[21.11] S4

曼巴的序曲
Efficiently Modeling Long Sequences with Structured State Spaces
我們想要看個 Mamba,但發現有許多前置任務需要完成,需要補足一些基礎知識。
因此,我們先從 S4 開始。
這篇論文主要為了改進現有的狀態空間模型(State Space Model, SSM)的問題。
說到 SSM,這表示我們又得繼續往前補充 SSM 的相關知識。
怎麼看個論文像是在玩解謎遊戲?
狀態空間模型
作者也知道讀者們不熟,因此在論文中提供了一些基礎知識,我們一起來看看。
狀態空間模型(State Space Model,簡稱 SSM)是一種數學工具,用於描述動態系統的行為。它廣泛應用於控制工程、信號處理、經濟學和近年來的深度學習領域。
SSM 的核心思想是通過內部的「狀態」來描述系統的動態行為。它將外部輸入信號映射到系統的內部狀態,進而生成輸出信號。這種框架能夠捕捉系統隨時間的演化,特別適合處理時間序列數據和動態過程。
SSM 通過兩個核心方程描述系統的行為:
-
狀態方程(State Equation):描述系統狀態隨時間的變化。
- 狀態轉移矩陣 :決定了系統的內在動態,如自然衰減或振盪。
- 輸入矩陣 :決定了輸入如何影響系統狀態。
-
輸出方程(Output Equation):描述如何從狀態獲得輸出。
- 輸出矩陣 :決定了哪些狀態對輸出有影響。
- 直接傳輸矩陣 :描述輸入對輸出的直接影響(若存在)。
因此,在給定初始狀態 和輸入 的情況下,可以解出 和 ,從而描述系統隨時間的演化。
看到這裡,我們覺得這跟 RNN 很像,都是處理時序列,而且都有個隱藏狀態。
HiPPO 理論
在過去的研究中,基礎的 SSM 在實際應用中表現不佳,原因線性一階常微分方程的解呈現指數形式,導致隨著序列長度增加,梯度可能指數性地衰減或增大,影響模型的學習能力。這使得 SSM 難以處理涉及長期記憶的序列任務。
也就是梯度消失或梯度爆炸問題。
為了解決問題,LSSL 模型(Linear State Space Layer)引入了 HiPPO 理論(High-order Polynomial Projection Operators),該理論專注於連續時間記憶的數學框架。
HiPPO 提出了一類特殊的矩陣 ,當這些矩陣用於 SSM 的狀態轉移方程時,可以使狀態 高效地記憶輸入歷史 的信息。
HiPPO 矩陣的數學定義如下:
- :定義了不同階數之間的互動。
- :表示自反性(自身對自己的影響)。
- :則狀態之間無影響。
這種矩陣結構能捕捉輸入歷史在時間上的重要性,並動態地調整記憶的優先級。在 Sequential MNIST 任務中,使用 HiPPO 替換後的模型的準確率從 60% 提升至 98%。這表明 HiPPO 理論能有效地解決長期依賴問題,並提升 SSM 在處理序列數據時的表現。
HiPPO 的直觀理解
HiPPO 矩陣可以被視為一種將歷史訊號壓縮到固定維度的方式,並且在每個時間步上不斷更新這些壓縮信息。例如:
- 高階訊號會受到更多關注(例如,近期的輸入比過去更重要)。
- 低階訊號會逐漸被淡化,但仍保留有意義的記憶,實現了有效的歷史表示。
那跟 RNN 有什麼區別?聽起來很像是 RNN 的隱藏層?
HiPPO 矩陣基於「連續時間的數學框架」來壓縮和更新輸入的歷史訊號。強調對輸入訊號的動態投影和多階結構化記憶,使用正交基來有效表示過去訊號。而 RNN 隱藏狀態基於「離散的非線性更新規則」,通常由神經網路自己完成,使用激活函數(如 或 )來更新隱藏狀態,通過非線性轉換對當前輸入進行編碼。
因此 HiPPO 矩陣「自然地」支持「長期記憶」,尤其是透過正交多項式和特定矩陣設計來保留歷史信息。而 RNN 隱藏狀態則嚴重依賴梯度流,容易受到梯度消失或爆炸的影響,限制了其處理長期依賴的能力。
LSTM 和 GRU 是為了解決此問題而設計的變體,通過門控機制保留長期記憶,但這種方法依然需要手工設計的非線性更新規則,效率仍低於 HiPPO 的數學結構化方式。
離散化
SSM 在處理離散輸入序列 時,需要將連續時間表示的公式離散化,因為輸入 通常是來自連續信號 的離散采樣:
其中 表示時間步長,連續輸入與離散輸入的關係為 ,這表示第 個樣本是連續訊號在時間 的值。
為了實現這一轉換,常用的方法是雙線性法(bilinear method),它將連續狀態矩陣 轉換為離散版本 。
離散化後的狀態空間模型表示為:
其中:
- 是離散狀態矩陣,用於描述隱藏狀態的演變。
- 是離散輸入矩陣,描述輸入如何影響狀態。
- 是輸出矩陣,與連續情況相同。
離散化後的公式轉化為序列到序列的映射,將每個時間步的隱藏狀態 與前一步的狀態 相連,類似於遞迴神經網路(RNN)的結構。
可以看作是 RNN 的隱藏狀態, 為遞迴層的權重矩陣。
這些公式在做什麼?
