[24.06] MAR

重鑄生成的秩序
Autoregressive Image Generation without Vector Quantization
本篇同步發表於 nbswords 的 Medium
當前的自迴歸圖片生成模型常使用 vector quantized(VQ)將圖片離散化成一個個 token 來模擬自迴歸模型在 NLP 領域上的成功,但作者認為這種離散值空間對於自迴歸圖片生成模型並不是必要的,因此提出一種基於連續空間的自迴歸圖片生成模型,兼具更高的準度以及快速的推論時間。
背景知識
Vector Quantization (VQ)
這是一種行之有年的向量搜尋加速技巧,作法是將一個特徵空間向量(embedding vector)切割成不同的群組,每個群組以一個代表向量來當做 index,再透過一份包含所有代表向量索引的 codebook 來存取這群向量。
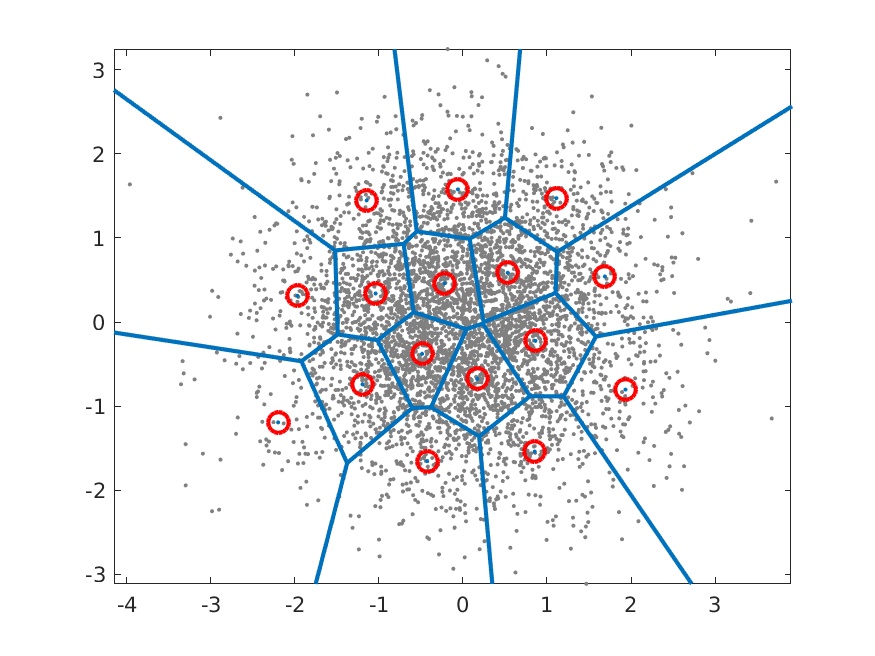
詳細作法可參考 Survey Of Vector Space Search 或是 Vector quantization wiki
Auto-regressive image generation
早期的 Visual Autoregressive Model (VAR)是直接將圖片生成任務模擬成 GPT-like 的自迴歸文字生成,透過將圖片每一個像素都視為一個種類,模型的任務使用 categorical cross entropy 做多類別預測,如 Google 的Image Transformer, 2018和 OpenAI 的ImageGPT, 2020都屬於這種方法
