[20.07] STDN

偽裝的痕跡
On Disentangling Spoof Trace for Generic Face Anti-Spoofing
模型告訴我們,這是假的。但是它卻說不出為什麼。
這種模型,你敢信?
定義問題
Face Anti-Spoofing(FAS)作為生物辨識系統的第一道防線,其研究歷史已有十餘年。
從早期的眼動偵測、頭部微動,到近年的 CNN 判別器與深度監督學習,模型的準確率看似越來越高。但在面對未知攻擊手法、不同裝置與光源條件下,泛化能力卻還是一道難以逾越的牆。
問題並不在於模型是否能「學會分辨真假」,而是它究竟學會了什麼?
它真的有看到假象本身的痕跡嗎?
還是說,它只學會了在某種資料集上區分解析度、色彩飽和度或裁切位置?
尤其當我們將不同攻擊方式(照片、螢幕、面具、化妝)一視同仁,嘗試建立通用的 FAS 系統時,我們才真正意識到:現有方法多數依賴「黑箱判斷」:給定一張臉,輸出一個分數。
但這樣的分數,無法說明模型是根據什麼做出的選擇。事實上,我們連讓模型說出「這是假的」的理由都做不到。
也因此,人們難以信任模型的決策,也無法推進它的訓練策略。因為我們無法觀察模型的判斷依據,我們就無法真正理解它與假象之間的邊界。
這篇論文的作者說:我們不要再問模型真假了,我們應該要問的是:
在這張臉上,你看到了什麼,讓你覺得它不是活的?
解決問題
在傳統二分類任務中,模型給出的是一個「真假分數」,但它無法回答:你到底看出了什麼?
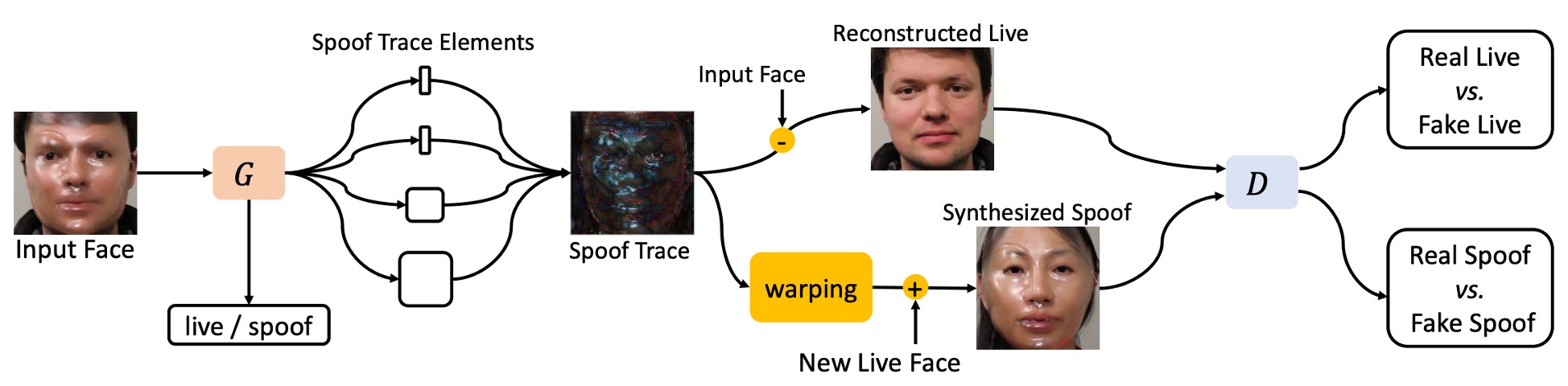
作者在此提出了另外一種思路,稱為 Spoof Trace Disentanglement Network(STDN)。
設計概念如上圖,模型先從一張輸入人臉中,抽取出潛藏的「假痕跡(spoof trace)」,再進行:
- 重建(Reconstructed Live):將假臉還原為活體版本。
- 合成(Synthesized Spoof):將假痕跡轉嫁到另一張真臉上,製造新的攻擊樣本。
這種方式使 spoof trace 不再是隱性的判斷依據,而是顯性的、可操控的可視變數,成為整個系統的中樞訊號。
這篇論文的方法論略為複雜,包含了多個模組與步驟。讀者可能需要多點耐心,才能理解作者的設計邏輯。
Spoof Trace
設輸入影像為 ,其所屬可能為 spoof 域 或 live 域 。
目標是找到對應於 live 域的影像 ,並使兩者之間的差異最小:
此處 表示 Frobenius norm。
根據定義,spoof trace 可表示為:
若 本身來自 live 域,則理論上 應該為零,而對 spoof 圖像而言, 即為其視覺上的偽造殘差。
