[22.03] OC-SORT

掙脫卡曼的囚籠
Observation-Centric SORT: Rethinking SORT for Robust Multi-Object Tracking
之前物件追蹤的部分我們學得比較少,這次我們從 CVPR 的論文來切入這個領域。
這篇筆記我們會寫得比較詳細一點,先把之前不熟悉的指標和方法補起來。
定義問題
在多目標追蹤(Multi-Object Tracking, MOT)這個領域裡,任務看似簡單:
- 在每一幀影像中找到所有物體,並讓它們在時間軸上保持一致的 ID。
然而,這個「讓它是同一個」的問題,往往比「找到它」更困難。
現代 MOT 幾乎都建立在 Tracking-by-Detection 的框架之上:
也就是:先偵測,再追蹤。
我們通常會先有一個「偵測模型(Detection)」,然後用一個「追蹤模型(Tracking)」來串聯這些偵測結果,形成軌跡(Trajectory)。
其中最具代表性的系統,就是 SORT(Simple Online and Real-time Tracking)。
它以 Kalman Filter 為基礎,假設物體在短時間內的速度近似恆定,並以線性運動模型預測未來位置。
這個假設讓 SORT 既簡潔又高效,成為「即時追蹤」的象徵:它能在毫秒內完成預測,卻仍維持穩定的結果。然而,這個優雅的假設,其前提也同樣無比地脆弱:
物體的運動必須是線性的。
任何一個用過的人都知道這個假設到底有多不真實。
我們可以發現被偵測的人會停下腳步、車會轉彎、鏡頭會抖動,而遮蔽(occlusion)幾乎無所不在。當物體被遮擋、再出現時,Kalman Filter 的預測早已偏離真實軌跡。
預測誤差在時間中累積,最終導致追蹤「斷線」與 ID「重置」。
當軌跡不再連貫,MOT 的任務也就宣告失敗。
你可能會考慮引入更高的「幀率(frame rate)」來緩解這個問題。
但是實際的情況卻更加吊詭:「高幀率」並沒有緩解問題,反而加劇了它。
理論上,幀率越高,線性假設越合理;但實際上,兩幀之間的位移微小到與雜訊同級,Kalman Filter 估出的速度因而劇烈抖動,噪聲被不斷放大、疊加,最終將整條軌跡推離真實位置。
同時,另一個更根本的矛盾也逐漸浮現:
現代的偵測器往往比追蹤器的「估計模型」更準確。
在 SORT 的架構裡,觀測只是用來輔助更新估計的資訊;真正決定軌跡延伸的,仍是「模型預測」本身。意思就是,哪怕 Detection 模型已經明確地告訴你「物體」已經到某個位置了,但 Tracking 模型仍然會依照自己的估計,將軌跡延伸到另一個位置。
這簡直是本末倒置!
因此,本篇論文的作者從這個矛盾出發,重新思考「觀測」與「估計」的關係,試圖讓軌跡的延伸重新回到觀測本身的核心地位。
這到底會不會是一個好主意呢?