而為了加速圖片生成的速度,現在的自迴歸圖片生成模型的常見作法是引入 VQ 做兩階段訓練,第一階段先在 latent space 中學習用來做圖片重建的 codebook,第二階段則基於這個 learned codebook 去自迴歸地生成圖片
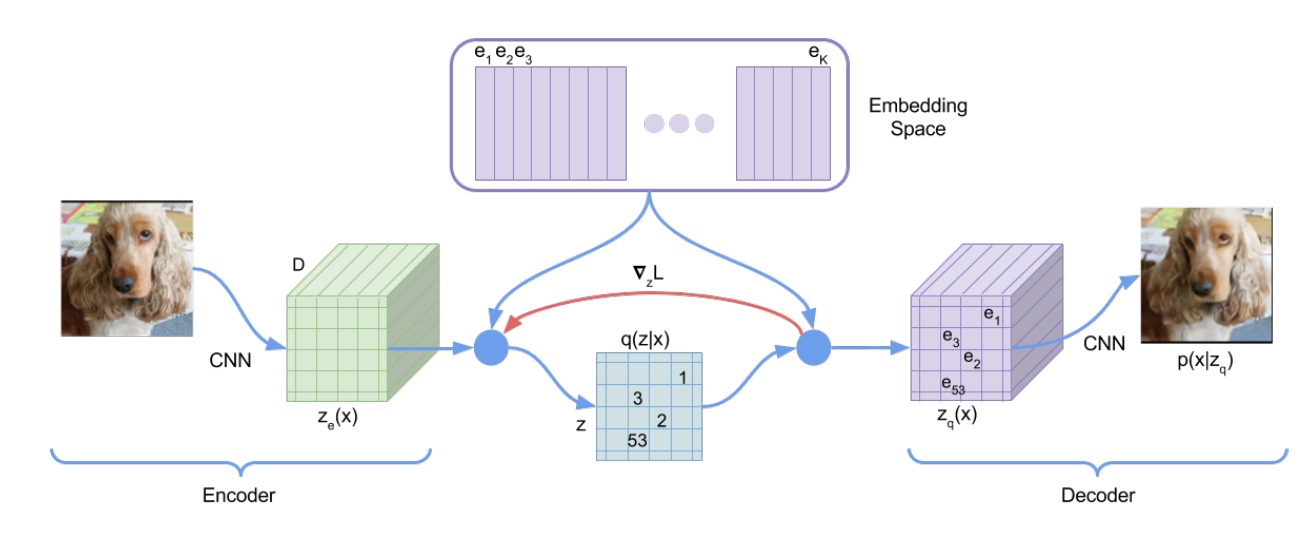
- 以VQ-VAE, 2017為例
- Encode 階段先透過是一個 CNN 擷取出圖片特徵,然後對 feature map 做 VQ,得到每個群組的代表向量(紫色的向量, ~ ),接下來計算 中每一個特徵點跟代表向量之間的距離,取距離最近的代表向量 index 來取代掉他們得到 ,這個 正是離散的特徵。
- Decode 階段則使用從 映射回來的 做圖片生成。
自迴歸模型透過 VQ 來加速圖片生成聽起來很棒,但是,這樣的方法難道沒有什麼缺點嗎?
當然有,1. VQ 編碼器很難訓練 2. VQ 會降低重建出來的圖片品質
Method
放棄 VQ,擁抱 Diffusion
既然 diffusion model 可以用來表現一張圖片中所有 pixels 或 tokens 的聯合機率分布,那為何不能用來表現每一個 token 的機率分布呢?
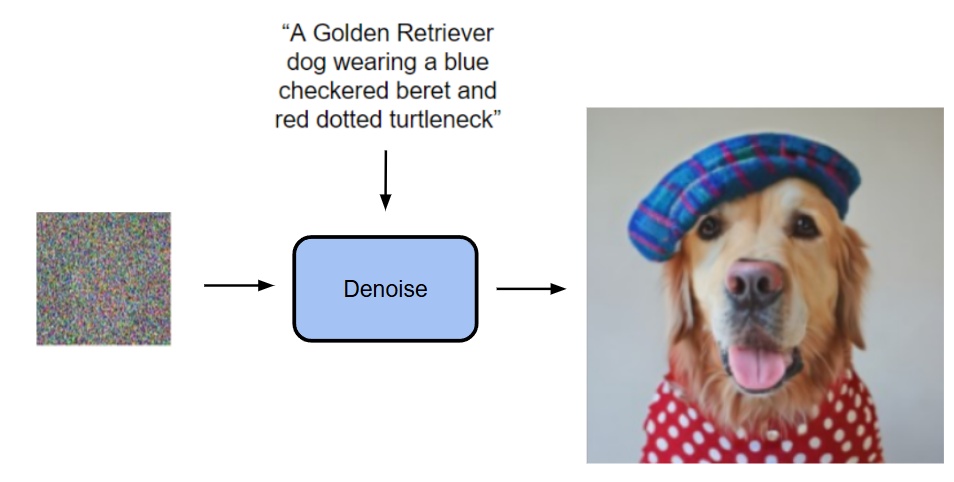
- Diffusion 可以將輸入的 prompt/image 作為條件從 noise 中產圖
- 而現在是改為將一個 transformer 的輸出作為條件從 noise 中產圖 (這個 transformer 的輸入是什麼等等會講到)
