[23.12] Mamba

誰是繼承人
Mamba: Linear-Time Sequence Modeling with Selective State Spaces
為了讀這篇論文,我們可是費了不少功夫。
首先得先去複習一下作者過去的代表作:
然後是了解這篇論文的主要比較對象,也就是 Transformer 的優缺點。
到這裡,我們假設你已經熟讀之前的幾篇論文,而且也已經具備了足夠的背景知識。
接著,讓我們翻開這篇論文吧。
定義問題
還記得 S4 做了些什麼事情嗎?
S4 延續了之前 SSM 的研究,通過對狀態矩陣 的重新參數化與頻率域的生成函數計算,顯著降低計算複雜度與記憶需求,同時在數值上保持穩定性。
但是,S4 仍然是一個線性時不變系統(linear time invariant, LTI),也就是說,模型動態在整個序列裡都不變(同一組 參數用在所有時間步)。
舉例來說,如果考慮下面這個 Copying 問題,input 一串序列,output 要求複製這串序列「某段資訊」:
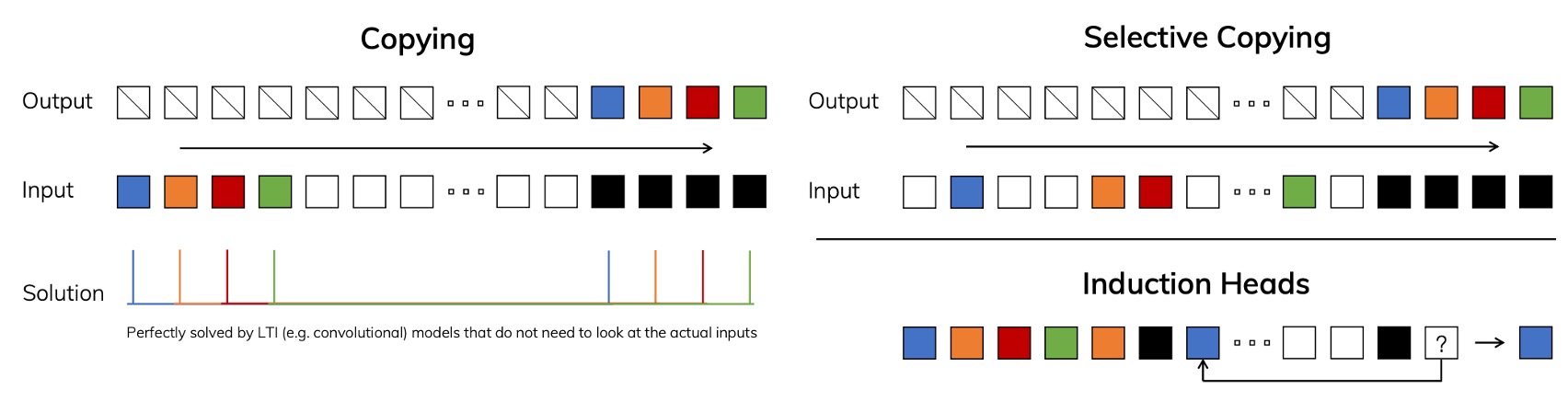
如左圖,如果輸入和輸出之間有固定的時間間隔,這樣的問題對於 LTI 模型非常簡單,因為只要學到固定的位移或卷積核就行。
但如果是右圖這種,輸入和輸出之間有隨機的時間間隔,並且需要「內容感知 (content-aware)」的能力,模型必須分辨哪些 token 真正需要被複製、哪些是無關或噪音,這時就需要模型具有「選擇性」的能力。
這個能力在 LLMs 中非常常見,因為 Transformer 的架構採用了自注意力機制,可以依據上下文內容判斷後面產生什麼輸出。但是 LTI 模型缺乏能「動態改變參數」的能力,因此難以應付這樣的問題。
所以作者認為必須想個辦法,讓 SSM 的幾個關鍵參數 (像 、、) 變成「輸入相依」,也就是說,這些參數會隨著時間步而改變,不再是固定一組值。
解決問題
可選擇機制
首先,先來看一下作者如何將 SSM 的核心演算法改進,讓模型能夠具備「選擇性」。
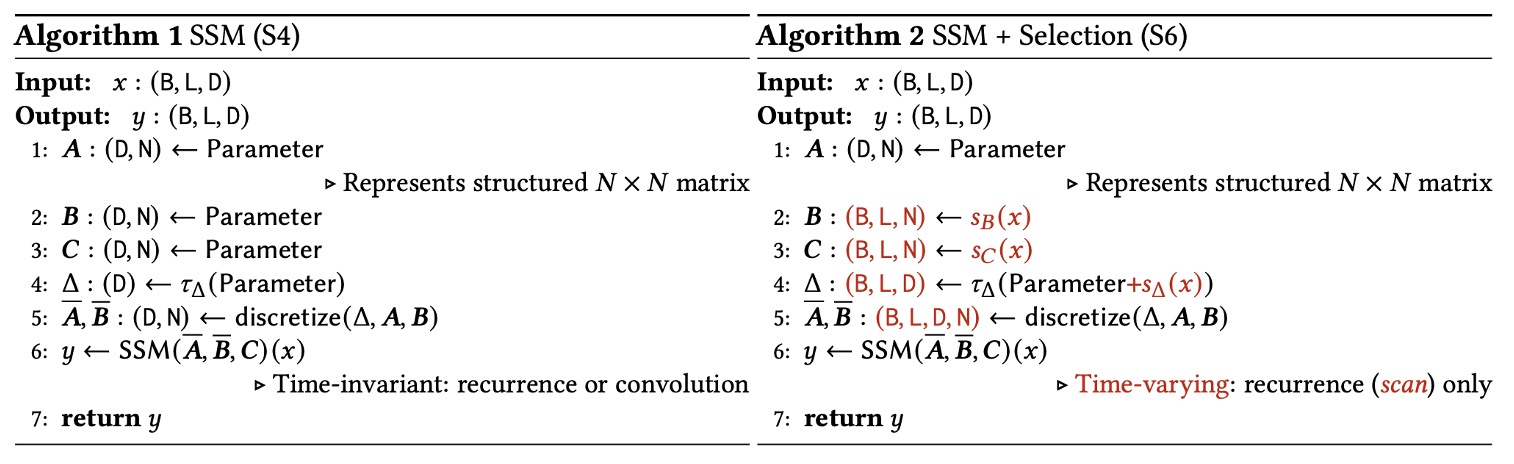
先看 Algorithm 1 (S4):
Algorithm 1 SSM (S4)
Input: x : (B, L, D)
Output: y : (B, L, D)
1: A : (D, N) ← Parameter ⊲ Represents structured N×N matrix
2: B : (D, N) ← Parameter
3: C : (D, N) ← Parameter
4: Δ : (D) ← τΔ(Parameter)
5: A, B : (D, N) ← discretize(Δ, A, B)
6: y ← SSM(A, B, C) (x) ⊲ Time-invariant: recurrence or convolution
7: return y
-