重新審視 SORT 的侷限
在談 OC-SORT 之前,我們得先回到它的起點:卡曼濾波(Kalman Filter)。
這個經典演算法是所有線性追蹤模型的核心,SORT 正是建立在它之上。
Kalman Filter(KF)是一種線性狀態估計器。
它假設目標的運動符合離散時間的線性動態系統,並在每一個時間步中交替進行兩個階段:分別是「預測(predict)」與「更新(update)」。以先驗(predict)預測狀態,再用後驗(update)修正偏差。在沒有觀測的情況下,它依然能繼續「預測未來」,這也是它在追蹤問題中如此受歡迎的原因。
SORT 將 Kalman Filter 應用於視覺追蹤。
它定義的狀態向量為:
其中:
- :物體中心在影像中的座標
- :bounding box 的面積
- :bounding box 的長寬比(假設為常數)
- :對應的速度項
偵測器提供觀測向量:
即中心點、寬高與置信度。
SORT 假設物體在短時間內遵循線性運動模型:
在固定幀率下(),每個 frame 間的位移可以被視為線性近似。
高幀率時,這個假設通常足夠好,因為物體在連續幀之間的移動量很小,即使舞者旋轉、拳擊手揮拳,也能在局部時間內被「近似為線性」。
然而,當物體被遮擋(occlusion)時,偵測器無法提供觀測值,Kalman Filter 只能進行「虛擬更新」:
這意味著系統會「盲信」自己的預測,即使它沒有任何新的觀測依據。
這種依賴估計而非觀測的設計,正是 SORT 的根本侷限。
SORT 的侷限還遠不止這樣,以下是三個主要的問題:
-
對狀態雜訊過於敏感
假設物體中心位置的估計服從高斯分布:
那麼根據線性運動模型:
可得速度的噪聲分布:
也就是說,幀率越高( 越小),速度估計的雜訊越大。
對 MOT17 資料集而言,每幀平均位移僅約 1–2 像素,這意味著只要位置誤差有 1 像素,估出的速度就可能完全錯亂。雖然單幀的偏差看似微小,但在連續時間中,它會被重複放大與累積。
-
誤差的時間放大效應
當遮蔽發生時,Kalman Filter 無法獲得新的觀測。它只能依靠過去的估計持續外推。
假設在 幀內無觀測,則:
這時位置誤差會成平方級增長:
假設位置方差僅 1 pixel,連續 10 幀遮蔽就足以讓軌跡偏移超過整個行人身高(數百像素)。
當場景擁擠時,這樣的錯位幾乎等於追蹤失效。
-
估計導向的設計缺陷
前述兩個問題,其根源都來自 SORT 的哲學:它是估計為中心而設計的算法。
