[19.05] VA-FAS

聲波裡的臉
Multi-Modal Face Authentication using Deep Visual and Acoustic Features
這篇論文中,作者沒有幫自己的方法取個簡潔的名字,所以我們擷取 Visual 和 Acoustic 的特色,就叫它 VA-FAS 吧。
定義問題
智慧型手機早已把「看臉」寫進日常開機序曲。
為防止照片騙過鏡頭,主流方案在影像流中捕捉眨眼、嘴型、頭部微動等時間線索;或是偵測影像中的異常的空間線索等,來判斷使用者是否為真。
看起來好像沒有問題,但實際上,如果攻擊者使用高解析度影片,這些時間和空間的線索就會變得不堪一擊。
當單純的 RGB 線索撐不起安全邊界,產業走向了第二條路:在鏡頭旁塞進更多感測器。
像 iPhone 的 Face ID 利用近紅外線結構光重建 3D 幾何,確實把攻擊門檻拉高;部分旗艦 Android 手機也開始附加 ToF 或雙目模組。
但這套「硬體補強」策略,可能會碰到三個困難點:
- 成本:專用模組抬高 BOM,難以下放到中階/低階裝置。
- 空間:前鏡頭區域寸土寸金,多一顆感測器就少一分螢幕。
- 生態綁定:感測器規格與演算法深度耦合,跨平台複製困難。
回到大多數手機仍僅配備單一前鏡頭與麥克風的世界,RGB 活體的漏洞依舊敞開。
我們還需要第三條路:在不新增硬體的前提下,為臉部辨識注入立體感。
於是,作者把目光轉向了聲波:
那些一直存在、卻從未被正眼看待的反射訊號。
聲音能否為二維影像補上一層深度?影像與聲波的結合,又是否真的能堵住影片攻擊的缺口?
解決問題
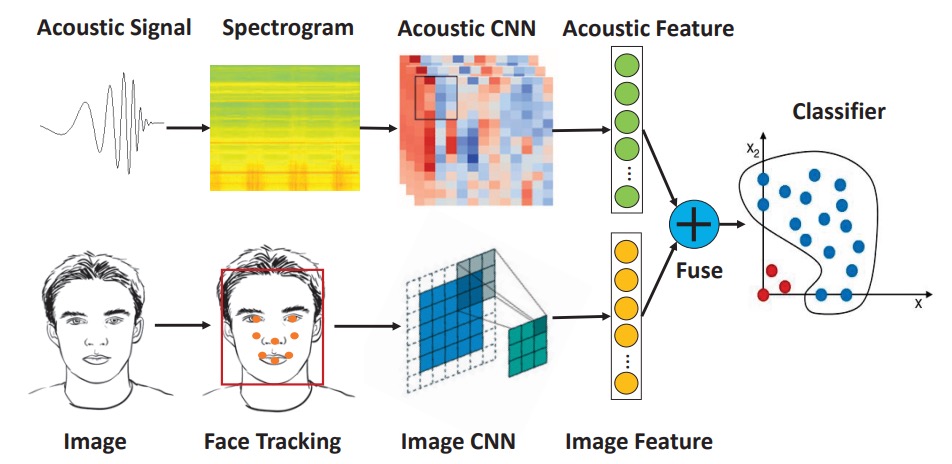
作者提出聲學與視覺融合的臉部認證系統,無需新增硬體,即可提升手機上的活體驗證強度。
整體系統可分為三個模組:
- 聲波特徵擷取
- 影像特徵擷取
- 多模態特徵融合與分類
聲學與影像特徵分別經過 CNN 擷取,串接為聯合向量後,由 One-Class SVM 判斷結果。
整體架構非常簡單,我們來看看每個模組的細節。
聲波特徵擷取
作者選擇使用手機內建的「聽筒喇叭 + 上方麥克風」作為聲波通訊對,這套配置廣泛存在於各型手機中,與前鏡頭共置,能降低聲波與影像感測之間的對位誤差。
所發送的聲波為 16–22 kHz 線性升頻 chirp,屬於近乎不可聽範圍。其屬於 FMCW(Frequency-Modulated Continuous Wave) 類型,能透過頻率差估算反射路徑長度。
為提升訊號品質,系統進行以下設計:
- 使用短脈衝以避免揚聲器自我干擾;