這些公式的目的是將一個連續時間的系統轉換成離散時間的版本,裡面的元素代表:
- :這個矩陣描述了系統內部狀態如何隨時間變化,就像系統的「自然演變規則」或「內在特性」。你可以理解成沒有外在影響時,系統自己會怎麼改變的規律。
- :這個矩陣說明了「外部輸入」如何影響系統的狀態,類似於系統接收外部資訊的「通道」或「方式」。它告訴我們,當有輸入訊號時,系統的狀態會發生怎樣的改變。
- :這個矩陣將系統的「內部狀態」轉換為「可觀察的輸出」。可以把它看作系統的「顯示器」,透過它,我們能夠看到或測量系統狀態所產生的輸出結果。
- :這是時間間隔,表示我們每隔多長時間對系統進行一次觀察或更新,例如每秒鐘一次。
- :這是單位矩陣,相當於在矩陣運算中「不改變」任何東西,主要用於數學計算的便利。
基於上述元素,我們可以拆解公式:
-
的公式
這個公式的目的是將連續時間的狀態變化規則 轉換為離散時間的版本 ,我們可以這樣理解:
-
:這部分表示我們根據目前狀態,向前預估了一小步,預測系統會如何改變。
-
:這部分對前面的預估進行修正,校正預測中的誤差,確保結果更準確。
總之就是 告訴我們系統狀態如何從前一時刻轉移到下一時刻。
-
-
的公式
這個公式的目的是將輸入矩陣 轉換為離散時間下的版本 ,以描述輸入如何在每個時間步上對系統狀態產生影響。
首先, 表示在時間間隔 內,輸入對系統的直接影響。
然後,使用 對這個影響進行調整,考慮到系統本身的動態特性,使得輸入的影響在離散時間下更加準確。
-
輸出矩陣 保持不變,因為系統輸出的測量方式在離散化過程中不需要調整。
所以我們現學現賣,實際應用一下。
假設你正在開車,汽車的狀態(如速度和位置)會隨時間而改變。
連續時間的公式 描述了汽車在每一刻的動態變化,但我們只能每隔一段時間()進行觀察和控制。
- :描述在離散的時間步長下,汽車的內在變化(如慣性和自然減速)如何從上一時刻的狀態演變到下一時刻。
- :描述駕駛者的操作(如踩油門或煞車,作為輸入)如何在每個時間步對汽車的狀態產生影響。
- :描述我們透過速度計或里程表等儀表讀取到的汽車速度或位置,這部分在離散化過程中保持不變。
卷積表示法
儘管上面的遞迴公式能捕捉序列關係,但每一步的計算需要依賴前一步的結果,導致難以在 GPU 上高效訓練。