它允許在沒有觀測時持續更新;它信任模型預測多於真實偵測;它假設過去的估計誤差不會災難性地累積。然而在現代環境中,這些假設都不再合理。
現代偵測器的觀測噪聲,往往遠小於 Kalman Filter 的預測噪聲。
也就是說,「觀測」比「估計」更可靠。
當 SORT 遇上非線性運動與遮蔽,它的估計反而成為最大的誤差來源。
解決問題
作者提出的核心思想很簡單:
既然 觀測比估計更可靠,那麼就讓追蹤以「觀測為中心(observation-centric)」來構築,而不是以「估計」為核心。也因此,這個方法就被命名為 OC-SORT(Observation-Centric SORT)。
這裡有兩個關鍵設計:
- Observation-centric Re-Update (ORU):用觀測來修正遮蔽期間累積的誤差。
- Observation-Centric Momentum (OCM):在關聯階段引入「方向一致性」,但這次不再依賴估計,而是依賴真實的觀測。
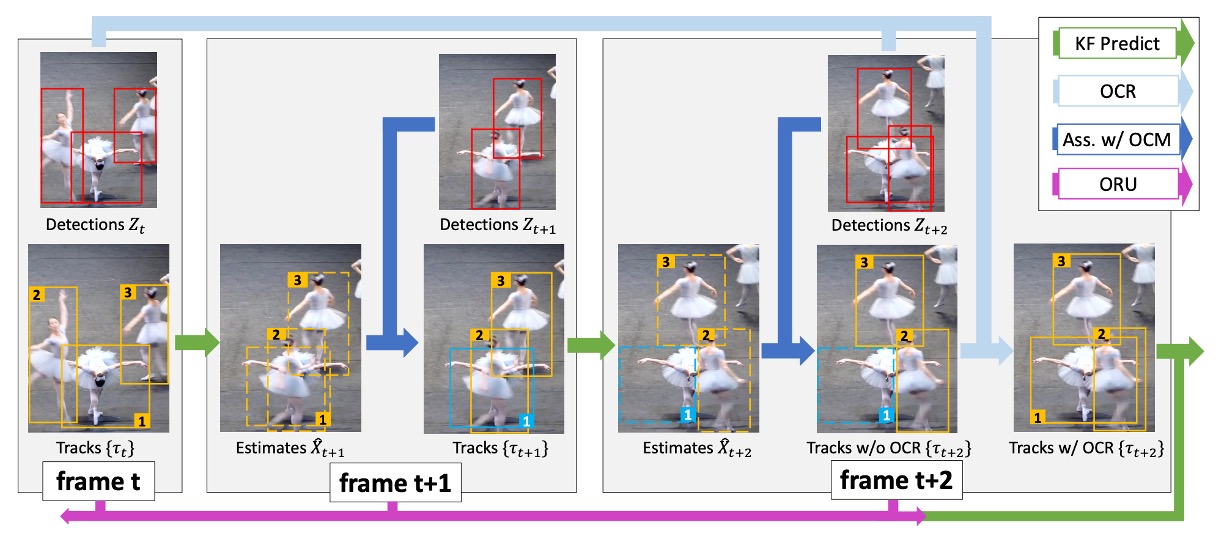
整體流程如上圖所示。
- 紅色框是偵測器輸出的觀測結果
- 橘色框是活躍的追蹤軌跡
- 藍色框是失去追蹤的目標。
- 虛線框代表 Kalman Filter 的預測。
當目標 #1 在 幀因為遮蔽而消失,SORT 會讓它漂移;但在 幀重新出現時,OC-SORT 會觸發 ORU,把這段遮蔽期間「倒帶」重算,避免累積誤差。
Observation-Centric Re-Update (ORU)
在傳統 SORT 中,即使一個目標在 幀被重新找回,Kalman Filter 的參數也早已嚴重漂移。
這表示著它很快會再次丟失。
ORU 的解法是:當一個目標重新被偵測到(re-activation)時,不是直接接上原本漂移的狀態,而是使用「虛擬軌跡(virtual trajectory)」來回溯修正。
數學上,假設最後一次被看見的觀測是 ,而在 再次出現時有觀測 ,那麼在遮蔽區間 ,我們生成一條插值軌跡:
接著,Kalman Filter 會在這些虛擬觀測上重新執行「預測-更新」迴圈:
這樣做的效果如下圖所示:
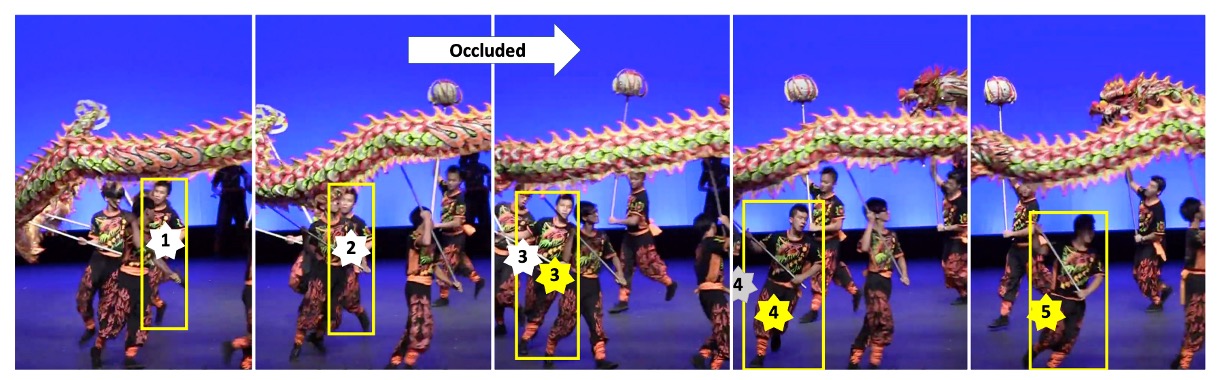
當舞龍表演的演員在第二幀被遮擋,到第三幀重新出現時,若不使用 ORU,Kalman Filter 的估計中心(白色星號)會偏移嚴重,導致錯失關聯;而 ORU 用虛擬觀測修正後,新的估計中心(黃色星號)能與偵測框重新對齊,追蹤得以延續。