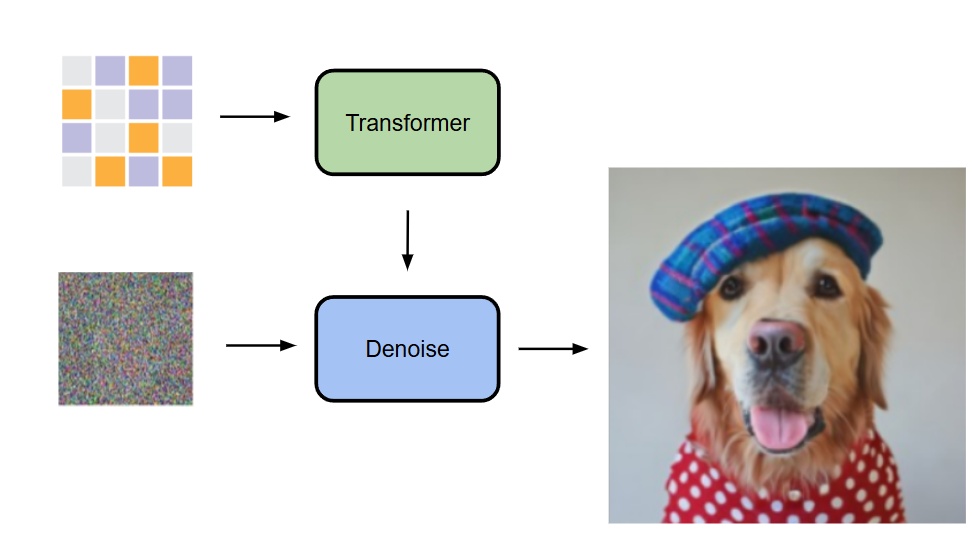
他們的做法是自迴歸地去預測出每一個 token 的條件 z,然後利用一個 diffusion model(small MLP)做 denosing 來得到 output x 的機率分布 p(x|z)
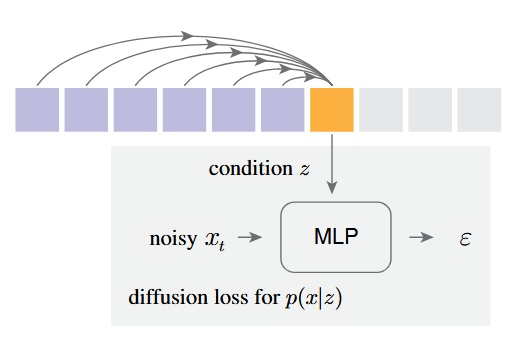
提出 Diffusion Loss 來取代原本的 categorical cross entropy


- ε 是一個從(0, 1)常態分布中抽樣出來的noise sample
- εθ 是一個 small MLP, 的意思是這個模型會基於t跟z作為生成條件,然後輸入x_t來得到noise vector ε_θ
- t是noise schedule的 timestamp,z是由Transformer基於上下文產生出來的condition vector
最後,跟 DDPM 一樣,在推論階段,模型會透過 reverse diffusion process 來產生出圖片 (從 x_t -> x_0)

除此之外,若讀者們有使用過 diffusion model 來做圖片生成肯定曾看到過一個超參數叫做溫度(temperature),溫度越高表示有越高的隨機性,溫度越低則隨機性越低,這是一個控制採樣隨機性的參數,在本作中採用溫度 * 來控制,這個方法出自Diffusion Models Beat GANs on Image Synthesis
