[20.04] SSDG

穩定的真實
Single-Side Domain Generalization for Face Anti-Spoofing
用來攻擊人臉辨識系統的手法花樣百出,解題的辦法也不遑多讓。
從這篇開始我們可以來看一下,基於 Domain Generalization(DG)技術的 FAS 研究。
定義問題
為了 FAS 的問題,研究者們發展出兩大類技術路線:
-
紋理導向: 透過圖像的細節差異來辨識真假臉,例如顏色失真、材質紋理異常等。方法包含手工特徵(如 LBP、HOG、SIFT)以及近年來的 CNN 特徵學習。
-
時間序列導向: 分析多幀影像中的變化,例如眼睛眨動、嘴部動作或 rPPG 脈搏訊號等,搭配 CNN-LSTM 或 RNN 架構來捕捉活體跡象。
這些方法在特定資料集內(intra-database)表現相當亮眼,但一旦模型被丟到另一個資料集上(cross-database),準確率便急遽下滑。
舉個例子吧:
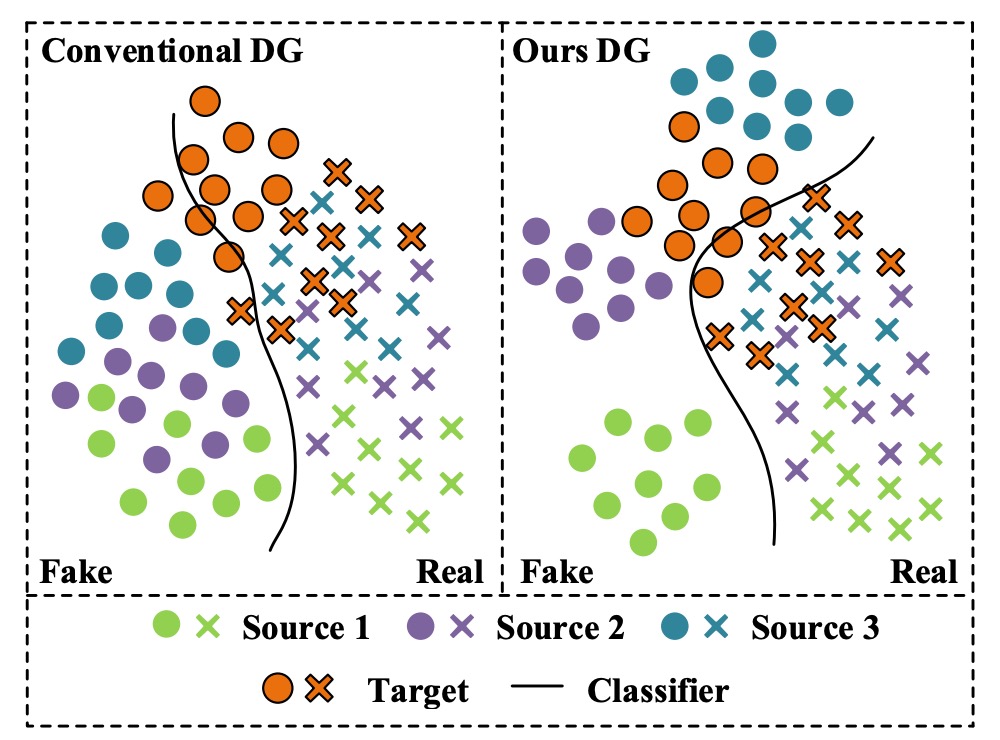
我們先看左邊這張圖。
以實務上的經驗來說,每個顏色可以代表「某個手機型號」:
- 綠色:iPhone XX
- 紫色:Samsung OO
- 藍色:Pixel YY
然後是:
- 橘色:某一隻攝影成像品質跟大家截然不同的手機,但沒有在訓練資料集內。
當我們用前三種資料集訓練了一個 FAS 模型後,這才發現「橘色」手機的通過率特別低。可是偏偏橘色手機的使用者特別多,所以我們推送這個模型後,就會收到海量的客訴。
原本我們期待的是右邊這張圖的情況,模型在訓練階段就有一定的泛化能力,能夠在不同的資料來源上都能有不錯的表現,但現實卻狠狠打了我們一巴掌。
無法有效泛化到不同的資料來源的問題會一再重複發生,其中原因有很多:
