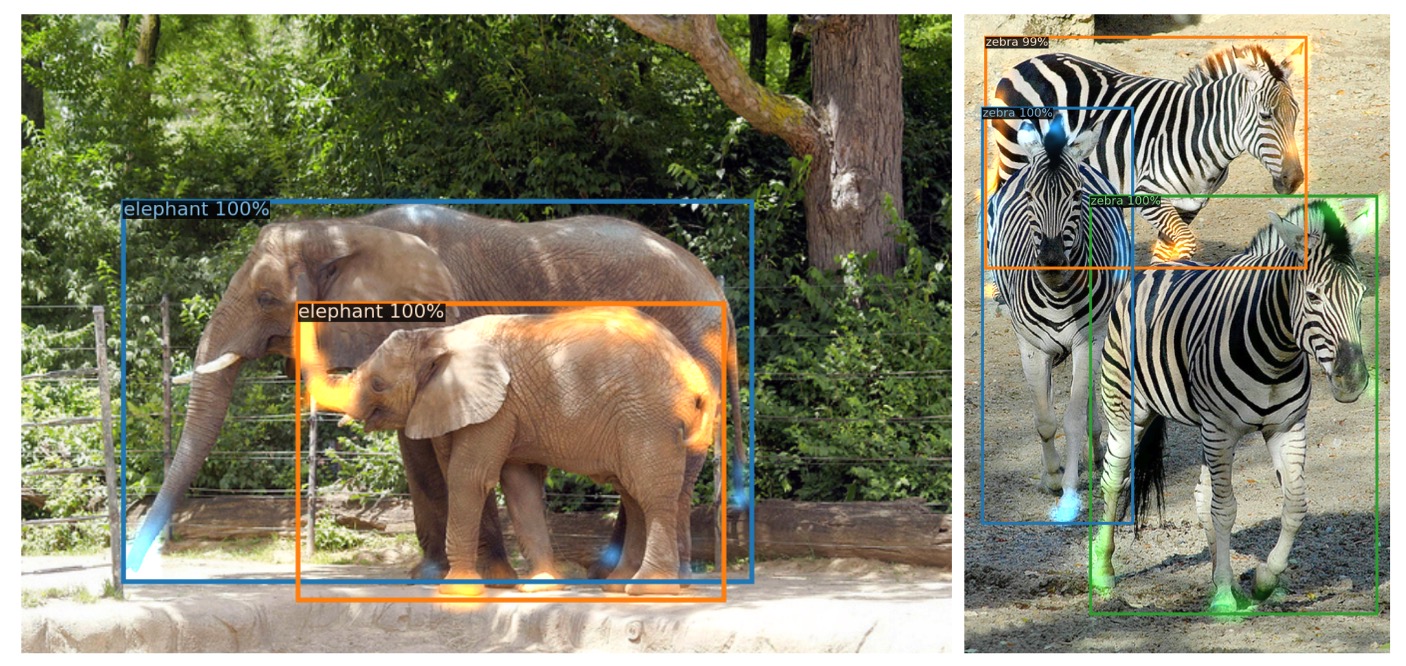
COCO 中大多數圖像的同類物件數量相對有限,例如訓練集中從未出現過超過 13 隻長頸鹿同時出現的情境。為了測試 DETR 是否對這類極端條件能保持泛化能力,作者建構了一張合成圖像,放置了 24 隻長頸鹿。
結果顯示,DETR 成功辨識出了所有 24 隻實例,這是一個明確的 out-of-distribution 測試案例,顯示:
- DETR 的 object query 並未針對特定類別硬編碼;
- 模型整體運作方式並不是「將類別與插槽綁定」,而是以圖像為整體依據進行 query-to-object 的自由分配。
這也呼應先前的設計哲學:object query 作為集合預測中的空白插槽,其學習行為完全由 loss 匹配與 attention 導引而來,並非從一開始就具備語意分工。即便如此,模型最終仍能自發學出有效且可擴展的物件分離能力。
結論
沒有任何技術是完美的。
DETR 在小物件偵測上的確存在明顯瓶頸,這點從實驗數據與可視化分析中皆可確認。即便經過長時間訓練與解析度提升,其在 指標上仍落後於傳統方法。與已發展多年、工程優化成熟的 Faster R-CNN 相比,DETR 在部分場景下僅能達到相當水準,這也提醒我們,它目前尚非在所有任務中的萬用解法。
但 DETR 的價值不是在於「表現超越」,而在於它所開啟的思路與架構可能性。
這是第一個真正意義上將 Transformer 架構應用於物件偵測的工作,並且用集合預測與匈牙利匹配取代了 anchor、proposal、NMS 等傳統偵測流程中長久以來的工程依賴。這種極度簡化的端到端設計,將原本繁瑣的流程壓縮為一個純粹的序列輸入與集合輸出轉換,其概念上的清晰與實作上的整潔,使其具備高度的可延展性與理論吸引力。
基於這個架構的後續論文至少可以找出一百篇,這絕對是值得多讀幾次的經典論文。