為了提升 spoof trace 的解釋力與合成能力,作者依據過去的研究文獻將其進一步拆解為以下四種層次成分:
- Color range bias:,控制像素強度範圍的調整;
- Color balance bias:,調整通道間顏色平衡;
- Smooth content pattern:,平滑紋理,需上採樣;
- High-frequency texture:,包含摩爾紋與邊緣輪廓等細節。
這些元素共同構成 spoof trace 的建構函數:
其中 表示將 上採樣(resizing)至與 相同的空間解析度。
透過上述定義,STDN 將 spoof trace 從隱性的分類依據轉化為顯性的中介變數,使模型不僅能區分真假,還能指出「假在哪裡」。
這樣的建模帶來三個核心優勢:
- 可視化與可解釋性:模型輸出 spoof trace,可作為判斷依據的可視證據;
- 合成與資料擴增能力:trace 可套用於其他影像以生成 spoof 範例;
- 泛化能力提升:避免模型依賴非 spoof 本質的因素如光照、背景等。
最主要的目的是要把 spoof trace 在於送進 GAN 模型進行合成,讓模型能夠學會如何生成 spoof 圖像。
解耦生成
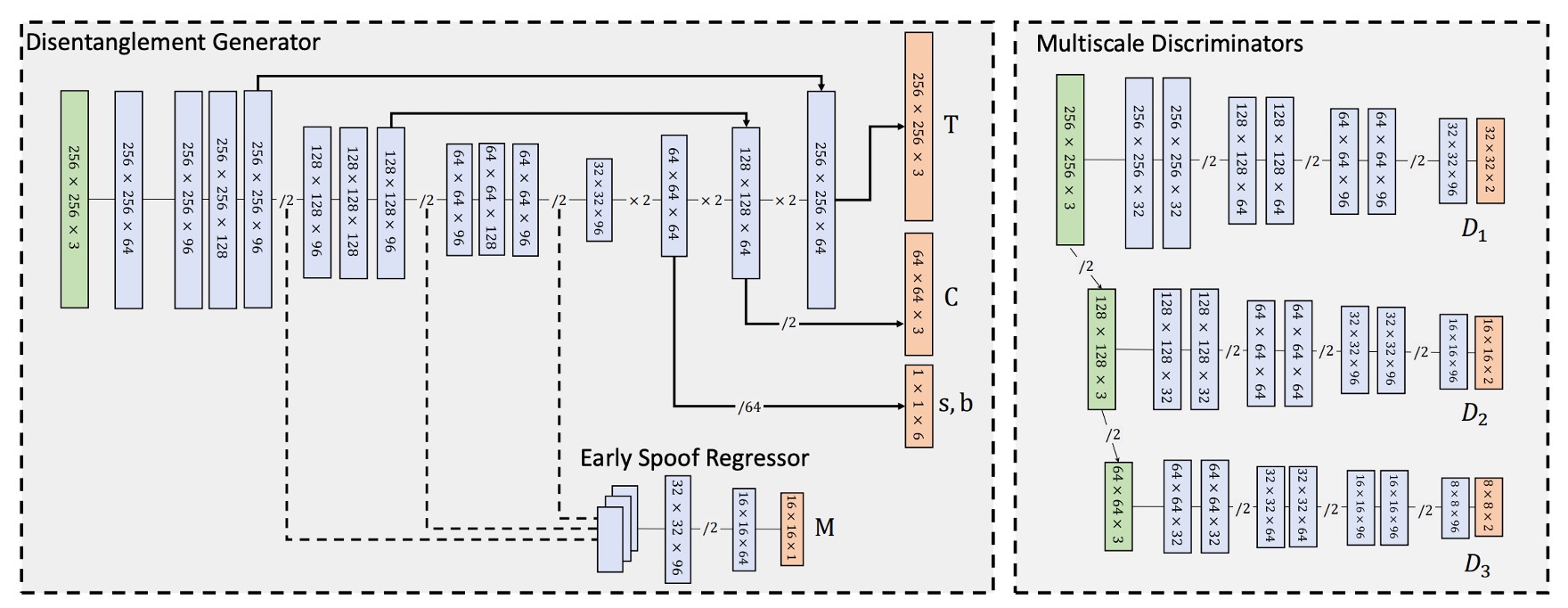
STDN 中的 spoof trace 解耦,是透過一組基於 Encoder–Decoder 架構的生成器所實現,其任務是從輸入影像中逐層析出 spoof trace 的各項構成分量 。
其架構參考上圖,輸入影像 首先進入 Encoder,經過一系列卷積層進行逐層下採樣,最終產生一個潛在表示張量:
該潛在特徵將成為 Decoder 解耦 spoof trace 的基礎。
Decoder 則透過一系列轉置卷積層(Transpose Conv)逐層上採樣,並依據不同空間解析度,逐步生成 spoof trace 的各元素:
- 顏色偏移項 :為全圖單一值張量,解析度最低,因此於 Decoder 最初階段即被解耦。
- 低頻紋理 :在中層解碼階段產生,解析度約為 ,再經上採樣應用於合成過程。
- 高頻紋理 :於 Decoder 最末層輸出,保持與輸入影像相同解析度 。
這種 coarse-to-fine 解耦設計,配合每層 spoof 特徵的空間性質,使得整體 spoof trace 表徵具備清晰的語義分離性與生成對應性。
此外,為保留高頻細節並提升合成品質,生成器亦參考 U-Net 架構,在 Encoder 與 Decoder 對應層之間加入 skip connection,實現局部紋理資訊的直接傳遞。
雙域輸入策略