(步驟 1–3) 參數初始化
模型擁有三個核心參數:。
其中 可被視為一個結構化的 矩陣,但實際實作中為了節省參數量,往往會將它對角化或使用其他特殊結構,並以 的方式儲存。
-
(步驟 4) 的設定
是一個維度為 的向量,經過 (例如 )等單調函數處理後,用於離散化轉換。
-
(步驟 5) 離散化 (discretize)
函式
discretize(Δ, A, B)根據 來對連續系統參數 做指數矩陣運算等離散化步驟,得到離散時間下的 。由於此時 與 都是時間不變,離散後的 亦可保持固定。
-
(步驟 6) SSM 計算
因為 (A, B, C) 不會隨著序列位置變化,所以可以用固定卷積(global convolution) 或線性遞迴(linear recurrence) 計算:
- 透過卷積模式,就能一次性、並行地處理整段序列,在訓練時非常高效。
- 在需要自迴歸推理 (autoregressive inference) 時,也可切換回遞迴模式逐步進行。
從上面可以看出來 S4 保留了「線性時間不變 (LTI)」的性質,使得大多數 SSM 都能使用卷積核加速,避免顯式展開整個隱狀態張量,因此在實務中展現極高的效率。
接著來看 Algorithm 2 (S6) 。
這裡引入「選擇性」概念,讓 都能根據輸入 而變動;也因此,它再也不能套用全局卷積或固定遞迴,而要用「掃描」方式進行更新。
Algorithm 2 SSM + Selection (S6)
Input: x : (B, L, D)
Output: y : (B, L, D)
1: A : (D, N) ← Parameter ⊲ Represents structured N×N matrix
2: B : (B, L, N) ← sB(x)
3: C : (B, L, N) ← sC(x)
4: Δ : (B, L, D) ← τΔ(Parameter + sΔ(x))
5: A, B : (B, L, D, N) ← discretize(Δ, A, B)
6: y ← SSM(A, B, C) (x) ⊲ Time-varying: recurrence (scan) only
7: return y
-
(步驟 1) 的結構
與 S4 相同,仍需要一個結構化的 矩陣,但其它部分 () 將隨時間步或序列位置改變。
-
(步驟 2–3) 輸入相依的
在這裡, 與 不再是固定的 形狀,而是對應到 ,表示對每個 batch、每個序列位置,都有一組不同參數值。
- 這些值由函式 與 根據輸入特徵動態生成,實作上通常是一個小型線性投影或 MLP。
-
(步驟 4) 輸入相依的
同理, 也提升到 的形狀,先加上內部參數 (Parameter),再透過 計算後,再經過 (如 softplus),得到最終可學習的「時間變化步長」。
-
(步驟 5) 離散化 (discretize)
因為每個時間步的 都不一樣,所以在離散化過程中也就必須對每個位置分別計算 。