所以我們必須將遞迴公式轉換為卷積形式,假設初始狀態 ,遞迴公式逐步展開:
輸出 為:
即:
展開後,我們發現這個部分可以被表示為卷積形式:
其中:
就是我們熟悉的卷積核,其描述了系統的輸出如何由輸入通過狀態矩陣傳遞來生成。
定義問題
我們終於可以回到論文本身了,真不容易。
作者在一開始就明確指出,這篇論文的核心目標是解決序列模型在處理「長距離依賴(Long-Range Dependencies, LRDs)」問題時的效能瓶頸,特別是現有模型在長序列處理上的計算與記憶需求過高的挑戰。
目前大多數的序列模型只能有效處理「幾千個時間步長」,但現實世界的時間序列數據往往需要對「數萬個時間步長」進行推理。例如,Path-X 任務中的序列長度為 16384,現有模型在這樣的長距場景(LRA)基準測試上表現非常差,甚至只能達到隨機猜測的水平。
雖然傳統的模型,像是 CTMs、RNNs、CNNs 和 Transformers,都提出了專門設計的變體以應對 LRD,例如正交 RNNs、擴張卷積、以及高效 Transformers 等,但這些方法仍在困難的基準測試(如 LRA 和原始音頻分類)上表現不佳。
除了學術界主流的技術之外,SSM 雖然有理論上的潛力,但長期以來難以應用於深度學習,原因包括:
- 深層 SSM 雖然理論上能處理 LRD,但在實際任務中表現有限。
- 線性狀態空間層(LSSL)雖然能統一 CTM、RNN 和 CNN 的優勢,並展示了解決 LRD 的潛力,但由於其計算和記憶需求過高,而且實際應用中表現出數值不穩定性,尤其是矩陣 的高度非正規性,使得傳統算法難以穩定應用。
為了解決上述挑戰,作者提出了一種「結構化狀態空間模型」,稱為 S4。
目標是通過對狀態矩陣 的重新參數化與頻率域的生成函數計算,顯著降低計算複雜度與記憶需求,同時在數值上保持穩定性。
解決問題
在離散時間狀態空間模型(SSM)中,若直接進行計算涉及矩陣 的多次相乘,這是計算的主要瓶頸:
- 時間複雜度:對於序列長度 ,計算公式需要 次操作。
- 空間複雜度:存儲隱藏狀態需要 空間。
在這裡,作者透過對角化將矩陣 轉化為更結構化的形式,簡化計算。
對角化(Diagonalization)是一種將矩陣轉換為簡單形式的數學操作。
它的目的是將一個矩陣 表示為以下形式:
其中:
- 是一個對角矩陣,其非零元素位於對角線上,其餘元素為 0。
- 是由 的特徵向量構成的矩陣。
- 是 的逆矩陣。
對角化的好處在於,對角矩陣的計算(例如乘法、求冪)非常高效,可以簡化許多複雜運算。
假設我們需要計算矩陣 的高次冪 。
- 如果直接計算:需要進行 9 次矩陣乘法。
- 如果 已對角化:
- 由於 是對角矩陣,計算 僅需對角線元素各自做 10 次冪運算。
- 最後只需做兩次矩陣乘法(與 和 )。
對角化可以極大地降低矩陣高次運算的計算成本,尤其在大型矩陣或頻繁運算的情境中,對角化是數值優化的重要工具。
給定狀態空間模型 ,共軛變換為 。
透過共軛變換,作者將矩陣 轉化為對角矩陣,進而簡化了矩陣運算。這樣一來,計算公式中的矩陣 可以化為 Vandermonde 矩陣,計算量僅需 。
但對於 HiPPO 矩陣,直接對角化存在數值不穩定問題,因為對角化矩陣 的元素大小呈指數增長,導致數值計算不可行。
S4 參數化:正規加低秩
原文為 Normal Plus Low-Rank,簡稱 NPLR。
在先前的討論中,作者得出結論:應該僅使用條件良好的矩陣 進行共軛變換。理想情況下,矩陣 可被單位矩陣(即條件數為 1 的矩陣)對角化。
根據線性代數的譜定理,滿足此條件的矩陣為正規矩陣,即滿足 的矩陣。 然而,這一類矩陣的範圍有限,特別是 HiPPO 矩陣不屬於此範疇。
儘管 HiPPO 矩陣不是正規矩陣,但可以分解為「正規矩陣」與「低秩矩陣」的和。 直接利用這種分解進行計算並不高效,因為對此分解求矩陣冪次仍然速度較慢且難以優化。
為克服上述問題,作者同時應用了以下三種技術:
- 技術一:透過生成函數求譜
- 不直接計算 ,而是利用其截斷生成函數 ,在單位根 上進行計算後,透過逆快速傅里葉變換 (Inverse FFT) 得到 。
- 技術二:利用矩陣 resolvent 和 Woodbury 等式
- 將生成函數中的矩陣運算轉化為矩陣的逆運算,而非高次冪。
- 使用 Woodbury 等式將 表達為 的形式,有效簡化至對角矩陣的計算。
- 技術三:等價於 Cauchy 核的計算
- 對角矩陣情況可轉化為計算 Cauchy 核 ,這是一個穩定且接近線性時間的問題,已有有效演算法。