有別於典型的 GAN 模型僅對 source domain(如 spoof)進行生成訓練,本方法中生成器接受來自兩個 domain 的輸入影像:
- spoof domain:提供正樣本 trace;
- live domain:提供對照,並期望其 spoof trace 近似零。
這樣的設計促進模型從活體與偽造影像中學習辨別性強、語義清晰的 spoof trace,並避免 trace 本身對分類造成偏移。
然而,由於 spoof trace 的強度與型態會依 spoof 類型(如照片、面具、化妝)有所不同,trace 本身並非完美的分類依據。因此,作者額外引入一個 Early Spoof Regressor(ESR),強化生成器在潛在空間中的判別能力。
Early Spoof Regressor
ESR 模組設計如下:
- 輸入為 bottleneck 特徵張量 ;
- 輸出為一張 spoof probability map ,其值域為 1,分別對應 live 與 spoof。
這張 spoof map 被視為對輸入影像的「空間性判斷」,使得生成器不僅生成 trace,亦能進行初步分類。
為配合此設計,整體生成器在架構上採取「重 encoder、輕 decoder」策略,即 encoder 採用更多 channel 與 deeper block,讓 ESR 得以充分利用編碼器所學之 spoof 表徵。
測試階段之分類策略
在測試階段,最終的 spoof 分數由兩部分組成:
- ESR 輸出之 spoof map 的 L1 強度平均;
- Spoof trace 的整體強度平均(以 L1 範數衡量);
其計算公式如下:
其中:
- :ESR 輸出 map 的空間解析度;
- :輸入影像之空間解析度;
- :調節 spoof trace 對最終分數的影響程度的超參數。
這種雙指標融合的分類策略,有助於提升模型對 spoof 強弱程度的敏感性,亦能在 spoof trace 與 ESR 判斷產生差異時提供緩衝區間。
重建與合成
在完成 spoof trace 解耦後,STDN 不僅能用於分類判斷,亦能將這些 trace 作為結構性的訊號,導入於兩類任務:
- 重建(Reconstruction):從 spoof 影像中扣除 trace,還原其對應之活體影像。
- 合成(Synthesis):將某張 spoof 影像中抽離出的 trace,轉移至任意 live 臉上,產生合成的 spoof 攻擊樣本。
首先看活體影像重建任務:
給定輸入影像 ,其對應 spoof trace 為 ,STDN 可透過以下運算進行活體還原:
此處的 被視為輸入影像在活體域 的最小變化對應版本。
此操作不僅能作為 trace 解耦品質之視覺評估依據,更能在訓練過程中用以增強 spoof trace 的可逆性與語義一致性。
另外是偽造影像合成到部份:
為了實現資料擴充與 spoof 多樣性模擬,STDN 提供了將 spoof trace 遷移至另一張 live 臉的能力。設有兩張影像:
- :來源 spoof 影像,其 trace 為
- :目標 live 影像
則其合成 spoof 影像可表達為:
這裡讓我們想到近年在 LLM 領域中流行的 Model Merging 的技術,也是把附加上原始模型上的不同功能視為一組「向量」參數,然後進行任意的加減法,來達到擴充模型的效果。
如果我們把特定型態攻擊的 「spoof trace」 也視為一組向量參數,然後進行加減法的話,那我們或許就能透過組合這些向量,來讓模型學會應對不同的攻擊型態。
但此處存在一項挑戰:spoof trace 中可能包含與原始臉部幾何結構高度相關的區域性紋理(如面具邊緣、皺褶等),直接套用於不同臉型與姿勢的影像上,會造成明顯的幾何失真與視覺不一致。
為解決此問題,作者提出一套可微分的 即時 3D 幾何扭曲層(Online 3D Warping Layer),用以對 spoof trace 進行對位調整。
幾何扭曲層
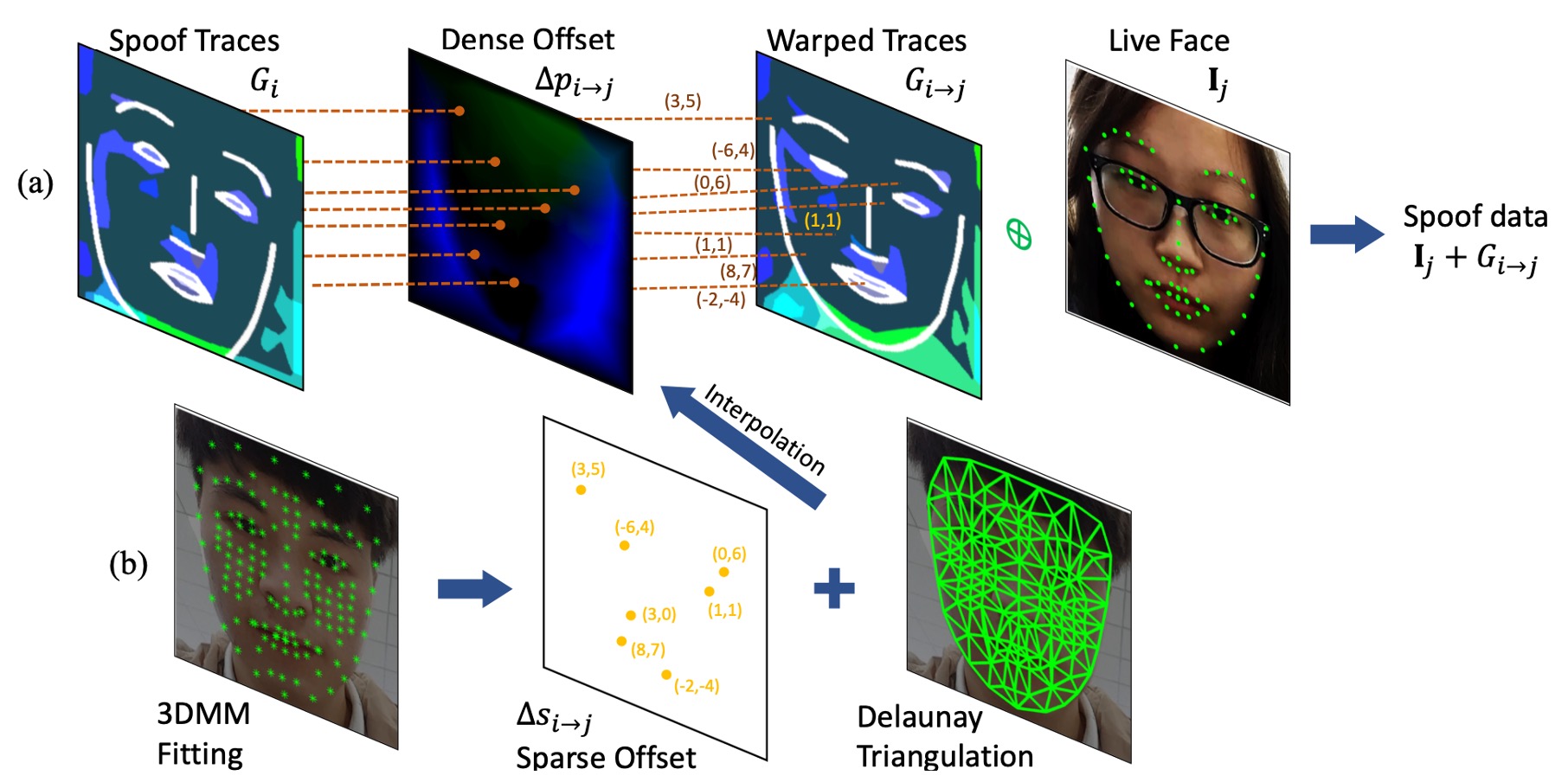
該模組基於 3D Morphable Model(3DMM)建立臉部對應點集合,並透過 Delaunay triangulation 進行稀疏到密集場的幾何轉換。
步驟如下:
-
spoof trace 評估 對來源影像 ,其 spoof trace 定義為:
其中 為原始像素座標格。
-
計算 dense offset 若欲將 spoof trace 應用至 ,需計算密集場偏移量 ,最終 warped trace 表示為:
其中偏移量通常為非整數,故採用 bilinear interpolation 實作位置對應。
-
由稀疏點轉換至密集場 擬合每張人臉之 3DMM,並擷取 個代表性頂點的 2D 投影位置:
接著可計算來源與目標影像之間的稀疏偏移:
-
三角形內插轉換至 dense offset 應用 Delaunay triangulation 插值:
該操作以每個像素所處三角形為基底,線性加權三個頂點的位移,實現 dense offset 的高效建構與可微性。整體 warping 操作可端到端併入訓練流程。
操控 Spoof Trace
spoof trace 的結構性使其具備可操作性。
作者藉此提出一種訓練資料強化策略:
在合成 spoof 影像時,隨機移除 spoof trace 中的某一項元素 ,以模擬 spoof 強度較低的樣本,作為 harder example 用於訓練。
此策略的理論基礎在於:某些 spoof 特徵可能在實務應用中極為微弱或被掩蓋,若模型僅依賴單一強特徵,則會對這類樣本失效。藉由隨機移除部分 trace 元素,可迫使模型學習更為多樣且全面的 spoof 表徵。
相較於傳統的 brightness/blur 操作或人為扭曲,本方法可直接操控語義明確的 spoof element,生成更真實、具結構意涵的合成資料,並在實驗中顯示優於傳統資料增強法的效益。
多尺度判別器
在 STDN 的設計中,生成器的目標不僅是產出合理的 spoof trace,更需保證由 trace 推導出的合成樣本(reconstructed live 或 synthesized spoof)在視覺品質與語義層次上皆具可信度。
為此,作者設計了三個不同解析度下的 PatchGAN 判別器,以涵蓋從高頻紋理到全局構型的多尺度資訊。
所使用的三個判別器分別為:
- :接收原始解析度影像(),專注於高頻紋理特徵(對應 spoof trace 中的 )。
- :接收下採樣一半的影像(),強調中頻結構與平滑紋理(對應 spoof trace 中的 )。
- :接收下採樣四分之一的影像(),專注於低頻全域偏移與色彩平衡(對應 spoof trace 中的 )。
這種分層辨識策略可有效提升模型對於 spoof trace 四個子成分的整體一致性與交叉校驗能力,形成解耦 → 重建 → 合成 → 判別的完整循環。
判別器架構細節如下:
每一個 判別器皆採用 PatchGAN 結構,即純粹由卷積層堆疊而成的 FCN。該架構已被證實在圖像生成與 FAS 任務中均具備良好性能。
具體配置如下:
-
每個判別器包含:
- 7 層卷積層(含非線性激活與 BatchNorm);
- 3 層下採樣操作(stride = 2);
-
輸出為一張 2-channel 的 response map,形狀為 ,每個位置對應一個判別 patch,2 個 channel 各代表對應一個 domain 的輸出信心分數。
這裡的 2-channel 輸出設計別具意義:
- 第一通道(Channel 1):將「重建之 live 影像(reconstructed live)」與「真實 live 影像」進行對比,驗證 spoof trace 扣除後的真實性;
- 第二通道(Channel 2):將「合成之 spoof 影像(synthesized spoof)」與「真實 spoof 影像」進行對比,評估 spoof trace 添加後的可信度與攻擊性。