這時 會有 的維度。
-
(步驟 6) 遞迴掃描
由於參數是「時間可變」,不再能用一個固定的卷積核替整個序列做運算,只能用「掃描 (scan)」的方式逐步或並行地更新狀態。
S6 架構
在深度學習中,常見的高效基礎運算包括「卷積 (convolution)」與「注意力 (attention)」。它們透過 GPU 上成熟的實作庫與平行化策略,能充分發揮硬體計算潛能。
現在作者想要把注意力機制換成「選擇性 SSM」,這顯然無法享受到硬體加速的好處,因為 SSM 既不是卷積也不是注意力,而是一種「遞迴」模型。
所以,如果想推廣 SSM,就必須要有一個硬體導向的演算法,讓 SSM 在 GPU 上也能有不錯的效能表現。
為了達到這個目標,作者提出了「選擇性掃描(selective scan)」的硬體導向演算法,核心概念是透過在 GPU 的記憶體階層中巧妙地只展開必要的中間狀態,然後利用平行掃描(parallel scan)與重算(recomputation)技術來減少顯示記憶體(HBM)的讀寫次數。
Selective Scan Structured State Space Sequence Modeling,所以稱為 S6。
先了解一下什麼是 GPU SRAM 與 HBM:
-
SRAM(靜態隨機存取記憶體)
SRAM 是速度極快的記憶體,使用於 GPU 內部的快取記憶體(如 L1 和 L2 Cache)。其特性是資料存取延遲低,非常適合頻繁使用的小數據塊。而限制在於它的容量較小,無法應對大型數據集。
-
HBM(高頻寬記憶體)
HBM 是專為高效能計算設計的外部記憶體,具有極高的數據傳輸頻寬。常用於處理需要大量數據的應用,例如深度學習、科學模擬與影像處理。
SRAM 是 GPU 的「快取」,用於加速小型數據塊的頻繁操作;而 HBM 則是 GPU 的「倉庫」,負責處理數據的傳輸與存儲需求。因此,如果我們想要加速運算,就要盡量減少對 HBM 的讀寫,而是優先使用 SRAM 進行計算。
理解了 GPU 架構後,我們再回來看整體架構圖:
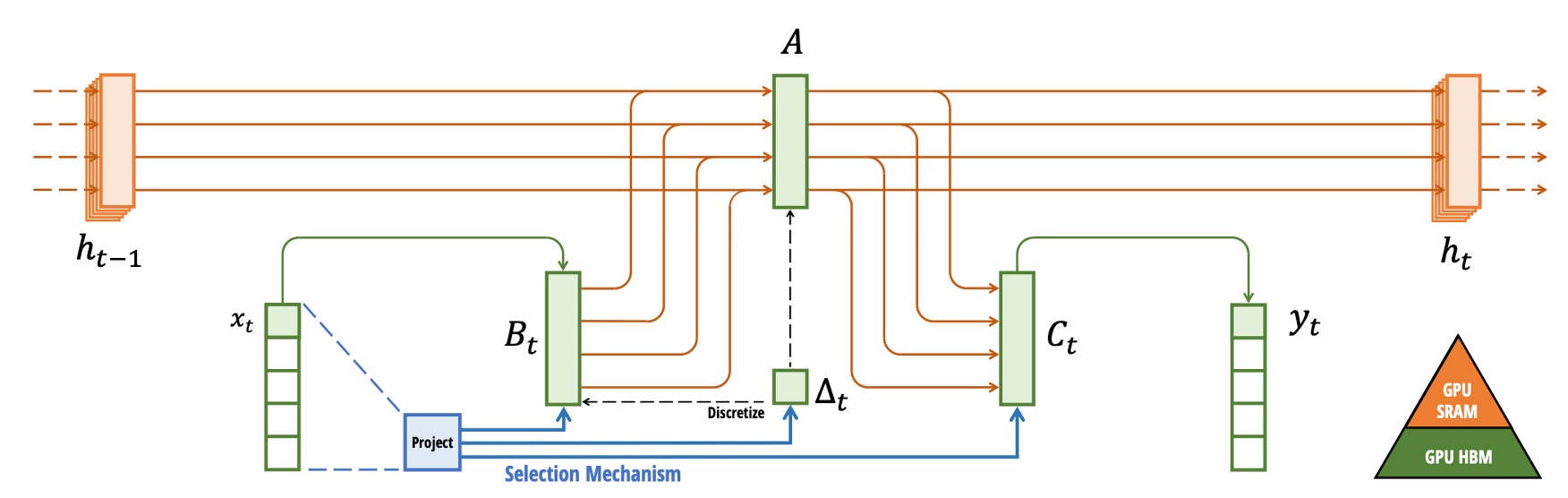
在上圖中,作者舉例了一個 5 通道的 SSM 模型,每個通道都有一個 4 維的隱狀態。如果直接展開,這個模型的狀態空間就會是 維,再乘上 batch size 與序列長度 ,將非常龐大。所以在交換中間狀態的這個步驟,換成選擇性掃描算法,只在必要時才展開。
如上圖所示,首先把參數 () 從 HBM 載入至更快的 SRAM 。接著在 SRAM 做「離散化 (discretization)」和「遞迴更新 (scan)」。
最終只把結果 寫回 HBM。然後把多個原本分開的計算 kernel 合併成一個或少數個 kernel 執行,減少反覆讀寫 HBM 的耗損。
模型在計算反向傳播時,會需要存取前向中的中間狀態。但若每個時間步都存,會消耗大量 GPU RAM。在這裡作者的解決方法是「不要存」!