上述技術適用於所有可以分解為正規加低秩 (NPLR) 的矩陣。
到這裡,作者提出了本篇論文的第一個定理:
-
定理 1:HiPPO 矩陣的 NPLR 表示
所有 HiPPO 矩陣(如 HiPPO-LegS, LegT, LagT)均具有以下形式的 NPLR 表示:
其中, 是單位矩陣, 是對角矩陣, 是低秩矩陣的分解。
S4 計算複雜度
NPLR 矩陣可以轉化為對角加低秩矩陣形式(DPLR),但需注意其元素由 擴展到 。
當矩陣 表示為 DPLR 形式時,S4 在遞迴與卷積運算上皆達到最佳或近最佳的計算效率。
-
S4 遞迴計算的定理與效率
-
定理 2:S4 遞迴公式的運算效率
經過證明,給定任意步長 ,遞迴公式 (3) 中每一步的計算可在 的運算量內完成,其中 為狀態維度大小。
-
-
S4 卷積計算的定理與效率
-
定理 3:S4 卷積濾波器的運算效率
經過證明,給定任意步長 ,SSM 的卷積濾波器 的計算可歸約為 4 次 Cauchy 矩陣乘法,僅需 的運算量與 的空間。
-
證明的部分請讀者自行翻閱論文,內容實在太多了。
定理 3 是本研究的核心技術貢獻,其演算法體現了 NPLR S4 參數化的設計動機,完整算法流程如下:
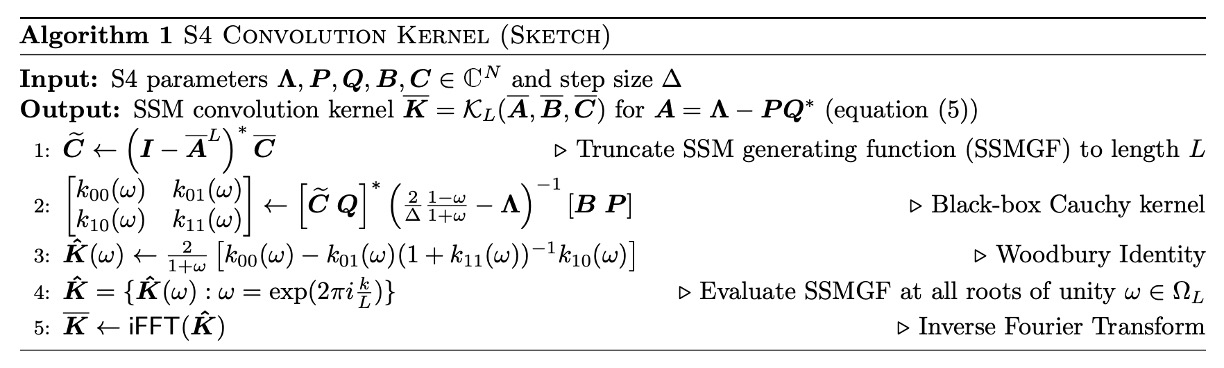
S4 在遞迴運算上達到線性複雜度 ,在卷積運算上達到 ,兼具高效與穩定性,為 SSM 計算奠定了理論與實用基礎。
S4 層的架構細節
在初始化時,S4 層的狀態空間模型 (SSM) 的矩陣 被設置為 HiPPO 矩陣,並根據「定理 1」,該 SSM 與 單位等價。這些參數組成了 S4 層的 個可訓練參數。
深度 SSM 由 個獨立的 SSM 複本組成,每個複本都有相同的參數,但透過位置線性層對特徵進行混合。這樣的設計使得 S4 層能夠處理多維特徵,並在每個位置上進行獨立的狀態轉換。透過多層結構,S4 層形成了一個深度非線性網路。
整體架構提供的輸出形狀與其他序列模型(如 Transformers、RNNs、CNNs)一致,為 。
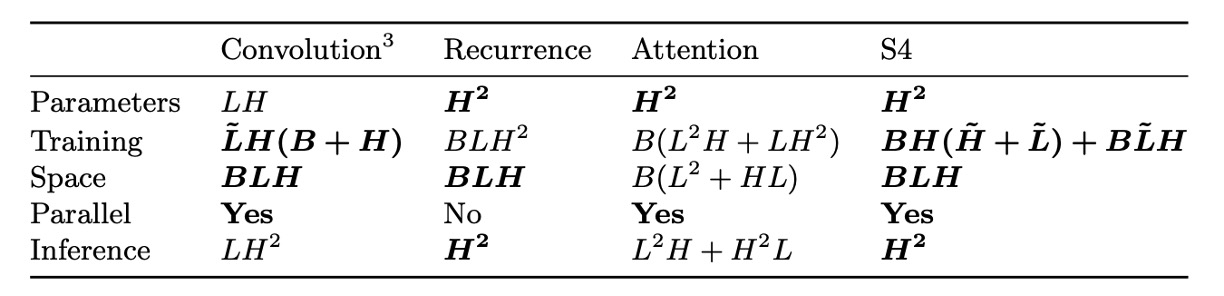