Observation-Centric Momentum (OCM)
除了修正累積誤差,作者還希望在關聯階段更穩健。
在理想情況下,物體運動方向應當具有一致性:一個人往左跑,不應突然被配對成往右的偵測框。
問題是,如果依賴 Kalman Filter 的估計來算方向,會受到嚴重噪聲影響。因此,OCM 提出一個觀測導向的設計:用真實偵測的觀測點計算方向,再將方向一致性引入關聯成本矩陣。
數學上,關聯成本被定義為:
- :IoU-based 成本
- :方向一致性成本
- :權重超參數
其中 衡量兩個角度差異:
- :由既有軌跡上兩個觀測點形成的方向
- :由軌跡最後一個觀測點到新偵測框的方向
方向差異為:
角度 的計算公式為:
詳細的概念示意,如下圖所示:
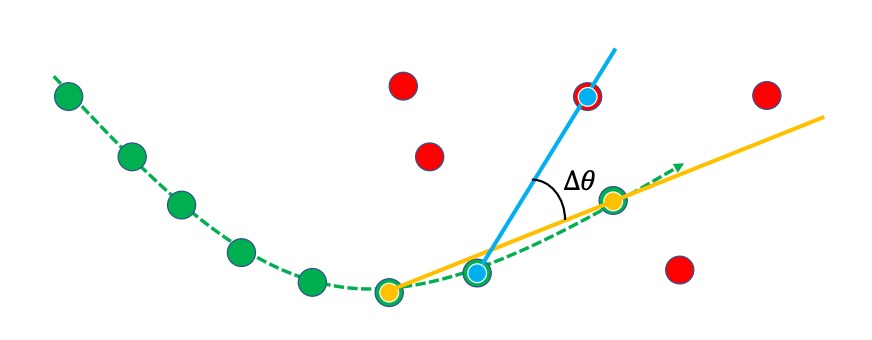
綠線是既有軌跡,紅點是新的偵測,藍色連線是 ,黃色連線是 。
若兩者方向一致( 小),則關聯成本較低,更可能配對成功。
Observation-Centric Recovery (OCR)
除了 ORU 與 OCM,作者還提出一個經驗上的小技巧:OCR。
當一個追蹤在正常關聯階段沒有找到匹配,OCR 會嘗試用最後一次的觀測再與新的偵測進行「第二次關聯」。
這在處理短暫遮蔽或靜止物體時特別有效。
討論
為了全面驗證 OC-SORT 的穩健性,作者在多個多目標追蹤資料集上進行評估:
-
MOT17
-
任務:針對城市場景中的行人進行追蹤。
-
資料特徵:
- 包含 7 段影片,同一段影片提供來自不同檢測器的標註(DPM、Faster R-CNN、SDP),因此常用於比較不同偵測輸入下的追蹤表現。
- 幀率通常在 30 FPS 左右,時間間隔較短,因此物體運動大多近似線性。
- 場景雖然有遮蔽,但複雜程度屬於中等。
-
挑戰性:
- 行人之間會互相靠近或交錯,但大部分情況下,Kalman Filter 的線性假設仍相當合理。
- 適合用來測試「基本 MOT 系統」的追蹤效能。
-
-
MOT20
-
任務:同樣是行人追蹤,但場景更加極端。
-
資料特徵:
- 收錄於 2020 年,專為挑戰「高密度人群 (crowded scenes)」而設計。
- 行人數量極高,每張影像可能同時標註超過 100 個行人。
- 遮蔽 (occlusion) 與重疊 (overlap) 非常嚴重。
-
挑戰性:
- 即使幀率仍偏高,行人之間的互相遮擋會讓「單純的線性運動模型」失效。