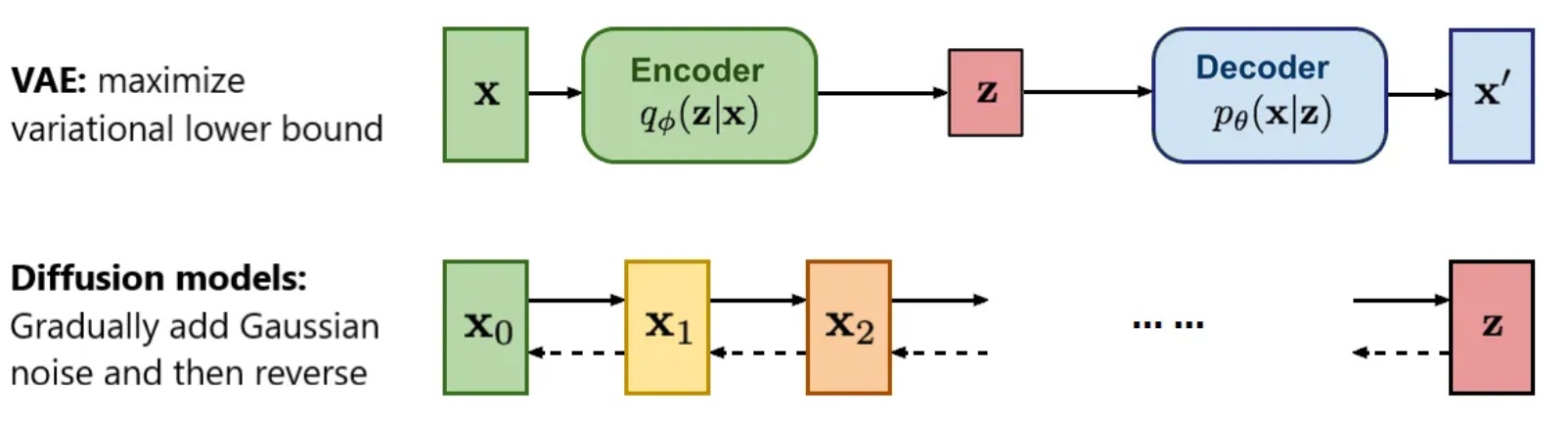
仔細想就會發現,這是一個將 VAE 的條件生成以及 DDPM 的降噪結合在一起使用的方法,用 VAE 壓縮圖像特徵並用 DDPM 來生成圖片,非常精妙
融入 Autoregressive 和 Masked Generative Models 的概念
愷明作為MAE(Masked Autoencoders Are Scalable Vision Learners), 2021的作者,接下來想到的當然是將 MAE 的概念一起融入到模型當中
- 主要的流程參考 MAE 的後續作品MaskGIT, 2022和MAGE, 2022,兩者都是拿 Transformer 做 Masked Autoregressive(MAR),其中 MaskGIT 的貢獻是使用 bidirectional transformer decoder 去同時預測多個 token 而 MAGE 的貢獻是統一圖片表徵學習與圖片合成
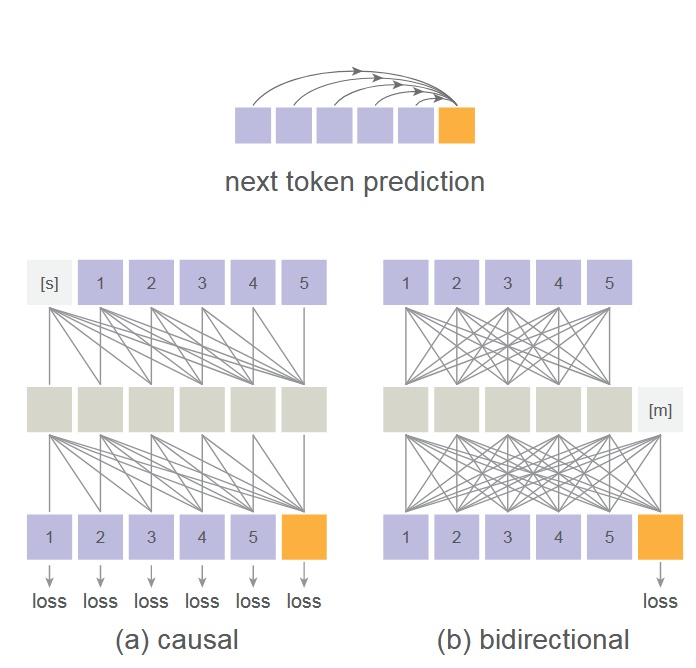
- 在本作中同樣採用了 MAE 的雙向注意力機制,將 mask token [m]放在中間層讓所有 token 能看見彼此,而不是只能看到前面的 token,並且只對沒有被 mask 到的 token 計算 loss - 請注意,這並不是一般認為的 causal vs bidirectional attention,若想要深入理解請去閱讀 MAE 原始論文 - 這樣做的好處是圖片生成的表現會變好,壞處是這會讓 transformer 的訓練和推論無法使用 kv cache 加速,但也由於可以同時預測多個 token,這個方法並不會太慢