這種雙向監督能同時驅動生成器在「還原」與「造假」兩端提升品質,並強化 spoof trace 的語義一致性與重建可逆性。
損失函數
STDN 的訓練採用多任務學習架構,包含 五類損失函數 與 三個訓練步驟(Steps),以協同驅動生成器與多尺度判別器學習 spoof trace 的分離、可逆性與可視性。
-
1. ESR 損失(Early Spoof Regressor Loss)
對於 ESR 所輸出的 spoof map ,期望其對於活體影像輸出全為 0,對於 spoof 影像(包括合成的 spoof)輸出全為 1。為此,採用 L1 損失定義如下:
其中:
- :spoof map 的解析度;
- :由生成器合成出的 spoof domain;
- :L1 向量範數。
-
2. 生成器對抗損失(Generator Adversarial Loss)
為訓練生成器使 reconstructed live 與 synthesized spoof 分別逼近其所屬真實 domain,採用 Least Squares GAN(LSGAN)損失形式,對於三個尺度的判別器 ,其損失定義如下:
其中:
- :第 個判別器之 live domain 輸出通道;
- :第 個判別器之 spoof domain 輸出通道。
-
3. 判別器對抗損失(Discriminator Adversarial Loss)
判別器需正確分辨真實樣本與由生成器合成之樣本,其損失函數如下:
-
4. Trace 正規化損失(Trace Regularizer Loss)
為強化 spoof trace 的語義性並抑制活體樣本中無意義的 trace 殘留,加入 L2 正規化項:
其中 控制活體 trace 壓縮力度。
-
5. 像素級監督損失(Supervised Pixel Loss)
由於合成 spoof 具有明確的 spoof trace 來源,因此可對生成器進行像素級監督學習。為避免誤導梯度,使用 stop-gradient 操作鎖定參考 trace:
該損失可迫使生成器學會正確提取 spoof trace 結構,而非重複學習輸入內容。
訓練流程設計
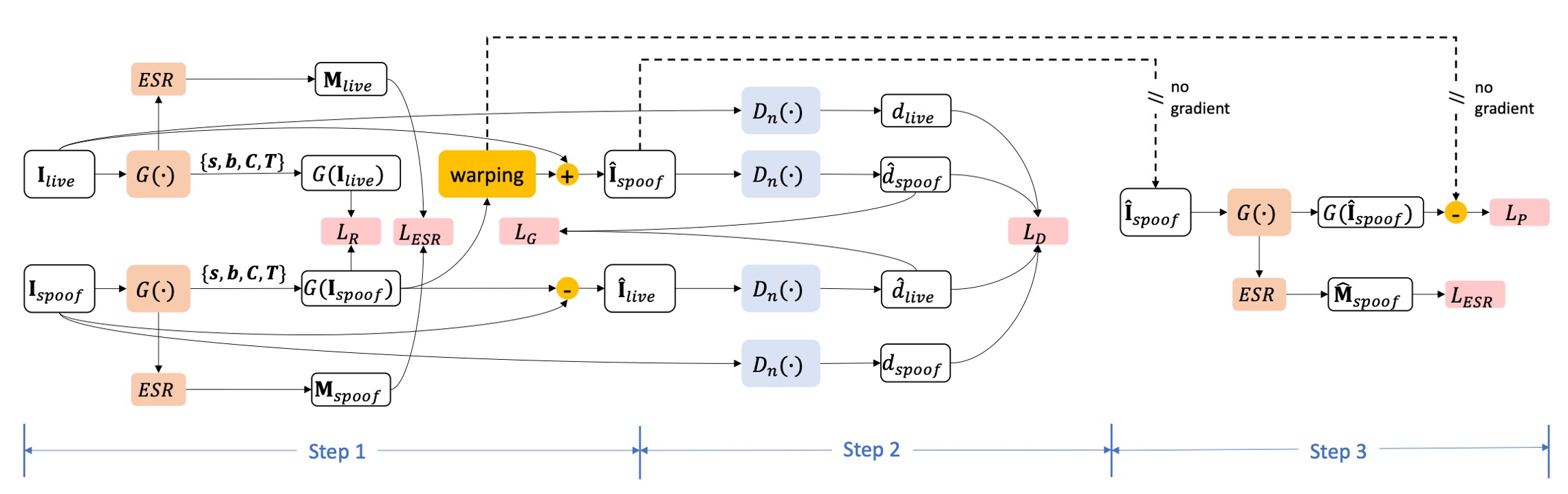
如上圖所示,STDN 的訓練採用多任務協同優化機制,每一個 mini-batch 包含三個互補的子步驟,分別針對生成器、判別器與 trace 解耦 supervision 進行參數更新。
以下為各階段細節說明:
-
1. Generator Step
在此步驟中,將活體人臉 與 spoof 攻擊樣本 輸入生成器進行 spoof trace 的解耦操作。模型分別進行兩項生成任務:
- 重建活體影像:使用 還原其對應的活體版本 ;
- 合成 spoof 影像:將 spoof trace 套用至另一張 live 臉 上,得到合成 spoof 影像 。
生成器的更新目標由三項損失組成:
- :對抗損失(推進合成樣本逼近真實 domain);
- :早期 spoof 判別監督;
- :trace 強度正則化。
總損失如下:
-
2. Discriminator Step
接續使用同一批次樣本,將下列影像傳入三個多尺度判別器 ,以學習區分真實與合成 domain:
- 原始活體樣本
- 原始 spoof 樣本
- 重建樣本
- 合成 spoof
每一個尺度的判別器都需學習:
- 在第一通道 中判別真實 live vs. 重建 live;
- 在第二通道 中判別真實 spoof vs. 合成 spoof。
判別器之對抗損失定義為:
由於對抗訓練易產生不穩定性,此步驟的學習率會設定為其他步驟的一半,以平衡梯度強度與穩定訓練過程。
-
3. Extra Supervision Step
此階段引入 spoof trace 的「合成可監督性」,以強化生成器對 spoof trace 結構的正確辨識與解耦能力。
輸入資料為:
- 原始 live 臉
- 對應 spoof trace 合成影像
- 由來源 spoof trace 得到的「ground-truth trace」
此步驟僅更新生成器參數,目標損失如下:
- :進一步監督 spoof 判別準確度;
- :像素級 spoof trace 解耦誤差(使用 stop-gradient 固定目標 trace)。
綜合損失表示為:
提示為維持 Batch Normalization 的統計穩定性,此步驟會將 與 成對輸入,以維持 batch 資料分布的均衡性。
討論
由於方法論已經佔據的大量的篇幅,我們最後挑幾個重點來進行討論。
已知攻擊偵測
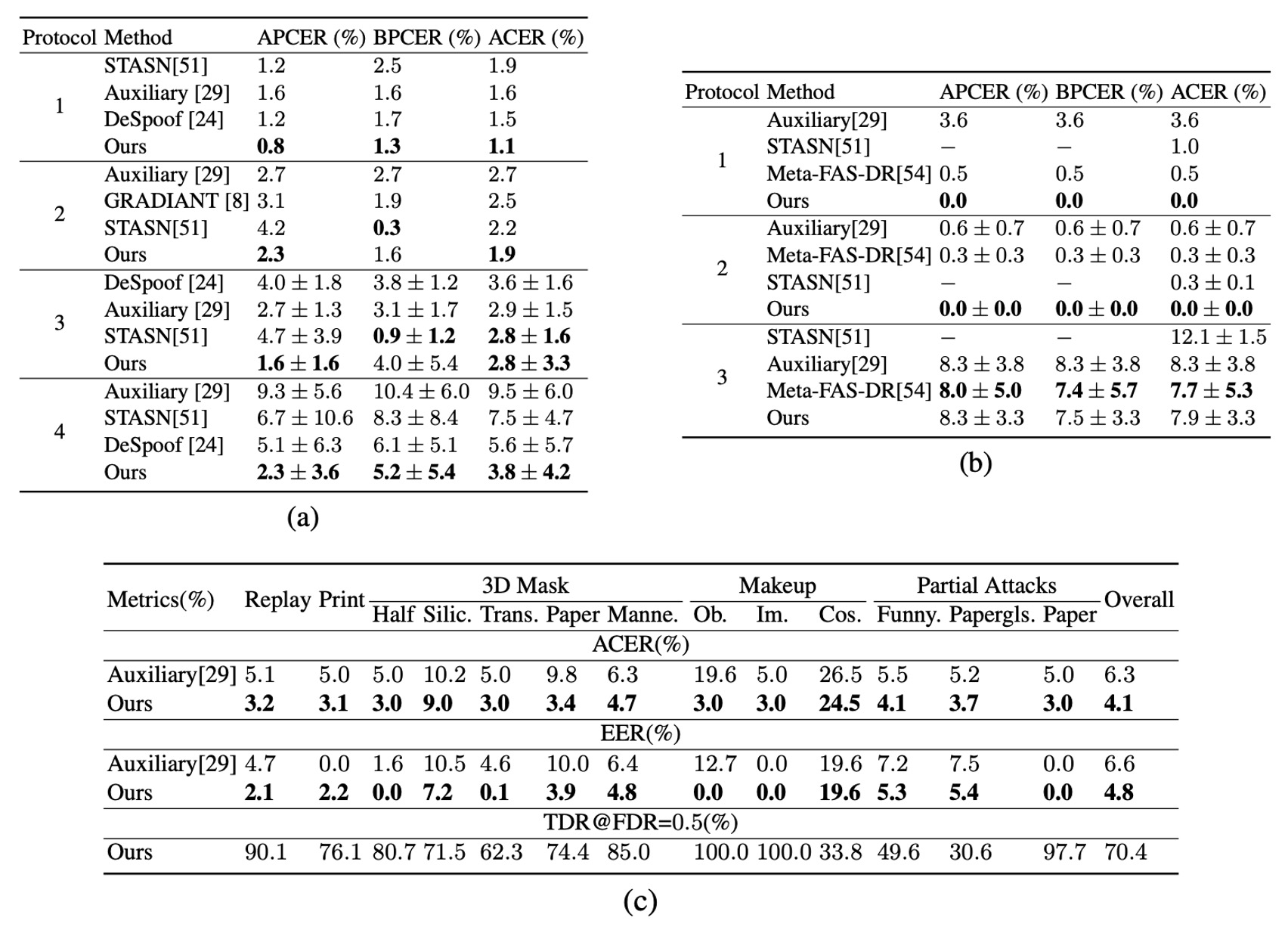
從上表 (a)(b)(c) 可觀察到,STDN 在 OULU-NPU 與 SiW 的多項協定(protocol)中,均展現了與現有方法相當或更優的偵測能力,特別是在 OULU-NPU 協定 1、4 中,ACER 降幅達 30% 與 32%(相較最優先前方法)。
在多種印刷與重播攻擊下,STDN 的活體重建及 spoof trace 提取機制提供了穩定的判斷依據。對於 SiW-M 的 13 種攻擊類型,實驗也顯示在大多數 spoof 類型上,STDN 皆優於先前工作,證實在多樣化攻擊場景下的泛用性。
未知攻擊(Unknown Spoof)偵測