- 分佈差異:訓練資料集與測試資料集的來源不同,例如背景、解析度、光線條件、拍攝設備與人種組成。
- 假臉的多樣性遠高於真臉,從攻擊方式到製作流程變化極大,使得統整假臉特徵變得困難,進而導致分類邊界模糊化。
傳統方法過度依賴資料集特有特徵,導致模型學到的表示帶有明顯「資料集偏見」。
因此,本篇論文的作者認為 FAS 的命題應該是:
在無法使用任何目標資料的前提下,設計一個具備高泛化能力的模型。
不然,哪怕是我們搜集再多的資料集,也還是無法應對來自不同來源、不同攻擊類型的假臉。
解決問題
為了解決「假臉特徵高度異質」與「真臉相對一致」所帶來的泛化困難,作者提出了一套全新的防偽訓練策略:Single-Side Domain Generalization(SSDG)。
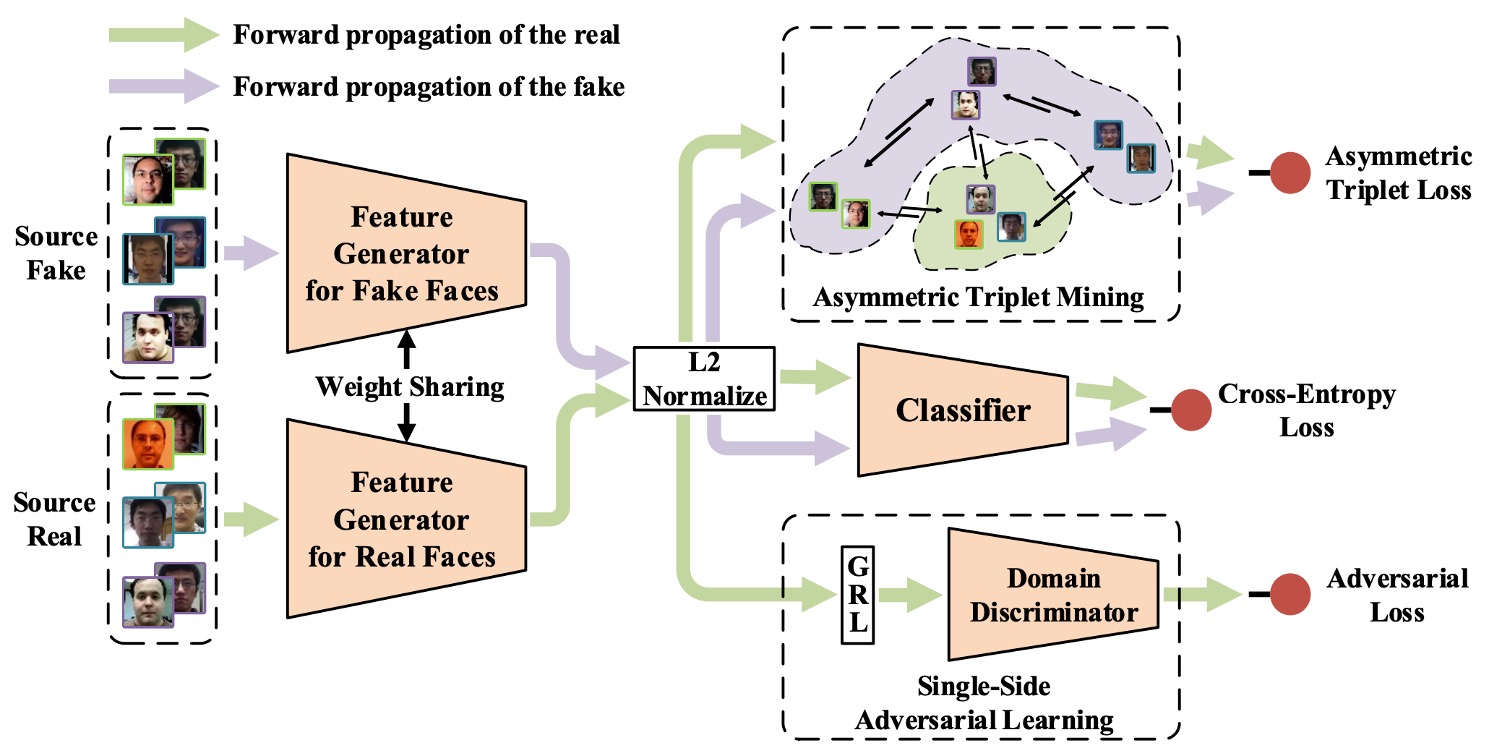
如上圖所示,這套架構的設計理念可以概括為一句話:
真臉的特徵愈近愈好,假臉不理他們。
也就是說,SSDG 並不強求為真假臉建構一個共同的泛化空間,而是採取非對稱策略——針對真臉進行跨域對抗訓練,使其分佈趨於一致;對假臉則刻意保留分佈差異,甚至強化其特異性。
這種對比式的學習設計,讓分類邊界更穩固,同時能有效泛化到未見過的目標資料集。
整體模型包含以下幾個關鍵模組:
- 特徵生成器(Feature Generator, G)
- 域分類器(Domain Discriminator, D)
- 防偽分類器(Face Anti-Spoofing Classifier)
- 非對稱 Triplet Loss 訓練
- 特徵與權重正規化模組
我們依序看一下。
單邊對抗學習
在 DG 領域中,為了讓模型克服跨域的挑戰,常見的用法是加入對抗訓練(Adversarial Training),讓模型無法分辨樣本來自哪個域(domain),從而學到域不變(domain-invariant)的特徵。