等到了 backward 的時候,再次從 HBM 載入原本的輸入與參數,重新做一遍前向計算來取得中間狀態。這種「重算 (recomputation)」技術雖增加計算量,但大幅降低記憶體需求,整體看來反而更高效。
如此一來,選擇性 SSM 就能既保有輸入相依的靈活性,又能在實際運行中利用 GPU 的硬體特性達到更高的吞吐量與更低的資源占用,真正提高「遞迴」模型在大規模應用的可行性。
概念上跟 FlashAttention 有點像,都是為了避免在注意力機制中過多的中間結果存取,而採用重算的方式來節省記憶體。
Mamba 架構
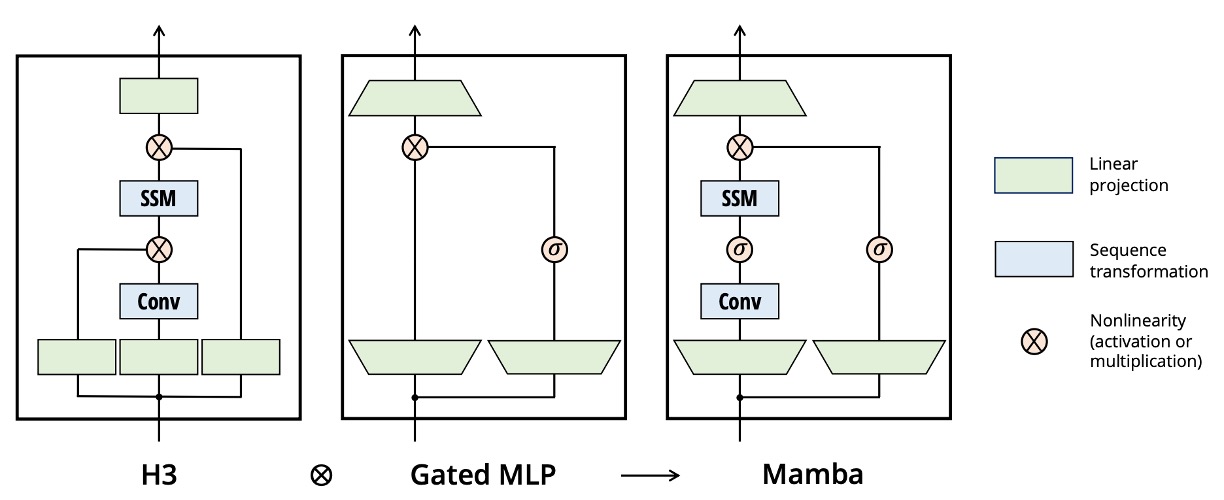
傳統的 H3 架構是常見的 SSM 變體,會在每個區塊中同時包含類似「線性注意力」的部分與一個 MLP(多層感知器)交錯堆疊;而這裡,作者選擇將這兩者合併成單一個體,然後在網路中多次重複,以得到一種更純粹且易於擴充的設計(類似 GAU 對注意力做的簡化)。
在實作上,他們先給模型的維度 加上一個可控制的擴張倍數 ,使得每個區塊主要參數都落在線性投影(投影到輸入與輸出,共三倍數量)上,而真正的 SSM(包含 與 的部分)僅佔小比例。
作者在實驗中固定 ,並使用兩層這樣的區塊,讓整體參數量可對應到與傳統 Transformer 那種「多頭注意力(MHA)+ MLP」混合類似的規模(約 )。
此外,作者為了讓「Gated MLP」更接近當今流行的 SwiGLU 變體,選擇用 SiLU(Swish)作為激活函數,並在相似於 RetNet(同樣在類似位置放置正規化層)的想法下,加入了一個可選用的層正規化(LayerNorm),最終構成「Mamba」的完整架構。
再談選擇機制
作者在方法論的最後,有額外討論了「選擇機制」在 SSM 中的功能與影響:
-
各個「選擇性」參數的詮釋
-
的意義: 可視為一個延伸的 RNN 門控:當 很大時,模型會「重置狀態並專注在當前輸入」;當 很小時,則「忽略當前輸入並保留舊有狀態」。因此從連續時間系統的角度看,「」對應「系統好像花了更多時間處理當前輸入」,「」則幾乎略過了這個時間點。
-