- 施加 Hanning window 以柔化訊號邊緣,提升時頻穩定性。
聲波處理流程如下:
錄得訊號先通過 Butterworth band-pass filter(16–22 kHz)去除背景雜訊。
處理後的波形可觀察到:
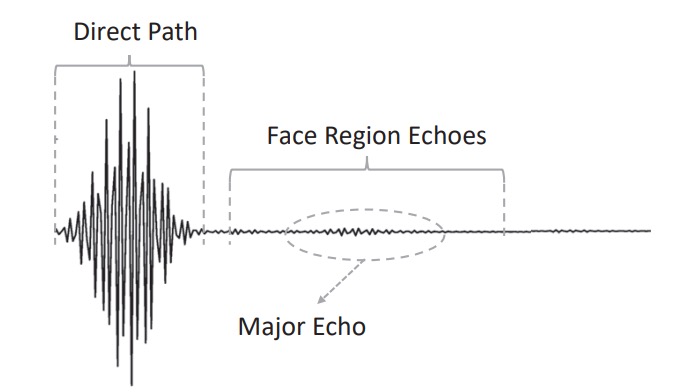
- 直達徑:直接從喇叭送至麥克風,通常為最高幅值;
- 臉部回波:經額頭、鼻樑、臉頰等反射回來的主體信號;
- 雜訊與干擾反射:來自桌面、衣領等處,需被排除。
分段策略如下:
- 利用峰值偵測法定位直達徑;
- 再以交叉相關(cross-correlation)配合註冊階段的模板訊號,鎖定主回波區段。
若多個相似波峰造成定位不穩,則引入前鏡頭估測的臉距資訊縮小搜尋範圍:例如雙眼間距在影像中變寬,表示臉部靠近,則可下修預期回波位置。
最終擷取的區段會額外延伸左右各 10 個採樣點,以保留約 7 公分深度範圍。
而回波訊號需要再經過一次 FMCW 距離轉換,如下示意圖:
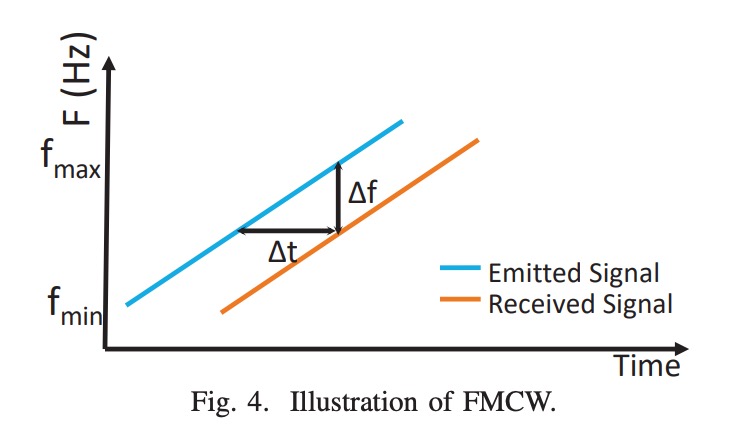
FMCW 技術將時間延遲轉換為頻率偏移,反射距離由下式決定:
其中:
- :距離;
- :音速;
- :接收與發射訊號的頻率差;
- :chirp 時長;
- :頻寬(6 kHz)。
經「訊號混頻」後取得的頻率差,會轉換成一組時頻圖(spectrogram)。
我們把時頻圖送入一個預訓練的 CNN(基於 EchoPrint 架構)進行推論,並去除最後分類層,以 128 維向量形式輸出,即可代表了一張臉在聲波空間中的結構回聲圖譜。
影像特徵擷取
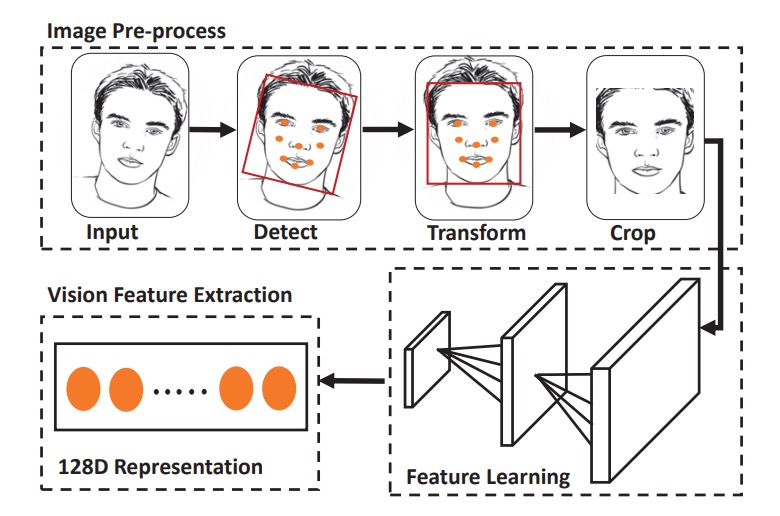
完成聲波特徵擷取後,接下來是影像特徵擷取,包含四個步驟:
- 臉部偵測:利用 HOG + 預訓練模型,偵測臉框與五官;
- 仿射轉換:將五官座標對齊至標準模板。
- 裁切並縮放:取得定長輸入圖;
- 資料增強:包括亮度正規化與角度修正。
特徵抽取的部分則是採用精簡版 OpenFace(源自 FaceNet 的 nn4),搭配 classification loss + triplet loss 訓練,最後輸出 128 維影像特徵向量。
特徵拼接
兩個特徵向量簡單拼接,構成最終 256 維聯合特徵:
分類器採用 One-Class SVM,僅用註冊樣本建立一個高維邊界,將他人視為異常資料。這樣做的優點是不需蒐集攻擊樣本,計算輕量,適合部署於邊緣裝置。
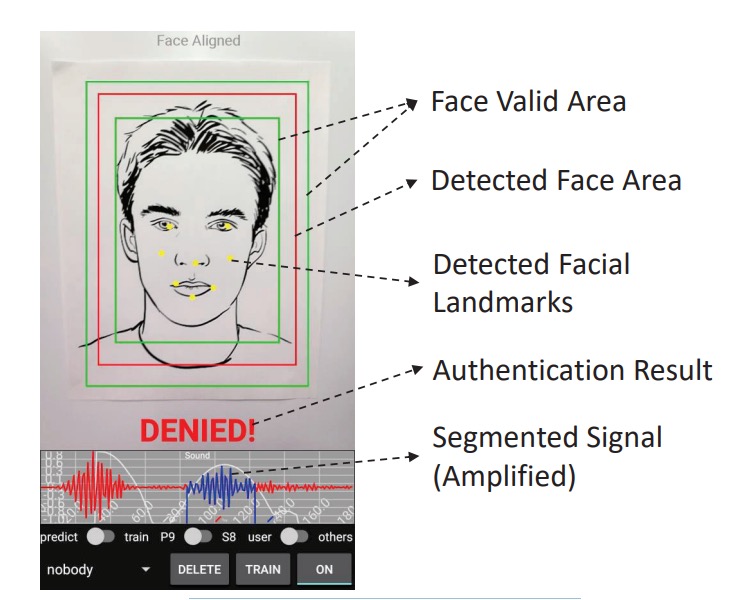