方法很簡單,就是給模型加上一個「域分類器」,讓它學習將樣本分為「來源 A」或「來源 B」。
一般來說,我們會讓分類器隨著分類效果提升而降低其 loss,但在對抗訓練的情境下則相反:分類效果愈好,loss 愈高,迫使模型「不可以」學習到 domain-specific 的特徵。
在這篇論文中,作者提出了一個新的對抗學習方法:
- 單邊對抗學習(Single-Side Adversarial Learning)。
建模方式如下:
設有 個來源資料集,記為 ,每個都包含:
- 真臉樣本
- 假臉樣本
將其餵入特徵生成器,得到特徵表示:
由於參數共用,實際上 與 是同一模型 ,這只是在概念上區分輸入來源。
接著將 輸入域分類器 ,判斷其屬於哪個資料集。為了讓模型學到跨域一致的真臉特徵,在這裡會讓特徵生成器 G 嘗試「欺騙」這個分類器,形成一個對抗學習過程。
整體損失函數如下:
此處的 是 domain 標籤, 是指示函數,表示樣本是否屬於第 個資料集。
在這個對抗過程中,假臉完全不參與,避免其高變異性污染對抗訓練的穩定性。
為了實作這種「一邊訓練、一邊互相對抗」的機制,作者採用了 Gradient Reversal Layer(GRL)。這是一個常見於 DG 模型的 trick,我們等一下再講。
非對稱三元組學習
既然這裡放棄了將假臉壓縮進共同特徵空間,那就得想辦法讓它們彼此分離、與真臉拉開距離。這就是非對稱 triplet loss 要解決的問題。
實作方式如下:
假設有三個來源資料集,我們將樣本重新劃分為四類:
- 所有真臉 → 一類(Cross)
- 三組假臉 → 各為一類(Circle / Square / Triangle)
目標是同時滿足:
- 假臉彼此分開(inter-domain separation)