與 的關係:雖然 也能設定成「隨輸入變化」,但作者指出最主要的選擇性還是由 來主導,因為 在離散化時會受 的影響()。只要 能選擇性地增大或縮小,就能對整個動態帶來很大影響。
-
與 的意義:先前就提到「選擇機制的關鍵在於能夠把不要的資訊過濾掉」,而 負責「輸入如何寫入隱狀態」, 負責「隱狀態如何映射到輸出」。把 和 也改成隨輸入而變,就能更細膩地決定是否要讓 進入模型。
-
-
選擇機制的通用性
所謂的「選擇機制」可以應用在很多地方,包括傳統 RNN 或 CNN,也可以對應到不同參數(例如 Algorithm 2 裡的 ),甚至可藉由多樣的輸入轉換函式 來實現。這意味著「選擇機制」不侷限於特定模型,而是整個序列模型領域裡的一種廣義概念。
-
與 RNN 門控(gating)機制的關聯
作者特別強調,RNN 常見的門控機制(如 LSTM 的輸入門、遺忘門,GRU 的更新門等),其實可以被視為一種「選擇機制」的特例。
提示這個部分我們在 S4 的論文中已經有聊過了。
-
選擇機制的三大效果
作者進一步將「選擇機制」的影響歸納出三種重要的「力」:
-
(a) Variable Spacing:因為能動態篩選或忽略某些輸入,模型便能跳過不相關的「填充」或「雜訊」區塊,讓時序上並不一定要遵循等距紀錄。例如在人類語言中,那些「um、啊」等填充詞可以被忽略,模型更專注於真正關鍵的單字。
-
(b) Filtering Context:很多序列模型在遇到超長上下文時,效能不升反降,原因在於它們難以忽略無關緊要的歷史資訊;而有選擇機制的模型隨時可以把無用訊息丟掉或重置,使得隨著上下文愈長,效果可以理想地持續提升。
-
(c) Boundary Resetting:在實際任務中可能把多個獨立序列拼接起來一併處理,如果模型沒有選擇機制,就會把這些分段上下文「搞混」;有選擇機制的模型可以在邊界處重置狀態(如 或 ),避免前後序列互相干擾。
-
訓練方法與協定
作者使用 Pile dataset 進行預訓練,這是業界常用於語言模型的大型語料庫,並且使用了與 GPT-3 相似的訓練配方(例如使用對應規模的深度與寬度)。
詳細訓練超參數與設定請參閱論文附錄 E.2。