- SORT、DeepSORT 這類基於 Kalman Filter 的方法,往往在這裡出現大量 ID switch。
- 更適合作為「遮蔽下的極限壓力測試」。
-
-
KITTI
-
任務:行人與汽車追蹤
-
特徵:
- 採用車載視角,主要場景是街道與交通環境
- 幀率僅 10 FPS,時間間隔大 → 線性假設容易失效
- 因此,非線性運動更明顯(例如行人突然橫穿馬路、車輛轉彎或加速)
-
挑戰性:
- 預測需要涵蓋更長的時間間隔
- 傳統 Kalman Filter 在這種低幀率環境中更容易累積誤差
-
-
DanceTrack
-
任務:舞蹈場景中的人類追蹤
-
特徵:
- 偵測本身容易,bounding box 定位準確
- 運動高度非線性:旋轉、交叉、換位頻繁
- 行人之間外觀高度相似(穿著一致),單靠外觀難以區分
- 遮蔽嚴重,身份交錯頻繁發生
-
挑戰性:
- 強調「關聯正確性」而非單純的檢測
- 特別考驗追蹤器是否能在非線性運動與高頻遮蔽下保持 ID 穩定
提示本文特別強調這個資料集,因為它正好符合「非線性運動 + 遮蔽」的挑戰場景
-
-
CroHD
-
任務:人群中的頭部追蹤
-
特徵:
- 極度擁擠的人群場景
- 標註對象不是整個行人,而是「頭部」,更強調在高密度場景下的分辨能力
-
挑戰性:
- 遮蔽與重疊程度極高
- 適合用來測試追蹤器在「超擁擠場景」中的極限表現
-
在本篇論文中,該資料集結果僅放於附錄,作為額外驗證:
-
從這些資料集的設計可以看到,作者刻意選擇了不同場景:MOT 與 KITTI 偏線性,DanceTrack 則幾乎是「非線性運動的極端測試場」。
為了公平比較,OC-SORT 並沒有重新訓練偵測器,而是直接採用既有 baseline 的公開檢測結果:
- MOT17 / MOT20 / DanceTrack → 使用 ByteTrack 提供的 YOLOX 偵測器權重
- KITTI → 使用 PermaTrack 官方釋出的偵測結果
這樣能確保差異來自追蹤方法,而不是檢測品質。
在 ORU 與 OCM 的細節上,作者做了明確設定:
-
ORU 虛擬軌跡生成
遮蔽期間採用恆定速度假設,即:
(公式的具體形式,實際上就是線性插值)
-
OCM 運動方向估計
- 使用相隔 三幀(Δt = 3) 的觀測點計算方向
- 測量方式:兩條方向角的絕對差值(弧度制)
- 權重 設為 0.2
-
其他設定
- 檢測門檻:MOT20 → 0.4,其餘資料集 → 0.6