- 真臉彼此聚合(intra-class compactness)
- 真臉與假臉之間拉開距離(inter-class separation)
如下圖所示:
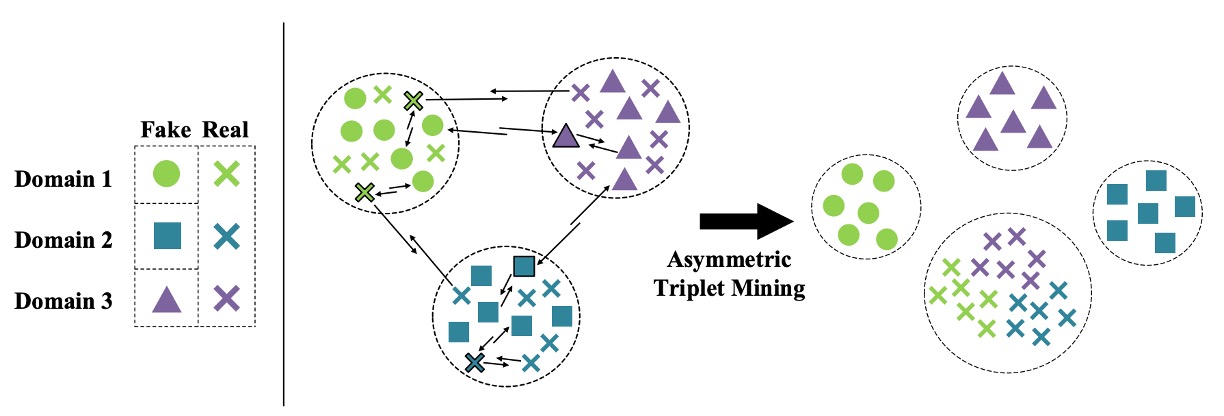
對於每一組 anchor / positive / negative 組合 ,非對稱三元組損失定義如下:
其中 是 margin 超參數,控制分類邊界的寬度。
這樣設計可以強制模型學會在特徵空間中自然拉開真假臉的區隔,同時維持真臉的穩定集中分佈。
特徵與權重正規化
作者進一步引入了雙重正規化設計,以提升特徵的一致性與分類邊界穩定性:
-
Feature Normalization: 對所有輸出特徵進行 L2 正規化,確保它們位於單位球面,消除圖像品質(如光線、鏡頭等)帶來的 norm 差異。
-
Weight Normalization: 將分類器的權重向量 正規化為單位長度,bias 設為 0,使得分類決策簡化為:
這讓模型專注於方向性區分,而不是依賴特徵大小,進一步穩定判別結果。
將上述模組整合後,整個 SSDG 框架的訓練損失為:
其中:
- :一般分類器的 cross-entropy 損失
- :平衡係數,用來控制對抗與三元組損失的權重
與過去需先 pre-train 再 fine-tune 的做法不同,SSDG 採取 end-to-end 訓練策略,所有模組同步優化,簡化流程,也提高整體穩定性。
看到這邊,你應該會聯想到人臉辨識領域中的各種 margin-based loss。實作的時候都可以拿來試試看。
延伸補充
考慮到有些讀者可能沒接觸過 DG,或是對於 GRL 的概念還不太熟悉,我這邊補充一段簡單的技術筆記,讓大家能夠快速理解 GRL 的概念與實作方式。
什麼是 GRL?為什麼它對 DG 這麼重要?