-
模型比較對象
-
Transformer (GPT3 架構):這是最傳統、標準的 Transformer-based GPT3 類語言模型,帶有多頭注意力機制。
-
Transformer++:作者特別提到,這是「目前所知最強的 Transformer 配方」,結合了 PaLM、LLaMa 等模型中的最佳實踐,包括:
- Rotary embedding
- SwiGLU MLP
- RMSNorm (取代 LayerNorm)
- 不使用線性偏置 (no linear bias)
- 更高的學習率 (high learning rates)
-
其他次量級 (subquadratic) 架構:一些近期被提出的、希望能比注意力 (attention) 更省計算成本或更具伸縮性的模型,如 RWKV、RetNet 等,也一併進入比較。
-
-
實驗方法與結果
-
Chinchilla 協定:作者遵循「Chinchilla」評估方法,對從 ≈125M 到 ≈1.3B 參數規模的模型進行測試。這個方法通常會考量「模型參數量」與「訓練 token 數量」之間的平衡,觀察「同等花費」下的最優結果。
提示如果你對 Chinchilla 不熟悉,可以參考我們之前讀過的文章:
-
討論
Scaling Laws
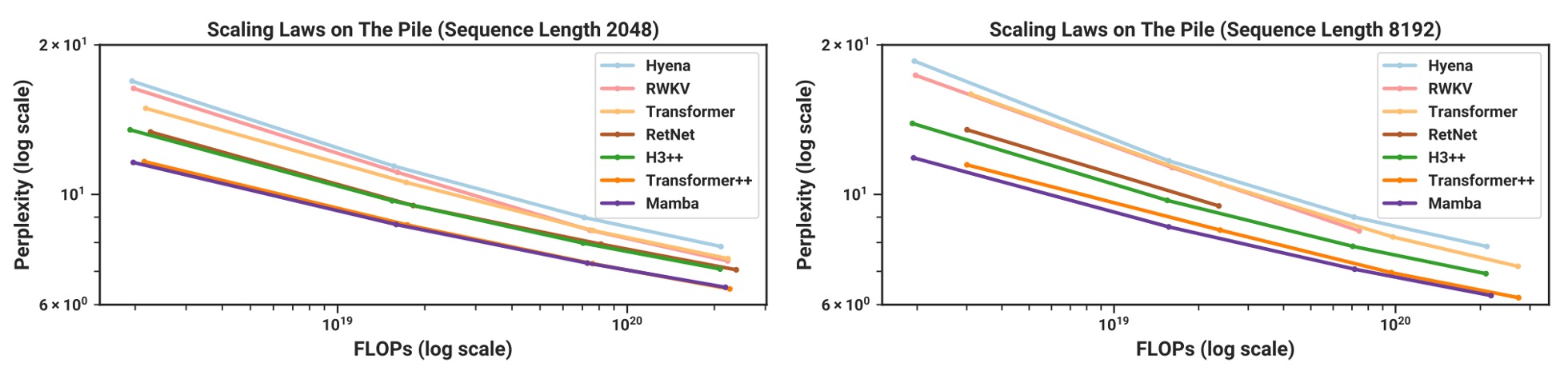
根據實驗結果,上圖顯示當序列長度增加時,Mamba 在困惑度 (perplexity) 指標上已經能追上使用強化配方的 Transformer++。
作者特別強調,Mamba 是第一個「不使用注意力」卻能與現有最強 Transformer 相抗衡的線性時間架構。RWKV 和 RetNet 雖然同樣是「次量級」架構,但在長序列上的表現並不如 Mamba 穩定。對長序列(例如 8k tokens)時,Mamba 的優勢尤其明顯。
和其他語言模型的比較
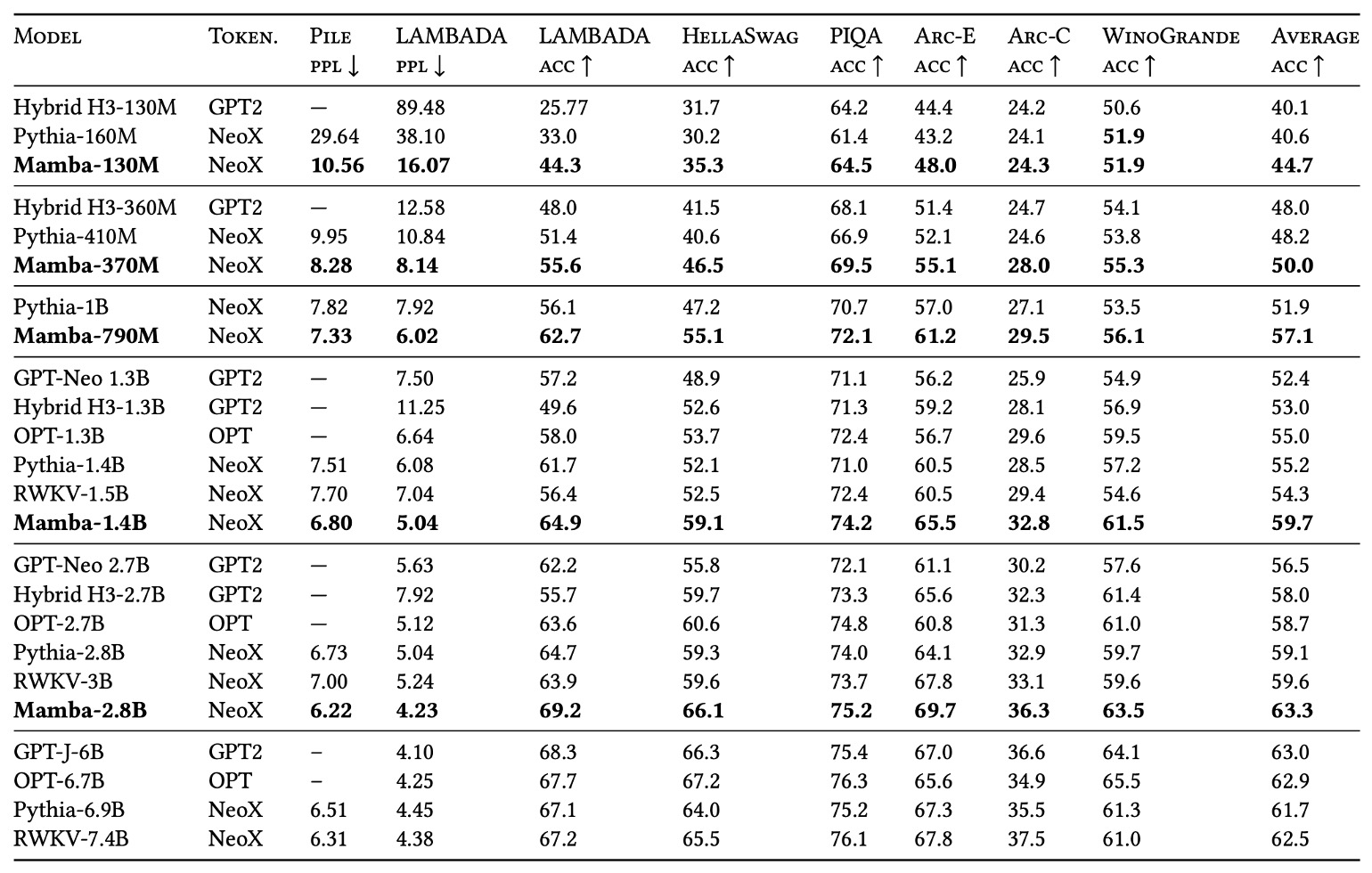
作者選用了多個常見的零樣本 (zero-shot) 下游任務,包含一些廣為人知的知識推理、常識問答、完形填空等基準,並與 Pythia、RWKV 等模型進行對比。