- 關聯 IoU 門檻:0.3
追蹤的評估指標並不只有傳統的 MOTA。
本文更強調能反映「關聯品質」的指標:
-
HOTA
- 主指標,兼顧「檢測準確度」與「關聯準確度」
-
AssA
- 專門評估 association performance(即「是否能持續跟對同一個目標」)
-
IDF1
- 衡量 ID 一致性的指標,也屬於關聯類
其他指標如 MOTA 也有報告,但作者指出:
由於 MOTA 與檢測表現高度相關,只有在「所有方法使用相同檢測結果」時才公平比較。因此,本文將這種情境稱為 public tracking,並在論文附錄 C 詳細列出。
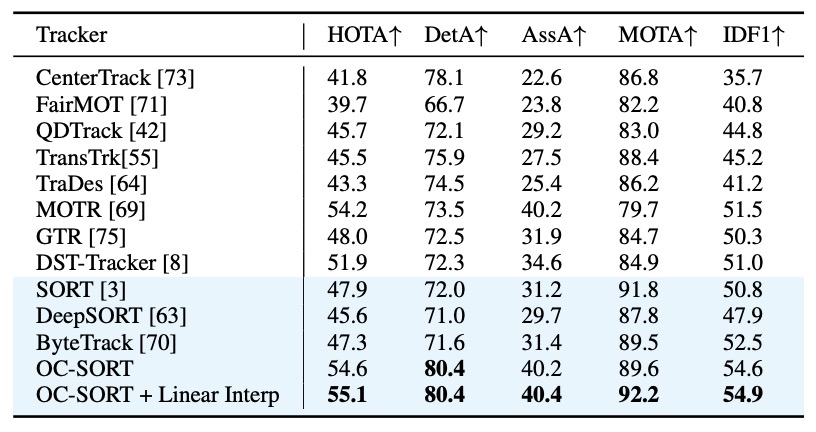
MOT17 結果
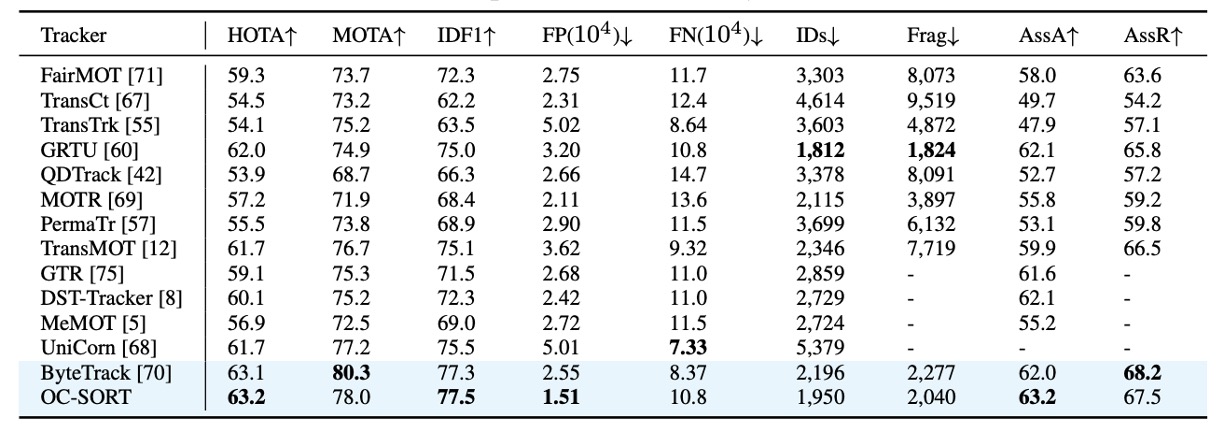
在 MOT17 上,OC-SORT 與現有最先進方法保持相當水準。
由於 MOT17 的場景多為 線性或近線性的行人運動,原本 SORT 的設計在這裡已經相對穩定,因此 OC-SORT 的優勢並不特別顯著。但即便如此,OC-SORT 在 關聯準確度(AssA, IDF1) 上仍展現出持續改善。
需要注意的是:為了公平比較,作者直接採用了 ByteTrack 的 YOLOX 偵測結果。OC-SORT 沒有像 ByteTrack 那樣動態調整 detection threshold,也沒有引入額外的低置信度檢測來提升 MOTA。儘管如此,OC-SORT 依然能在 HOTA 與 IDF1 等衡量「關聯正確性」的指標上保持優勢。
這證明了即使在「線性運動 + 遮蔽不嚴重」的場景中,觀測導向的設計仍能提供更穩定的軌跡延續。
MOT20 結果

相比 MOT17,MOT20 更加擁擠,遮蔽頻繁,正好是 SORT 的弱點。
在這個挑戰性場景中,OC-SORT 展現了明顯優勢:
- 在 HOTA 指標上達到 62.1,刷新了當時的 SOTA。
- 在行人嚴重互相遮擋時,傳統 SORT 會因為誤差累積導致大量 ID switch;而 OC-SORT 的 ORU 機制能有效「修補遮蔽期間的錯誤」,維持 ID 的連續性。
雖然 OC-SORT 仍保持簡單設計(未使用 ByteTrack 那樣的 adaptive threshold 或多檢測融合),但它在極端人群場景下依然穩定超越其他方法,說明「觀測導向」的設計特別適合高遮蔽環境。
DanceTrack 結果
DanceTrack 是 OC-SORT 的核心驗證資料集。