對比其他模型,S4 和卷積神經網路 (CNN) 有著相似的特點,本身是線性變換,但透過多層結構中的非線性轉換,整體深度 SSM 變為非線性。此外,S4 層中跨 特徵的廣播處理方式與深度可分離卷積 (Depthwise-Separable Convolution) 相似,但 S4 的卷積核是全局性的。
下表提供了 S4 層與其他序列模型的計算複雜度比較:
討論
效率基準測試
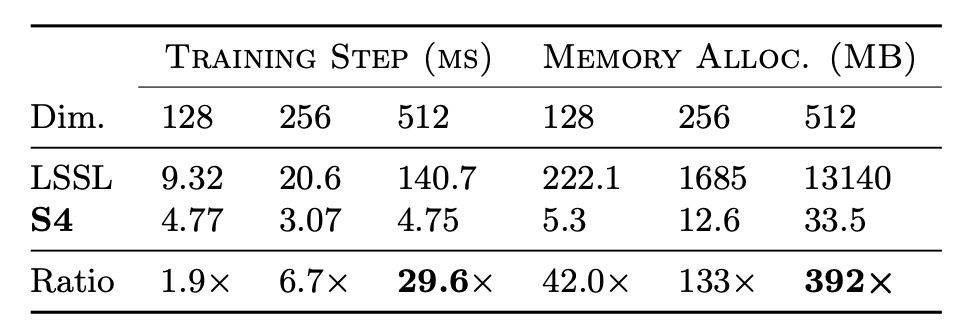
作者為了評估 S4 的訓練速度和資源效率,進行了效率基準測試,首先是與 LSSL 進行比較。
實驗結果如上表,證實了 S4 在實際層大小下,相較於 LSSL,速度和記憶體效率高出數個數量級。
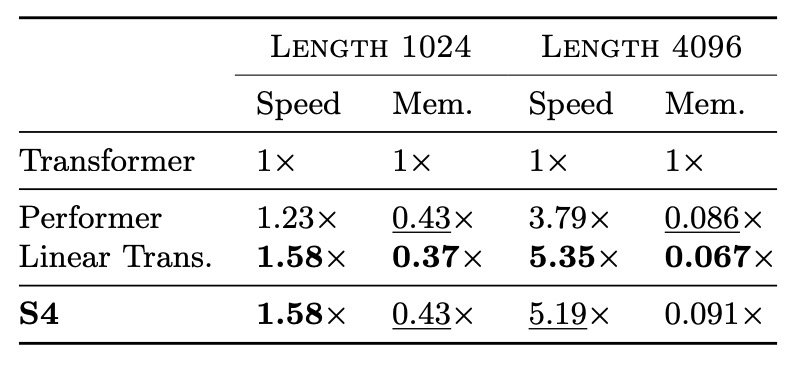
接著,作者將 S4 與 Linear Transformer 和 Performer 等高效 Transformer 模型進行比較,結果如下表所示,在參數量匹配的情況下,S4 的速度和記憶體使用與最優秀的 Transformer 變體相當。
長距離推理之穩定性
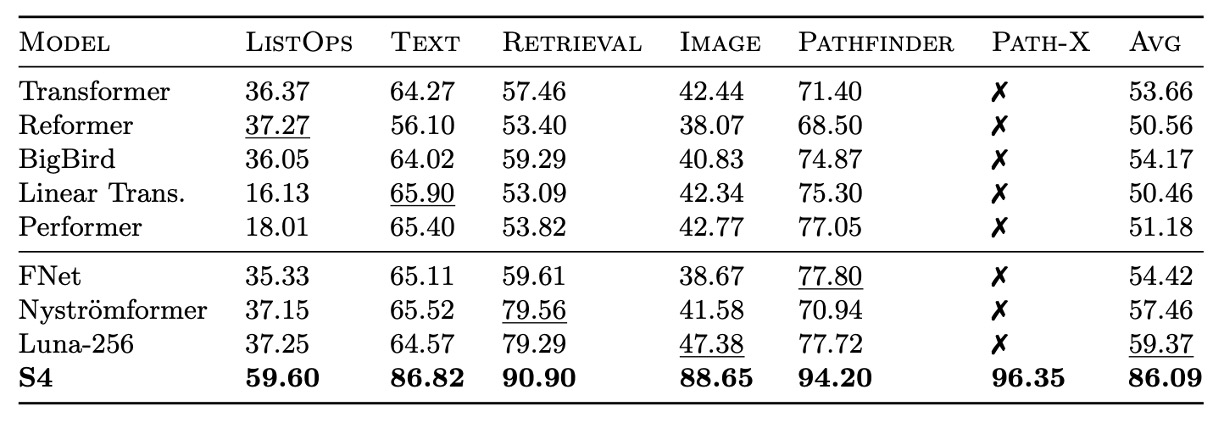
作者進一步探討了 S4 在長距離推理上的穩定性,對比了 S4 和其他模型在 LRA 和原始語音分類等挑戰性任務上的表現。
S4 在 LRA 上的表現遠超過所有基準模型,平均表現為 80.48%,而所有基準模型的平均表現均低於 60%。S4 成功完成 Path-X 任務,展示了其處理長距依賴的能力。
S4 在 SC10 數據集上達到 98.3% 的分類準確率,高於所有基線模型。這驗證了強大的 LRD 模型可以直接從原始數據中提取更多信息,超越手工設計的預處理方法。
可視化分析
作者透過可視化 S4 的學習表示,進一步分析其性能。
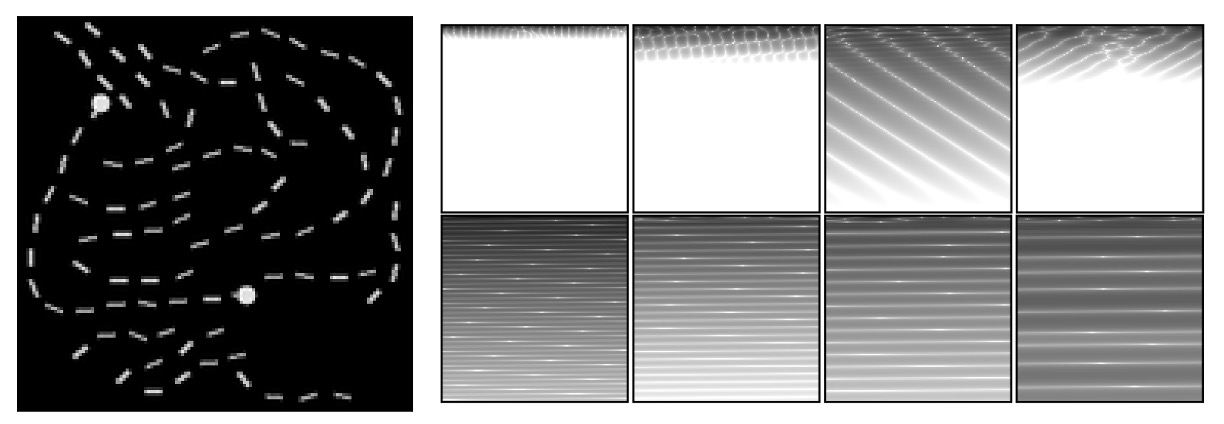
上圖展示了經訓練的 S4 模型在 LRA Path-X 任務中的表現。將 SSM 的卷積核 重塑為 的圖像進行可視化。
左側的圖是 Path-X 任務的一個範例,該任務要求模型判斷兩個標記點是否通過一條路徑相連。
頂部(第一層卷積核)來自 S4 模型第一層的卷積核,顯示學習到的局部上下文特徵,這些卷積核專注於圖像中少量行的局部模式,忽略大部分全局信息。