- Pythia:著名的開源模型,與 Mamba 使用相同分詞器 (tokenizer) 與資料集 (Pile),並且也同樣訓練了 300B tokens。
- RWKV:一種 RNN 式的語言模型,在概念上也可被視為某種狀態空間模型 (SSM),不過它的 context length 設為 1024。
根據實驗結果顯示,在相同參數量下,Mamba 幾乎在所有基準上都優於同等規模的競爭對手。而且 Mamba 的表現甚至能「匹敵」或「超越」參數量是它兩倍大小的其他模型,顯示此架構在同等訓練條件下可能具有更好的「參數效率 (parameter efficiency)」。
整體來看,Mamba 不僅在預訓練 perplexity 與 scaling laws 表現上具備與強化 Transformer 不相上下的潛力,更在多個零樣本任務上直接勝過同等參數規模的開源模型,展現出它在語言建模領域裡的強大可競爭性。
推論效率比較
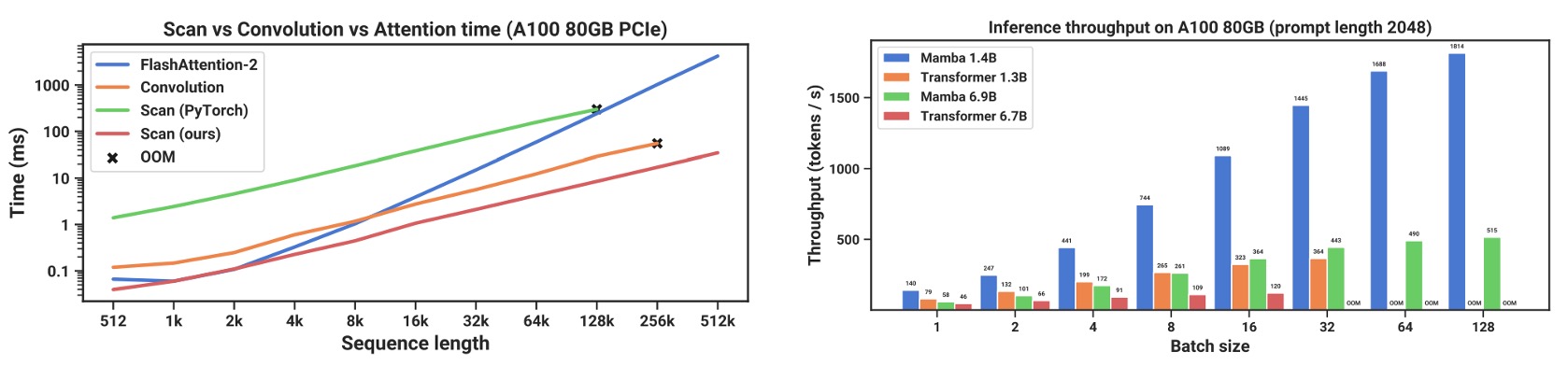
作者也針對「掃描運算 (scan)」以及整個 Mamba 模型在推理階段的吞吐量(throughput)與記憶體使用量,做了詳細的效能對比。
結果如上圖,相較於 FlashAttention-2,在序列長度超過 2K 時,SSM 掃描更快。與 PyTorch 中的標準掃描(scan)實作相比,則可達到 20–40 倍速度提升
這部分可歸功於作者所提的硬體導向優化(kernel fusion、平行掃描、重算等)。
在推理階段,Mamba 可以省去類似 Transformer「注意力快取(KV cache)」的需求,允許更大的 batch size,進而大幅提高吞吐量。
以一個規模為 6.9B 參數的 Mamba 模型為例,在推理吞吐量上可以超越體量「5 倍小」的 1.3B Transformer。如果和同尺寸的 Transformer 比較,Mamba 在推理時通常能比同等尺寸的 Transformer 快上 4–5 倍。
消融實驗-選擇機制