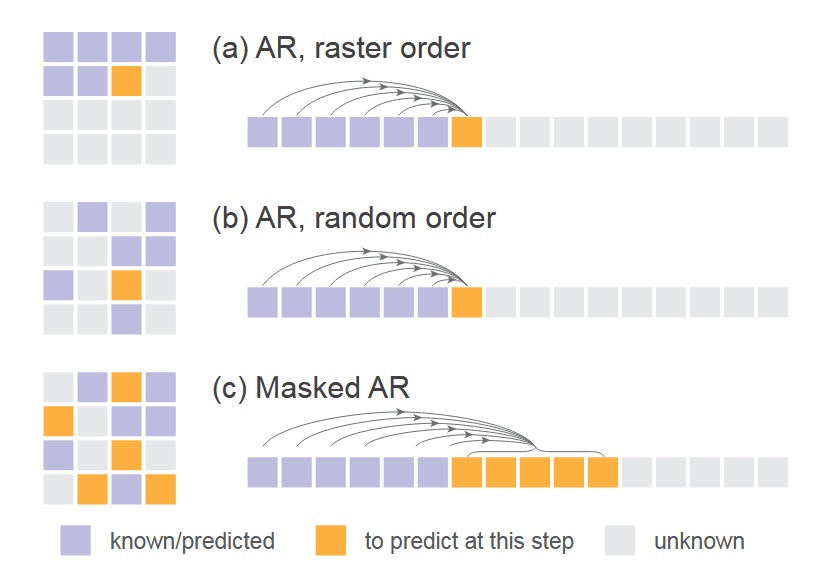
- 下圖是一般順序的 AR、隨機順序的 AR(random masking one token)和他們使用的同時預測多個 token 的 AR(random masking multiple token)的比較 - 這裡就揭曉了前面那個 transformer 的輸入是一個 masked image
Implementation
- Diffusion Loss:cosine 形狀的 noise schedule,訓練時 DDPM 有 1000 step 而推論則僅有 100 step
- Denoising MLP(small MLP):3 層 1024 個 channel 的 block,每一個 block 包含 LayerNorm, linear layer, SiLU 激活函數並使用 residual connection 連接,實作上是使用 AdaLN 將 transformer 的輸出 z 加入到 LayerNorm 層當中
- Tokenizer:使用 LDM 提供的公開 tokenizer,包括 VQ-16 和 KL-16。其中 VQ-16 是基於 VQ-GAN 的量化模型,使用 GAN loss 和感知 loss,KL-16 則透過 KL 散度做 regularization 且不依賴 VQ