在這個資料集中:
- 偵測容易,但運動高度非線性(旋轉、交叉、換位頻繁)。
- 參與者外觀高度相似,靠外觀無法有效區分。
- 遮蔽與 ID 交錯幾乎是常態。
結果顯示 OC-SORT 大幅度超越基準方法,在 HOTA 與 IDF1 上均創下新高。當舞者彼此交錯時,傳統 SORT 容易 ID 斷裂或重置,而 OC-SORT 依靠 ORU 與 OCM 保持了穩定的軌跡。
這證明了在「非線性運動 + 遮蔽」場景下,OC-SORT 的觀測導向設計確實有效。
KITTI 結果

KITTI 的挑戰來自於低幀率(10 FPS):
對行人追蹤來說,OC-SORT 在這裡達到了新的 SOTA,明顯超越 PermaTrack,同時速度提升近 10 倍。這代表在「低幀率 + 行人運動」的環境中,OC-SORT 的 ORU 能有效補足遮蔽期間的誤差,維持連續性。
然而,對於 汽車追蹤,結果顯示出 OC-SORT 的一個限制:
- 由於汽車速度較快,在低幀率下,連續兩幀的 bounding box IoU 幾乎為零。
OC-SORT 的預設版本仍依賴 IoU 做關聯,導致車輛追蹤表現不理想。這並非 OC-SORT 設計的內在缺陷,而是 IoU 關聯方法在高速運動下的普遍問題。
解法可能可以考慮融合其他關聯線索,或引入外觀相似度(如 DeepSORT 使用的 ReID 特徵)。
模組貢獻分析
作者首先在 MOT17 與 DanceTrack 的驗證集上,分別關閉/開啟各模組進行測試,結果如下表:
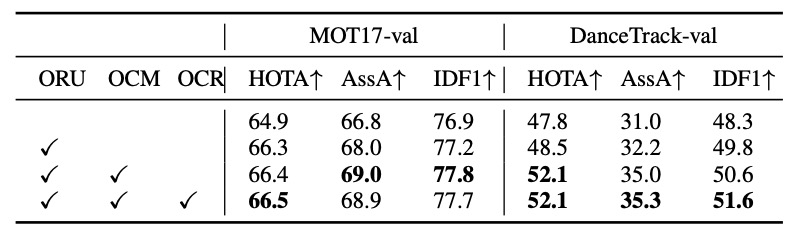
整體趨勢十分明確:
-
ORU 的貢獻最為顯著。
在兩個資料集上皆帶來明顯的 HOTA 與 IDF1 提升。這代表當追蹤軌跡在遮蔽後重新出現時,利用虛擬觀測修正過往誤差確實能顯著提升穩定性。
-
OCM 的效果具場景依賴性。
- 在 DanceTrack 上(非線性運動 + 遮蔽頻繁),OCM 顯著提升關聯表現。
- 在 MOT17 上則相對有限,因為大部分行人運動軌跡近似線性,方向一致性並非主要問題。
結果顯示 ORU 提供「遮蔽期間的修復能力」,而 OCM 提供「非線性運動的穩定關聯」,兩者組合讓 OC-SORT 在各種動態場景下都能保持穩健。
ORU 的虛擬軌跡生成方式
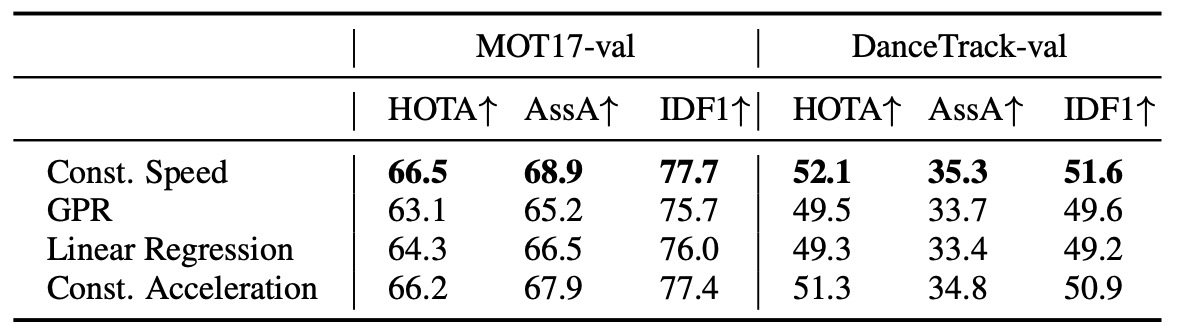
在 ORU 中,OC-SORT 必須為「被遮蔽的一段時間」生成虛擬觀測點。