底部 (最後一層卷積核)來自 S4 模型最後一層的卷積核,顯示全局結構化特徵,這些卷積核跨越整個上下文(16384 像素),學習全局資訊並捕捉不同的空間頻率模式。
結果顯示,S4 的卷積核能夠捕捉序列數據的 2D 結構特性,展示了對長距依賴的深入理解。
可以作為通用模型嗎?
作者為了探討 S4 是否可以作為通用序列模型,進行了一系列實驗。
圖像生成:CIFAR 密度估計
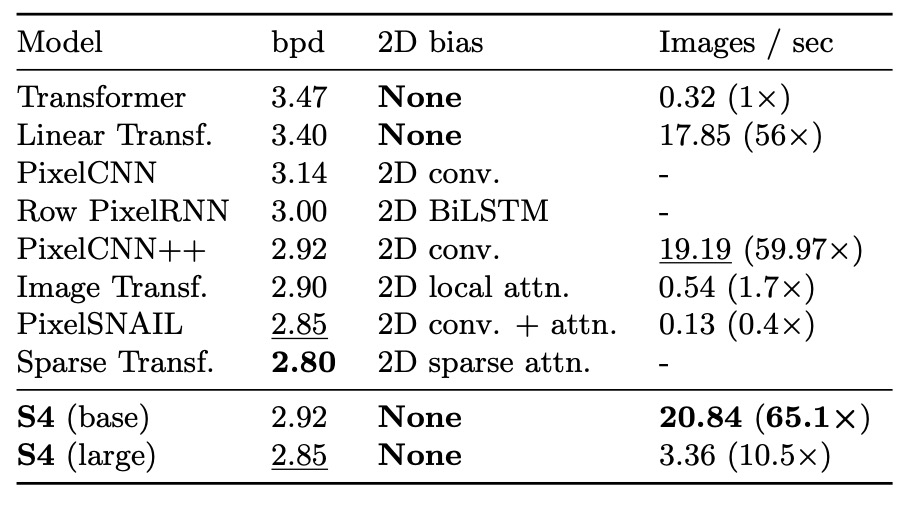
CIFAR 密度估計是一個流行的自回歸圖像建模基準。將圖像展平為包含 3072 個 RGB 子像素的序列,逐個子像素進行預測。
結果顯示,儘管不具有 2D 結構性偏置,S4 在此任務上能與專門設計的模型競爭。
文本生成:WikiText-103
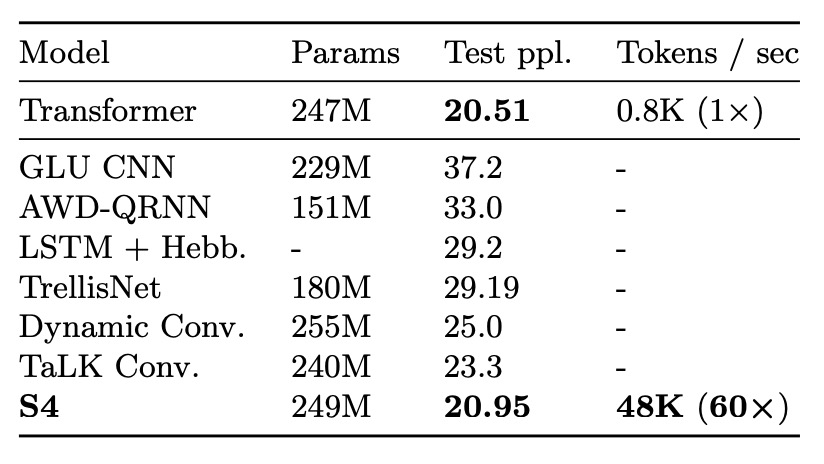
WikiText-103 是語言建模的經典基準,要求模型基於上下文順序預測序列中的詞元。
結果顯示,S4 通過替換 Transformer 中的自注意力層,大幅縮小與 Transformer 的性能差距(僅差 0.8 ppl),並在無注意力模型中創造新的 SOTA(比其他模型優 2 ppl 以上)。
時間序列預測:氣象數據

將 S4 應用於時間序列預測問題,與專為該任務設計的 Informer 進行比較。
結果顯示,S4 在 5 項預測任務的 40/50 個設置中優於基線,尤其在長序列預測上性能顯著,如預測 30 天的氣象數據時均方誤差降低 37%。
從多項實驗中,S4 展現出作為通用序列模型的潛力,能有效處理 LRD 問題並在多種領域和任務中表現出色。其高效生成能力、自適應不同解析度的靈活性,以及在弱結構性偏置下的強大性能,使其成為序列建模研究中的重要候選模型。
HiPPO 的重要性
S4 的關鍵設計之一是使用 HiPPO 矩陣初始化 SSM。
最後作者透過消融實驗驗證各組件的重要性,嘗試解答以下問題:
- HiPPO 初始化的重要性如何?
- 在 HiPPO 基礎上訓練 SSM 是否必要?
- S4 的效益是否僅來自 NPLR 參數化,而與 HiPPO 無關?
所有實驗基於 Sequential CIFAR-10 任務進行,該任務的結果易於推廣至其他設置。模型限制在最多 100K 可訓練參數,使用簡單的階梯學習率調度器,且不採用正則化。