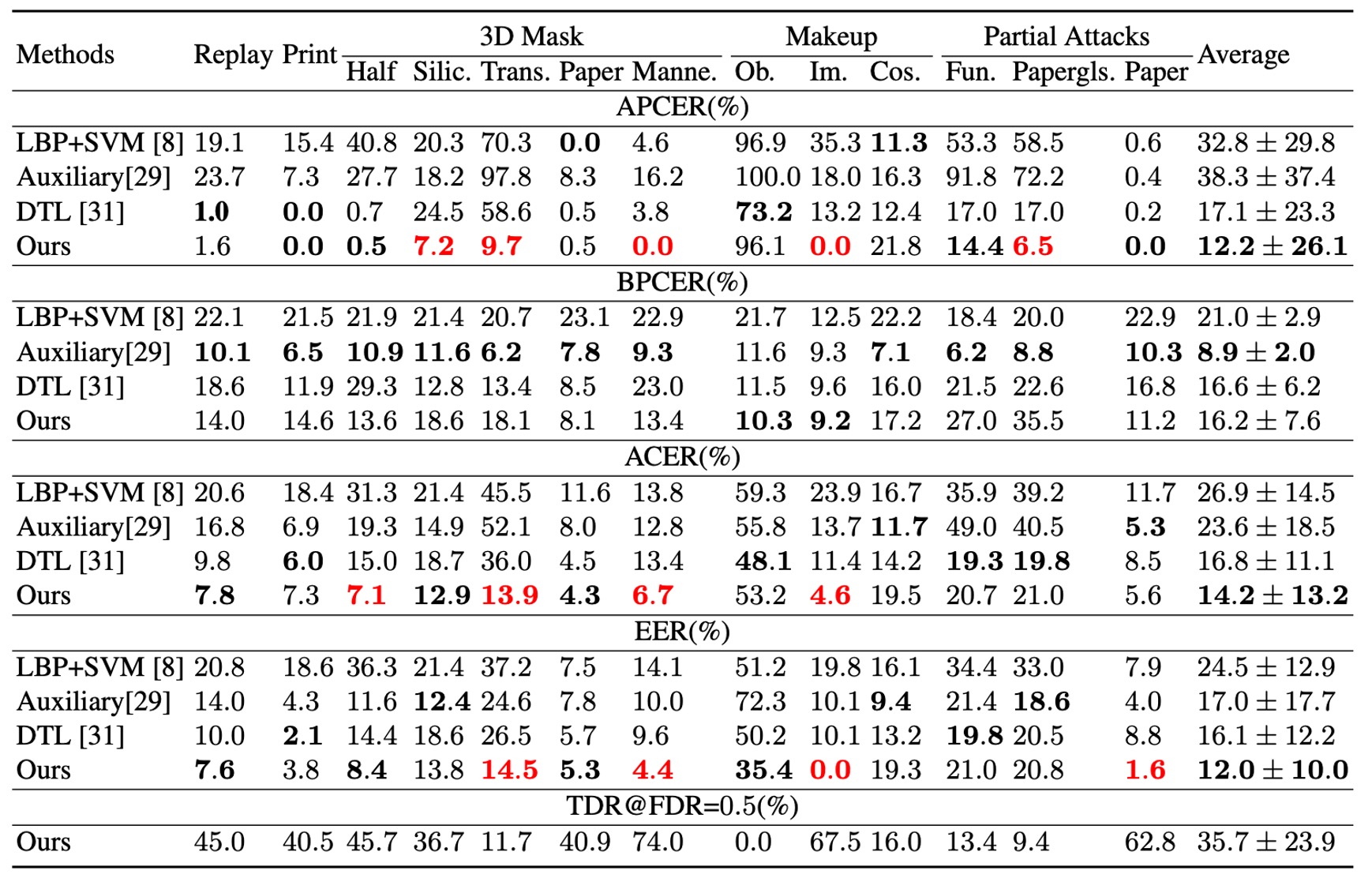
如上表所示,STDN 在未知攻擊之整體 EER 與 ACER 上,分別較原本最佳模型取得更好的表現。
雖然某些攻擊(如透明面具、紙質面具等)仍具挑戰性,但當取得少量樣本後,STDN 能藉由顯式解耦出的 spoof trace,快速鎖定關鍵區域並提升辨識效能。
這顯示透過 trace 建模,系統能在未知攻擊場景中依然保持一定的適應性。
Spoof Trace 的可視化與評估
-
Spoof Medium Classification

將解耦出的 spoof trace 單獨用於偵測不同假臉媒材時,辨識精度高於直接使用原始影像,代表 trace 中確實蘊含了足以區分各種偽造材質的關鍵紋理或色彩線索。
-
視覺化分解
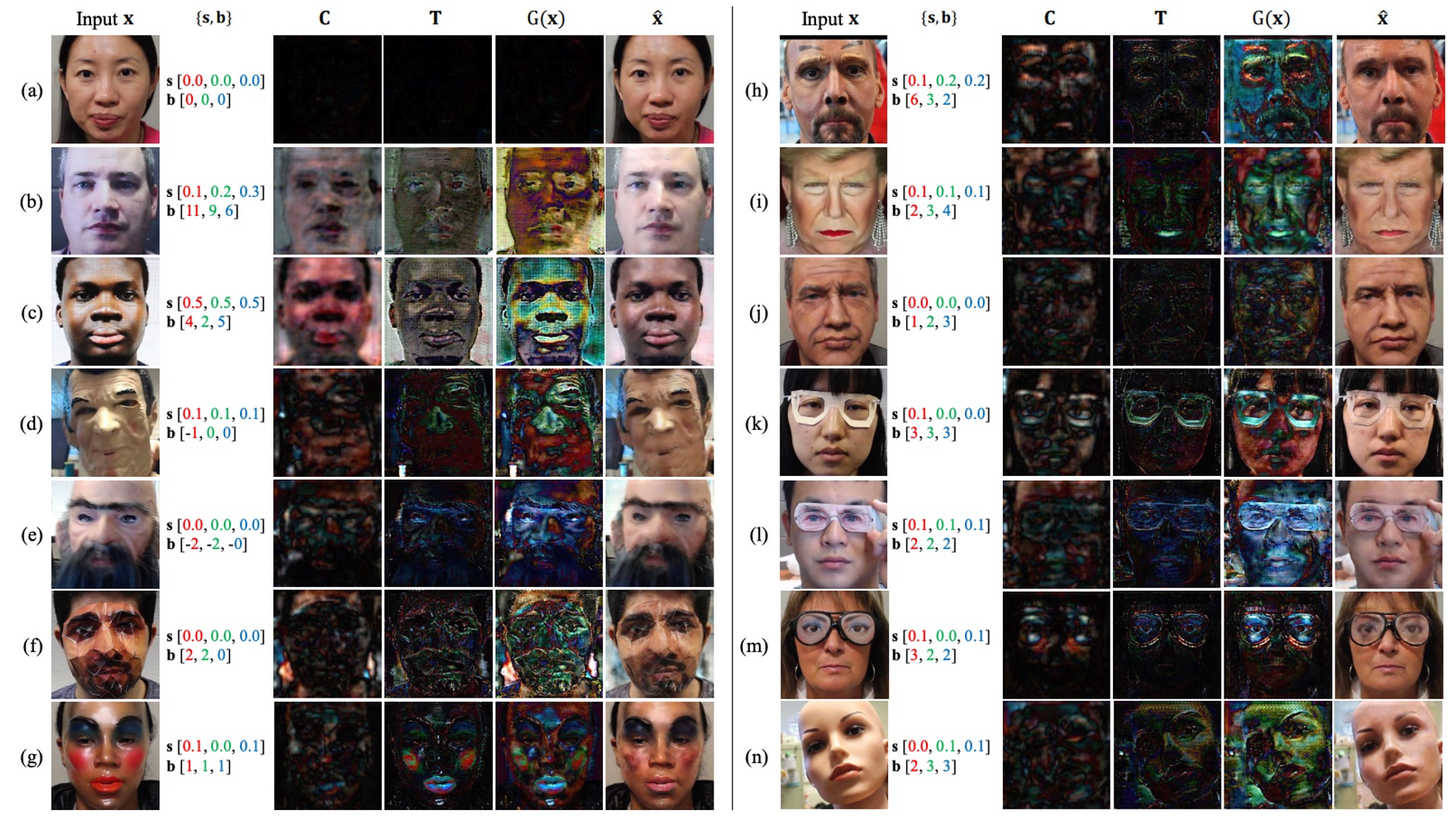
從上圖可以觀察到,不同攻擊類型(印刷、化妝、3D 面具、紙製攻擊等)在 四層元素上呈現不同程度的扭曲或紋理殘留;模型也能將該殘留移植至其他臉上並生成可信的合成假臉,佐證 3D 幾何扭曲層的有效性與 trace 可遷移性。
模組貢獻與消融實驗
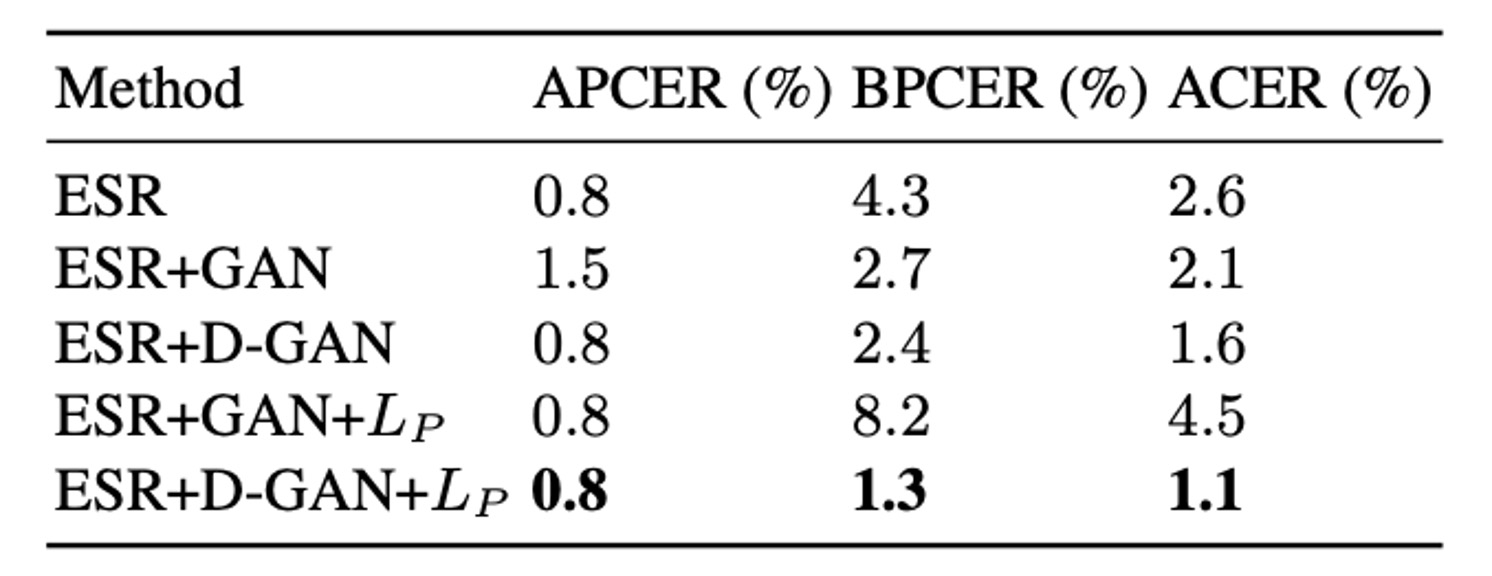
根據實驗結果顯示,整合多尺度判別器與 ESR(Early Spoof Regressor)的設計,能同時優化重建品質與對抗性,使 ACER 由 2.6% 進一步下降至 1.6%。
在所謂 ESR + D-GAN + 的最終配置下,合成樣本能提供強監督訊號,並避免不良 spoof 生成導致的誤差累積,使最終 ACER 可穩定到 1.1%。
結論
與其問真假,不如先問:假象從哪裡滲出?
STDN 將活體偵測從「黑盒分類」轉寫為「痕跡拆解 — 重建 — 合成」的循環,延伸了早期 de-spoofing 與顯著圖方法,使可視化證據真正成為模型的一級產物。
這不只是網路結構的調整,更是思考角度的遷移:先理解假象,再談辨識真假。
當然,STDN 還是有其弱項:
- 假痕定義鎖定在影像域,高擬真 3D 面具或跨模態攻擊尚待驗證;
- 合成樣本的幾何與質感一致性,受限於生成器能力與監督訊號;
- trace 對其他感測維度(聲波、深度、血流訊號)的延伸機制,仍屬空白。
儘管如此,STDN 提供了一條可追蹤的未來路線:
假象若能被顯式標示,就能被合成;能被合成,就有機會對抗。
在真假難辨的技術洪流中,真正有價值的,從不是單純判分,而是拆解假象的語法與結構。
這條路確實比分類曲折,但 STDN 作為多攻擊「痕跡解耦」框架的早期關鍵里程碑之一,已為後續工作奠定了基礎。