在 Domain Generalization(DG)與 Domain Adaptation(DA)中,一個非常經典的技巧叫做 Gradient Reversal Layer(GRL),它最早來自 2015 年的 DANN 論文(Domain-Adversarial Neural Network),核心作用是讓模型在訓練過程中進行「對抗式特徵學習」。
DANN 是一篇引用數破萬的大論文,有空我們可以來聊聊它的內容。
如果用一句話來解釋 GRL 的話,就是:
Forward 時什麼都不做,Backword 時偷偷把梯度「乘上 -1」。
這麼一來,我們就能創造出兩個訓練目標互相拉扯的效果:特徵提取器努力「讓資料來源無法被辨識」,而域分類器努力「辨識資料來源」,這正是對抗學習的精神。
DG 的目標,是讓模型學會不依賴「資料來源」這個資訊,也就是讓特徵具有 domain-invariant(跨域不變性)。但這種特徵沒辦法直接「教」,只能透過反向信號來「逼」模型學會:
- 如果資料是來自不同 domain,那麼特徵提取器要騙過 domain classifier,讓它無法分辨
- 若 domain classifier 太強,那特徵提取器就更努力讓 domain 混淆,這種互相拉扯才會收斂出一個對所有 domain 都有效的特徵空間
而 GRL 就是實作這個拉扯機制的利器,讓整個流程可以用標準 backpropagation 自動優化。
我們可以簡單實作一下 GRL 的 forward 與 backward 過程:
import torch
from torch.autograd import Function
class GradientReversalFunction(Function):
@staticmethod
def forward(ctx, x, lambd):
ctx.lambd = lambd
return x.view_as(x)
@staticmethod
def backward(ctx, grad_output):
return grad_output.neg() * ctx.lambd, None
def grad_reverse(x, lambd=1.0):
return GradientReversalFunction.apply(x, lambd)
使用方式就像這樣插入模型的 forward:
class DomainAdversarialNetwork(torch.nn.Module):
def __init__(self):
super().__init__()
self.feature_extractor = ...
self.classifier = ...
self.domain_discriminator = ...
def forward(self, x, lambd=1.0):
feat = self.feature_extractor(x)
class_out = self.classifier(feat)
# 插入 GRL:反傳時自動反向梯度
reversed_feat = grad_reverse(feat, lambd)
domain_out = self.domain_discriminator(reversed_feat)
return class_out, domain_out
其中 lambd 是一個控制反向強度的超參數,在 SSDG 論文中使用的是時間動態調整公式:
這樣設計可以讓模型在訓練初期專注於分類任務,隨著訓練進行,對抗學習的強度逐漸提升,最終達到平衡。
討論
資料集測試設定
這個測試的方式到現在(2025 年)都還在用,讀者不妨可以記起來。
作者使用了四個公開的資料集來進行實驗,來源分別是:
- O:OULU-NPU
- C:CASIA-FASD
- I:Replay-Attack
- M:MSU-MFSD
測試方式為每次隨機挑選一組資料集作為測試資料集,其餘三組作為訓練資料。這樣的設計可以模擬實際應用中,模型面對全新資料來源的情況,總共有四組測試任務:
- O & C & I → M
- O & M & I → C
- O & C & M → I
- I & C & M → O
這樣的交叉設計,能準確模擬部署時最常見的問題:系統要面對的資料,很可能從來沒出現在訓練集裡。
和其他方法的比較
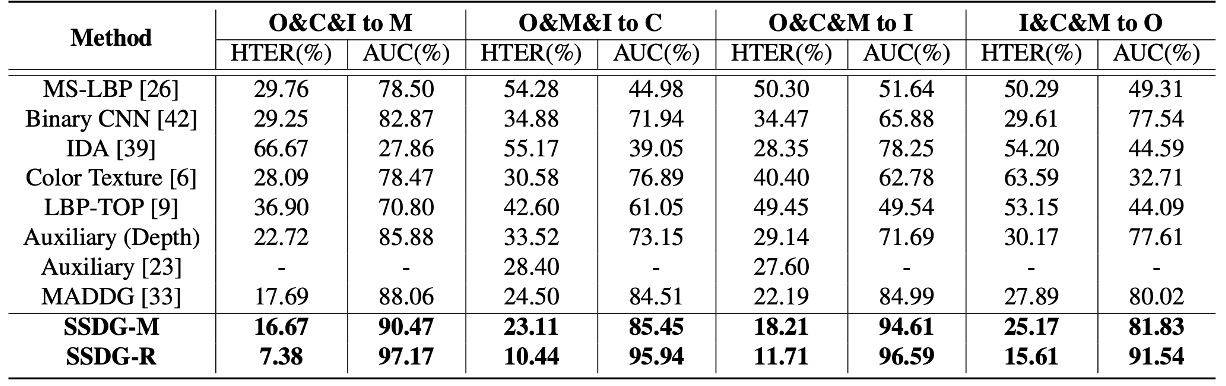
作者彙整了目前最具代表性的 FAS 方法,在四個 cross-database 測試任務上的表現,包括:
- CNN-based 方法(Yang et al., Atoum et al.)