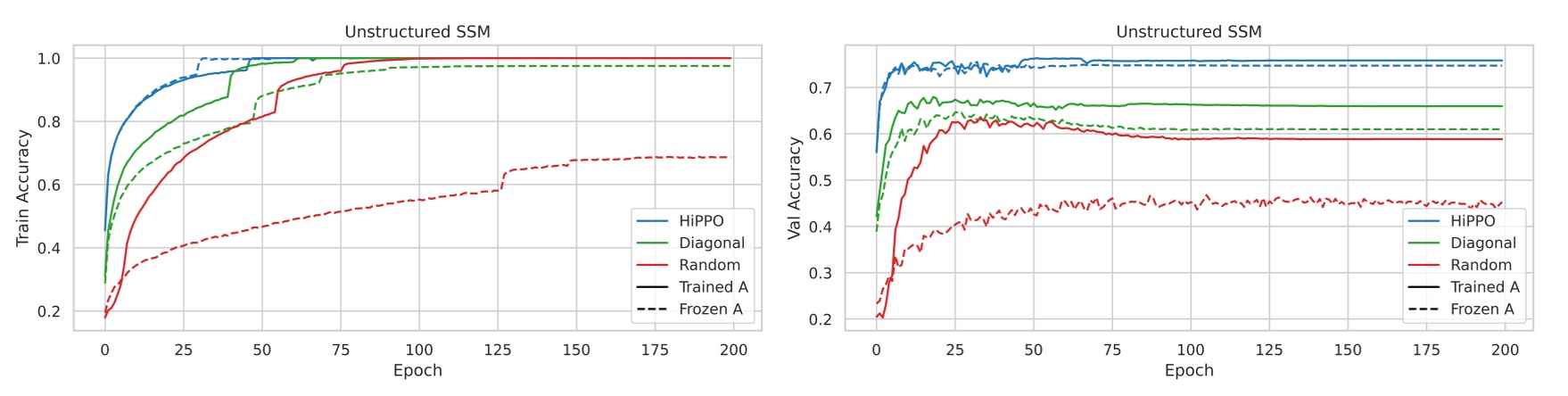
實驗 1:無約束的 SSM 初始化
-
對比初始化方法
- 隨機 Gaussian 初始化:以隨機高斯分佈初始化矩陣 。
- HiPPO 初始化:使用 HiPPO 矩陣初始化。
- 隨機對角矩陣:將 設為隨機對角矩陣,但未使用 S4 的 NPLR 參數化。
- 對上述初始化方法,分別比較凍結與訓練 矩陣的效果。
實驗結果顯示訓練 SSM 對所有初始化方法均有提升,尤其是隨機初始化模型的性能提升最為顯著。
不同初始化方法在驗證集上的表現差異明顯。即使所有模型在訓練集上都能達到完美準確率,但驗證集準確率相差超過 15%,其中 HiPPO 初始化泛化性能最佳。
實驗 2:NPLR 參數化與 HiPPO 的結合
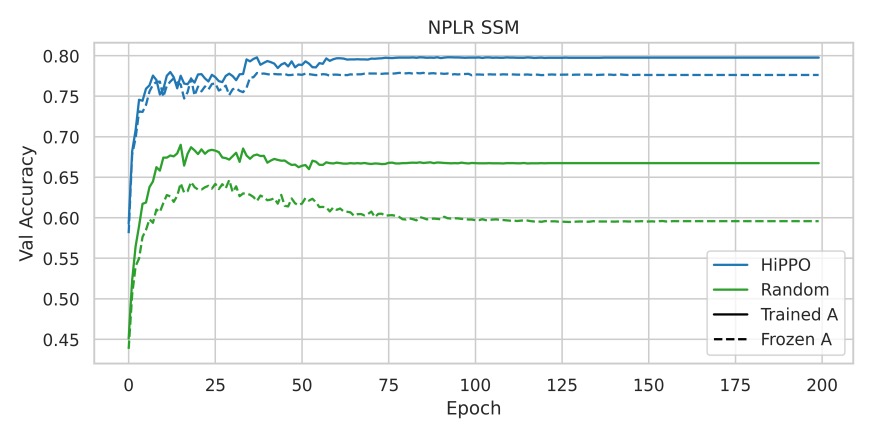
檢驗 HiPPO 初始化是否為 S4 成效的主要來源,而非僅僅來自 NPLR 參數化。
實驗結果如上圖所示,單獨使用 NPLR 參數化但不結合 HiPPO 的 SSM 表現較差,進一步證實了 HiPPO 初始化的重要性。
實驗 3:正則化與完整 S4 方法的性能
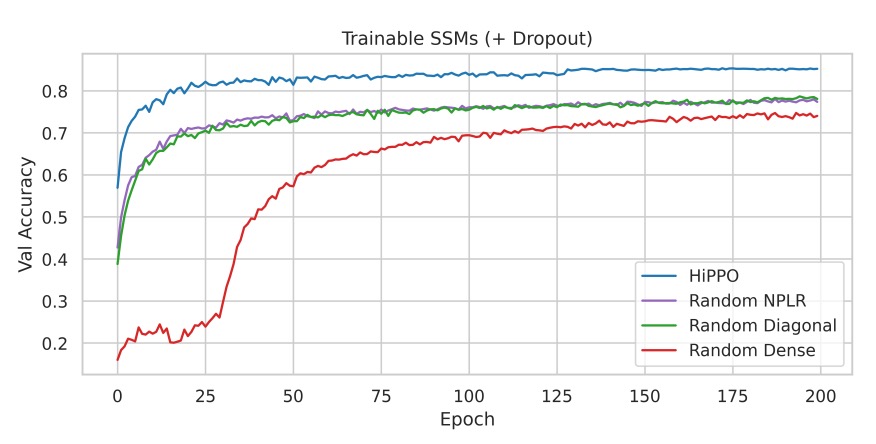
在主消融實驗中加入輕量正則化(Dropout = 0.1),比較 HiPPO 初始化的 S4 與其他初始化方法的性能。
實驗結果顯示即使加入 Dropout,HiPPO 初始化的性能優勢依舊明顯,完整的 S4 方法(HiPPO + NPLR)在測試集上達到 84.27% 的準確率,僅使用 100K 可訓練參數。
結論
作者在這篇論文中提出了「S4」序列模型,透過對狀態空間模型 (SSM) 的參數化創新,結合連續時間、遞迴和卷積視角,有效且有理地處理長距依賴 (LRD) 問題。
在一系列基準測試中,S4 在多種數據模態和模型能力評估上均表現出色,顯示其作為通用序列建模解決方案的潛力,具有廣泛的應用價值和研究意義。
這篇論文對我們來說較為艱澀,我們努力讀完之後仍然不能理解得十分透徹。
對於 S4 的具體實現和技術細節,未來我們需要更深入的研究和實踐。