- Transformer:使用 ViT 來接收 tokenizer 處理後的 token sequence,加上位置編碼和類別 token [CLS],然後通過 32 層 1024 個 channel 的 transformer block
- Masked autoregressive models:在訓練階段使用 [0.7, 1.0] 的 masking ratio,0.7 代表隨機遮蔽掉 70%的 token,另外為了避免抽樣出來的序列太短,他們始終 pad 64 個[cls] token 到其中。在推理階段會逐步將 1.0 的 masking ratio 降低到 0,並使用 cosine schedule 來調整步數,預設是 64 步
- Baseline Autoregressive Model: causal attention 的 GPT 模型,輸入有 append 一個[cls],並且有使用 kv cache 以及溫度參數
Experiments
模型實驗設定都是 AR/MAR-L (∼400M parameters), 400 epochs, ImageNet 256×256
Diffusion Loss vs. Cross-entropy Loss
在所有 AR/MAR 的變體之下,使用 Diff Loss 的表現都比較好,其中 AR 的改進最少,越往下改進越多,MAR+bidirect+>1 preds 的改進最多,可見 Diff Loss 對於 MAR 模型的重要性
- Diff Loss 也有使用其他擴散模型也有的 CFG(Classifier-Free Guidance)來提升生成效果
- Fréchet inception distance (FID) 是越低越好,Inception Score (IS)則是越高越好,兩個 metrics 都是在衡量生成的圖片品質

Tokenizers
實驗不同的 tokenizers 搭配 Diff loss 的效果,由於從離散空間脫離到了連續空間,tokenizer 不再受限,Diff loss 可以適用在連續/離散的 tokenizer 上
- VQ-16 指的是將 VQ-VAE 中作 VQ 之前的連續值 latent 作為 token,前面也有提過這裡的 VQ-16 跟 KL-16 都是使用 LDM 提供的,只是他們改為在 ImageNet 上訓練而非 OpenImages 上
- Consistency Decoder 是一個非 VQ 的 Tokenizer,來自DALL·E 3
- reconstruction FID (rFID) 越低越好,用來評估 tokenizer
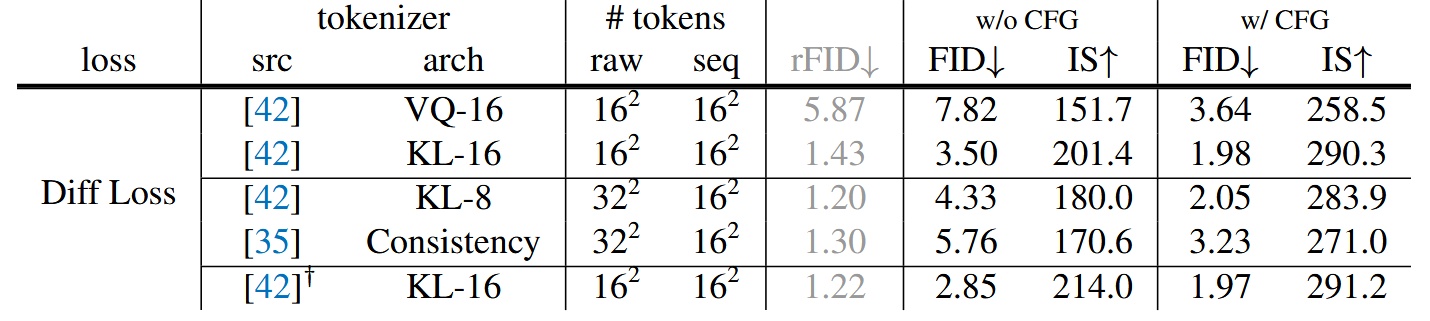
結果顯示使用連續型的 tokenizer 如 KL-16 會比離散型的 VQ-16 表現好,另外也順便展示了一下能兼容在不同的 tokenizer 如 Consistency Decoder 上
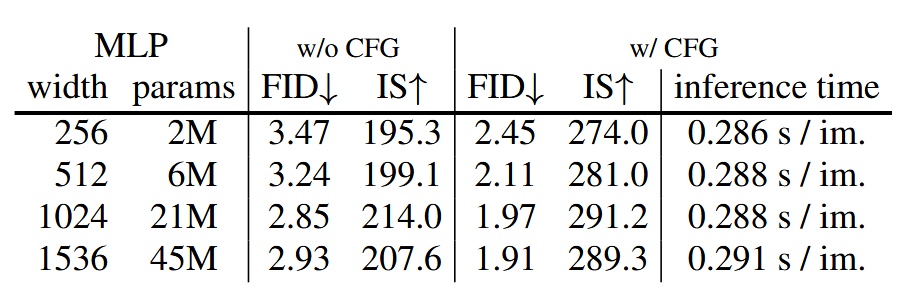
Denosing MLP
不同參數大小的 MLP 表現差異,width=1024 的表現最好
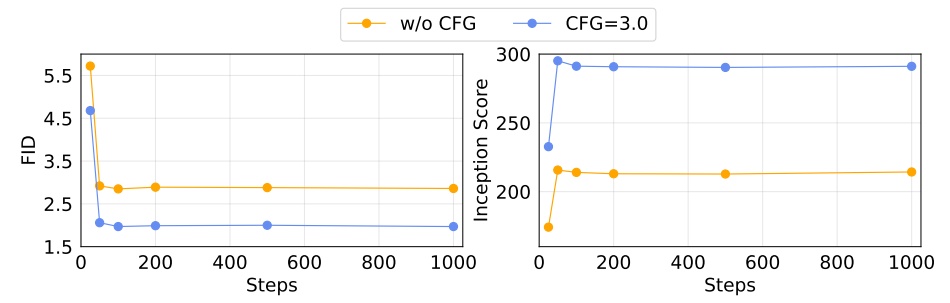
Sampling steps of Diffusion Loss