- 時序與生理信號方法(Liu et al. rPPG)
- 傳統特徵派(LBP、SURF)
- MADDG 方法(現有唯一 DG 對手)
在上面表格中,如果 SSDG 用的是 MADDG-based 架構,則稱為 SSDG-M;如果是用 ResNet18-based 則稱為 SSDG-R 。
實驗結果顯示出 SSDG 大獲全勝,在所有任務上拉開明顯差距:
- HTER 降低
- AUC 提升
- 整體結果一致穩定,沒有「運氣好贏一場」的情況
根據這個結果,作者給出幾個關鍵觀察:
-
大部分現有方法沒處理跨資料集分佈問題:
- 它們在 intra-database 上很好看,但一換環境就破功
- 本質上仍然學到的是 dataset-specific 特徵,而非可泛化表示
-
MADDG 是少數例外,雖使用 DG,但策略上仍有盲點:
- 它依然試圖為真假臉共同建構一個 generalized 特徵空間
- 假臉變化太大、來源太雜,這樣的對齊其實很難收斂,經常導致次優的結果
反觀 SSDG 採取的非對稱學習策略反而更務實:
- 真臉:跨域 alignment,學穩定表示
- 假臉:主動分離,不強行對齊
這個「讓該聚的聚、該散的散」策略,才是 SSDG 真正勝出的地方。
消融實驗
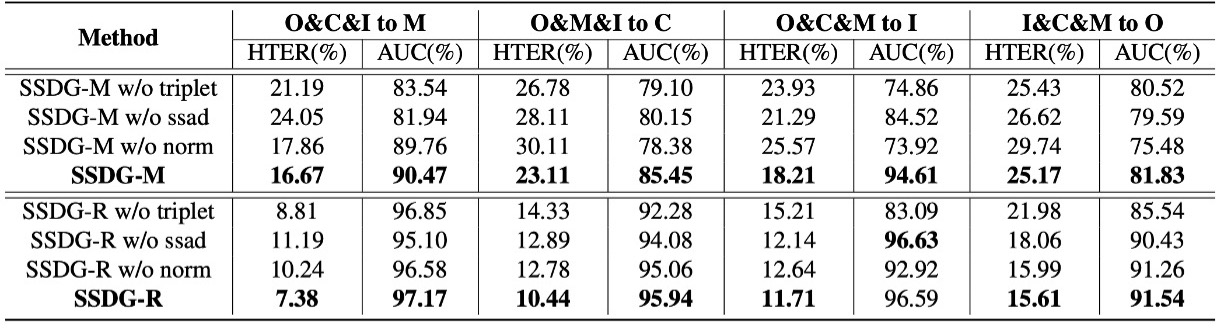
在這張表中,作者拆解了 SSDG 的三大核心模組,來觀察單獨移除某個模組會帶來什麼樣的影響:
- ssad:單邊對抗學習(Single-side adversarial)
- triplet:非對稱三元組損失(Asymmetric triplet loss)
- norm:特徵與權重正規化
分析結果顯示:不論是 MADDG-based 還是 ResNet18-based 架構,只要缺了任一模組,HTER 指標就會上升、AUC 就會下降。而完整搭配三個模組的 SSDG 表現最好也最穩定。
這顯示 SSDG 的效能並不是靠某個關鍵技巧硬撐,而是整體設計互相協作、環環相扣。
結論
這篇論文提出的 SSDG 框架,不是靠更大的網路或更多的資料,而是從策略設計上回應了一個被忽視的事實:
真臉是一種穩定訊號,假臉是一種混亂訊號,兩者根本不該被一視同仁。
透過這個策略,SSDG 在四個公開資料集上全面勝出,甚至在資料受限、架構精簡的情況下仍能撐住場面。這種差異化學習策略在後來成為防偽任務的標準思維模式,不再用一個統一假臉概念處理所有異常樣本。
這也讓 SSDG 成為了 FAS 領域中一個重要的里程碑,開啟了後續許多基於 DG 的研究。