作者測試了多種軌跡生成假設,包括:
- Constant Speed(恆定速度) ← 論文採用
- Constant Acceleration(恆定加速度)
- Linear Regression(線性回歸)
- Gaussian Process Regression(GPR, 使用 RBF kernel)
- Near Constant Acceleration Model(NCAM)
實驗結果如上表,局部假設(Local Hypotheses)表現遠優於全域回歸(Global Regression)。
原因在於 ORU 是在「線上追蹤」過程中即時運行的,在遮蔽期間可用的歷史資料點往往非常有限(可能僅幾幀)。因此,嘗試用線性回歸或 GPR 這類全域方法去擬合軌跡,反而容易過擬合或不穩定。
最終,Constant Speed 模型以最簡單的假設取得最佳穩定性與即時性。
OCM 的 Δt 選擇
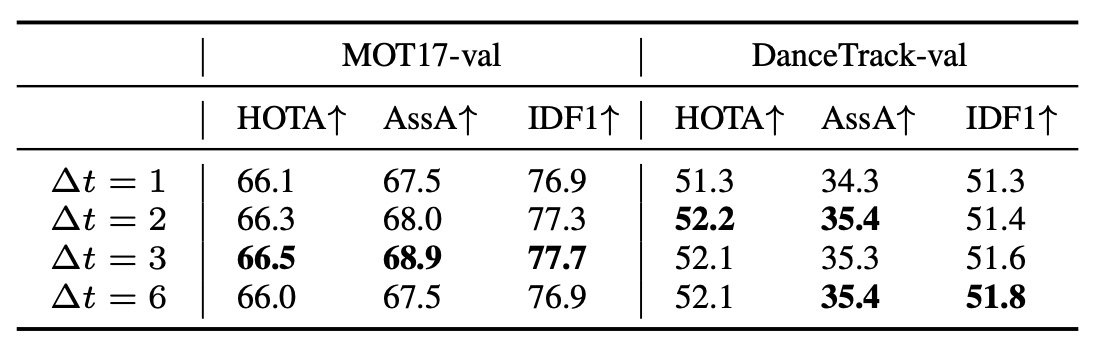
OCM 的關鍵在於計算運動方向(momentum consistency),而這需要兩個不同時間點的觀測。
問題是:時間間隔 Δt 應該多大?
- Δt 太小 → 雜訊大(速度估計極度敏感)
- Δt 太大 → 線性假設失效(物體已經改變方向)
為了找到平衡,作者在比較了不同 Δt 的結果。
結果如上表:
- 從 Δt = 1 增加到 Δt = 3 時,性能明顯提升。
- 但當 Δt 過大(例如 Δt = 5)時,性能開始下降。
這印證了理論分析: 在有限時間間隔內取觀測,可同時抑制速度噪聲又維持線性近似。
最終實驗中,作者固定使用 Δt = 3 作為 OCM 的預設值。
結論
OC-SORT 從 SORT 的核心假設出發,指出傳統 Kalman Filter 在遮蔽與非線性運動下會因缺乏觀測而產生誤差累積。為此,它以「觀測為中心」重新設計追蹤流程:透過 ORU 修正遮蔽期間的偏移,並以 OCM 強化運動方向的一致性。這使 OC-SORT 在保持簡潔與即時性的同時,大幅提升於嚴重遮蔽與複雜運動場景下的穩定性。
對應用而言,本論文帶來的啟發在於:
當偵測器已足夠可靠時,追蹤的核心不在於更複雜的預測模型,而在於如何更有效地運用觀測。
最後,雖然 OC-SORT 在多個資料集上展現出色表現,仍受限於低幀率或高速運動場景中 IoU 匹配的不穩定性。然而,作為一個模組化、即時且穩健的基線系統,OC-SORT 重新定義了「輕量追蹤器」的可能邊界。