不同 Diffusion steps 對於生成品質的影響,steps=100 就可以獲得很好的效果
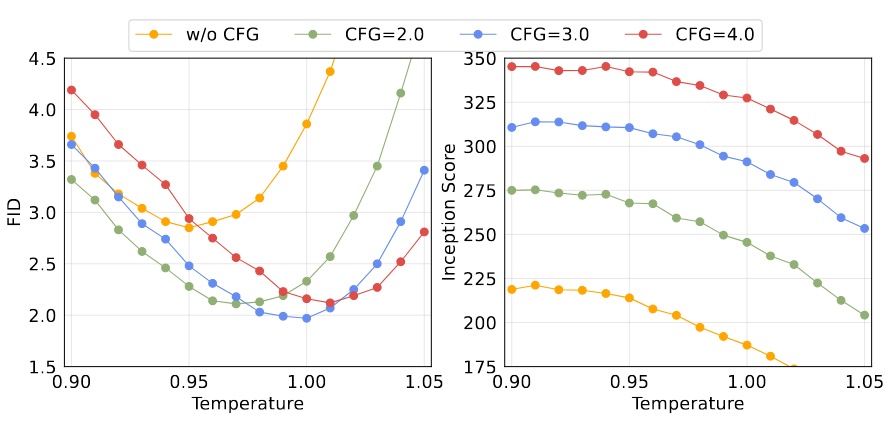
Temperature of Diffusion Loss
對 Diff Loss 來說溫度也很重要
Speed/accuracy trade-off
由於無法使用 kv cache,這個評估非常重要,這裡是用一個 A100 然後 batch size=256 來測試
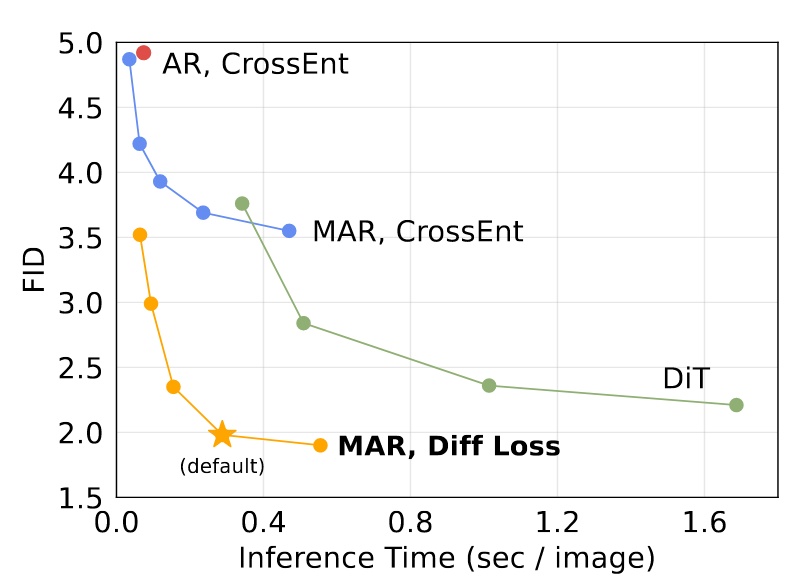
- MAR: 每一個點代表不同的 autoregressive step(8 to 128)
- DiT: 每一個點代表不同的 diffusion steps(50, 75, 150, 250),這裡使用的 DiT-XL
- AR: 套用了 kv cache
可見即使無法使用 kv cache 這個模型也有不差的推論速度,不過 default 設定(step=64)還是慢了不少
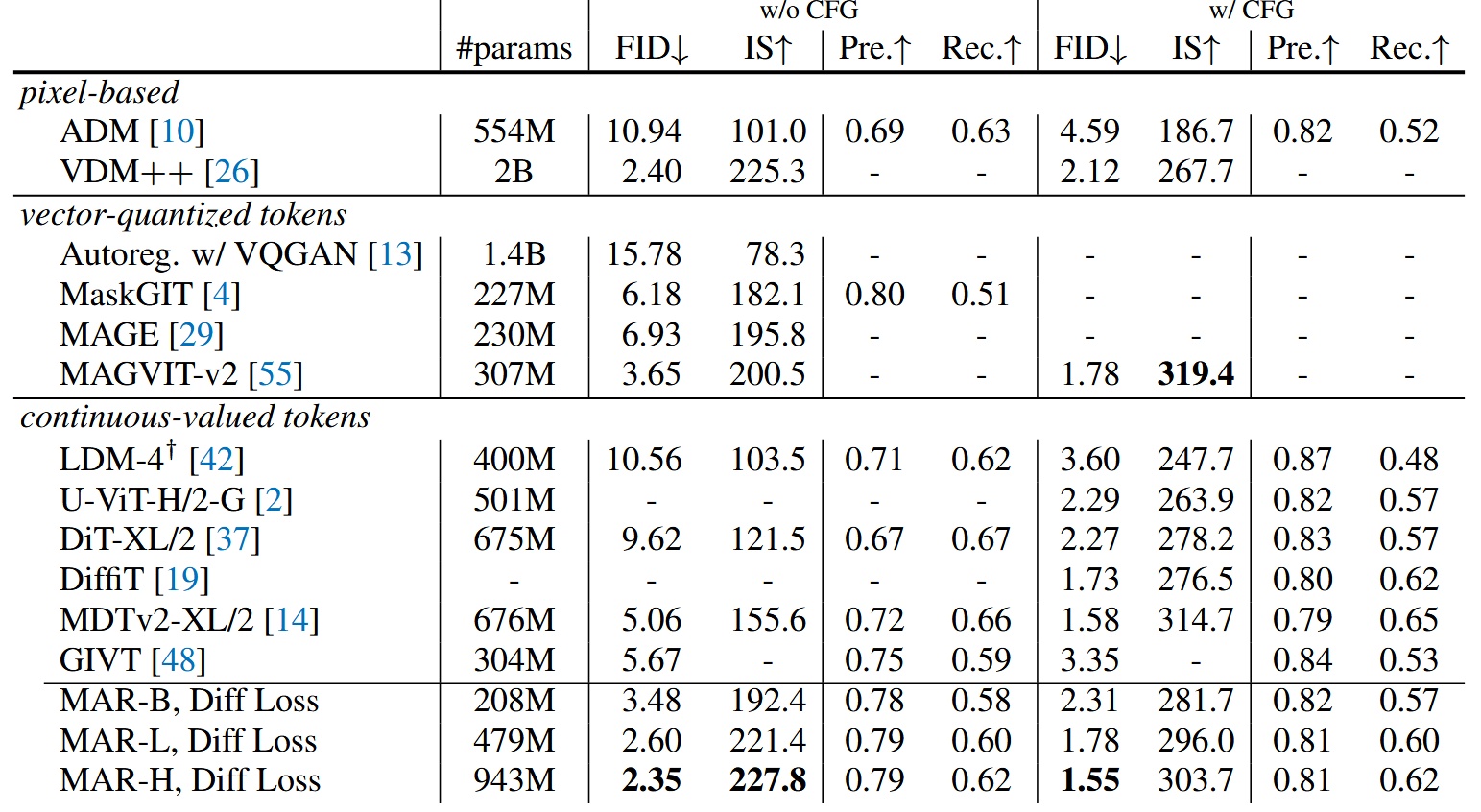
System-level comparison
與其他模型的比較,最大的模型 MAR-H 才能獲得最好的表現,但 MAR-L 表現也已經不錯
結論
總的來說,本作打破了自迴歸圖片生成模型的舊有做法,以結合 Diffusion 和 MAE 開闢出新的方向,而且只使用了最簡單的 DDPM 來作展示,若改用更好的擴散模型肯定能獲得更好的結果,期待後續有更多衍生作品
最後放上一部份模型產生出來的圖