最終系統如下圖所示,只需將臉對準紅框,系統便會同步播放 chirp 並擷取影像,於 300 毫秒內完成判定。
討論
資料與實驗設計
-
受測者:10 位志願者(不含於聲波模型訓練集中);
-
聲波樣本:每人約 2 分鐘錄音,共收集 13,806 筆;
-
影像樣本:每人 20 張臉部照片,並以鄰近影像補差對齊數量;
-
攻擊樣本:5 種假臉類型,包括:
- 紙本照片、螢幕顯示、紙盒表面、牆貼與雕像
資料皆取自非受控環境,涵蓋多種光源與背景雜訊,以測試系統實用性。
模型效能以四項指標衡量:
其中:
- Precision 高 → 表示誤放行少;
- Recall 高 → 表示真用戶不易被拒;
- F1 與 BAC 用來綜合評估整體表現。
資料以 8:2 比例切分訓測集。 模型採用 One-Class SVM,每位使用者僅用自身樣本訓練,再以「其他人 + 攻擊樣本」作為負樣本測試;每組模態(聲波、影像、聯合)皆重複相同流程,以確保比較公平。
雙模態驗證效能
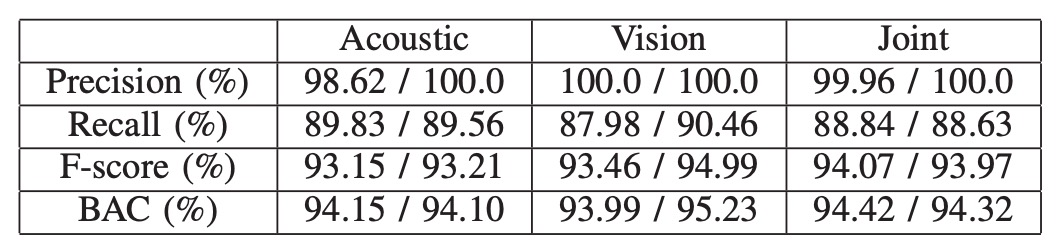
基於雙模態的架構,實驗結果如上表,左邊數值為平均,右邊為中位數。
在所有測試中,聯合特徵(acoustic + visual)始終展現出比單一模態更穩定的驗證表現。
這主要歸功於視覺模組使用了經 triplet loss 訓練的深度嵌入特徵,能有效拉開同類與異類之間的分佈界線。這種視覺辨識強度在遇到照片或影片等圖像攻擊時仍可能迅速失效。此時,聲波特徵便能補足視覺的盲點,讓聯合模態成為唯一能抵擋攻擊的選項。
在所有測試中,甚至包括一組同卵雙胞胎樣本,聯合模態模型亦成功區分兩人,未產生誤判。雖然目前僅測試單一雙胞胎樣本,結果仍具有初步指標性,即便生理外觀極度相似,聲波反射的細微差異依舊可被模型捕捉。
背景雜訊影響
聲波模組的實用性,取決於它是否能在真實環境中穩定運作。為此,作者在嘈雜實驗室與人聲交談的教室環境下,重複進行資料收集與辨識測試。
結果顯示,在這些常見背景雜訊條件下,模型辨識效能並無明顯下降。這代表系統所設計的 chirp 頻段(16–22kHz)與濾波機制,足以避開語音與環境噪訊的干擾,具備實際應用的穩定性。
結論
這篇論文屬於很早期開始思考「聲波作為活體線索」的實作探索之一,並且在當時的硬體條件下,提出了一個可行的解決方案。
沒有過度依賴新硬體,也沒有預設更理想的資料條件。
只有工程現實,以及對資源極限下的一種反問:
如果手機只有麥克風、喇叭與前鏡頭,我們還剩下多少空間可以防守?
本研究試著給出的回答:聲波裡的臉,夠用。