作者比較了不同結構與其內部的 SSM 實作:若採用先前不具選擇性的(LTI)SSM,等價於全域卷積(global convolution),不論是複數或實數都能達到相近的效果;這也說明了對於語言模型而言:「將複數換成實數並不會明顯犧牲效能,卻可以在硬體效率上更具優勢」。
然而,一旦將 LTI SSM 替換成具選擇性的 SSM(S6),就能顯著提升表現。作者進一步指出,在同樣採用選擇性 SSM 的情況下,Mamba 與 H3 這兩種整體架構表現非常接近。
消融實驗-關鍵參數
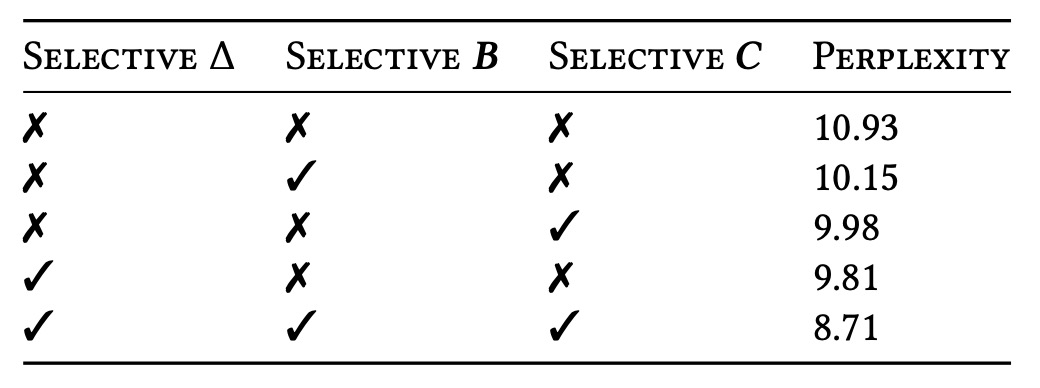
接著,作者比較不同參數(Δ, B, C)的「是否選擇性」設定,結果顯示最關鍵的是 Δ,也就是與 RNN gating 直接對應的那個參數:當 Δ 成為輸入相依的變量後,模型在長序列或高雜訊序列中更能選擇性地忽略不相關訊息,因此有最大化的收益。
消融實驗-其他設定
之後作者探討了對 SSM 做不同初始化(尤其是實數或複數),並指出在語言模型環境下,實數型的對角初始化往往比複數型更理想,甚至隨機初始化也能取得不錯的結果,顯示模型並不那麼仰賴特殊的複數初始化來獲得穩定性或較佳收斂。
最後,作者特別強調當隱狀態維度 N 增大時,選擇性 SSM 的困惑度能有大約 1.0 的明顯改善,代價卻只有大約 1% 的額外參數量,這正好驗證了前面提出的核心論點:
只要配合正確的選擇機制與硬體導向演算法,便能在增大狀態維度後同時兼顧效能與效率,讓模型獲得更強的建模能力而不造成嚴重的計算或記憶體負擔。
結論
在這篇論文中,作者完全捨棄了注意力機制,並提出了一個「選擇性機制 + 狀態空間模型」的解決方案:Mamba。
實驗結果顯示,Mamba 可以在多種類型的資料(從語音到基因組,再到語言文本)上匹敵甚至超越當今性能強大的 Transformer 模型,同時保有更好的推理速度與記憶體效率。
作者期待 Mamba 可以成為通用序列模型的骨幹,並在未來的基因組、音訊、視覺等超長序列任務中發揮更大的作用。
過去所有基於 Transformer 所做的嘗試,都可以在 Mamba 架構中重新做一次,又是一個海量新論文的開始!