[24.02] MMDG

信任管理學
Suppress and Rebalance: Towards Generalized Multi-Modal Face Anti-Spoofing
在這篇論文發表的當下,電腦視覺領域已經是多模態架構的天下。
但 FAS 的問題依然存在,跨域泛化始終都是個難題。
定義問題
RGB 模型跑得快,資料集建構相對容易。其他模態的資訊也不是不好,像是深度圖可以看到立體結構,紅外線能感測溫度或材質反光,對於判斷「這張臉是真是假」其實非常有幫助。
但為什麼多模態幾乎沒人用呢?或是用了之後,反而泛化更差,幾乎找不到可以落地機會?
作者點出了兩個關鍵:
-
Modality Unreliability(模態不可靠)
感測器一換、光源一變、domain 就整個跑掉。尤其是 IR 跟 depth,原本該補強的資訊,反而成了誤導的來源。
你用 cross-modal fusion 把所有模態的資訊湊在一起,結果好壞參半,還會彼此拖累。
-
Modality Imbalance(模態失衡)
模型訓練時會自動挑「學起來最快的模態」,通常是 RGB。
其他模態的資訊學不進去,只是表面上有用、實際上沒被學好。一旦到了 target domain,RGB 不管用了,其他慢模態也還沒練成,只能一起陪葬。
所以你看,多模態 FAS 的難,不只是在「多」,而是這些模態根本就不平等,也不可信任。
因此,這篇論文的作者認為:
我們得同時處理「不可靠的訊號來源」,還要訓練一個「不偏心的模型」。
這就是這篇論文的問題定義核心。
解決問題
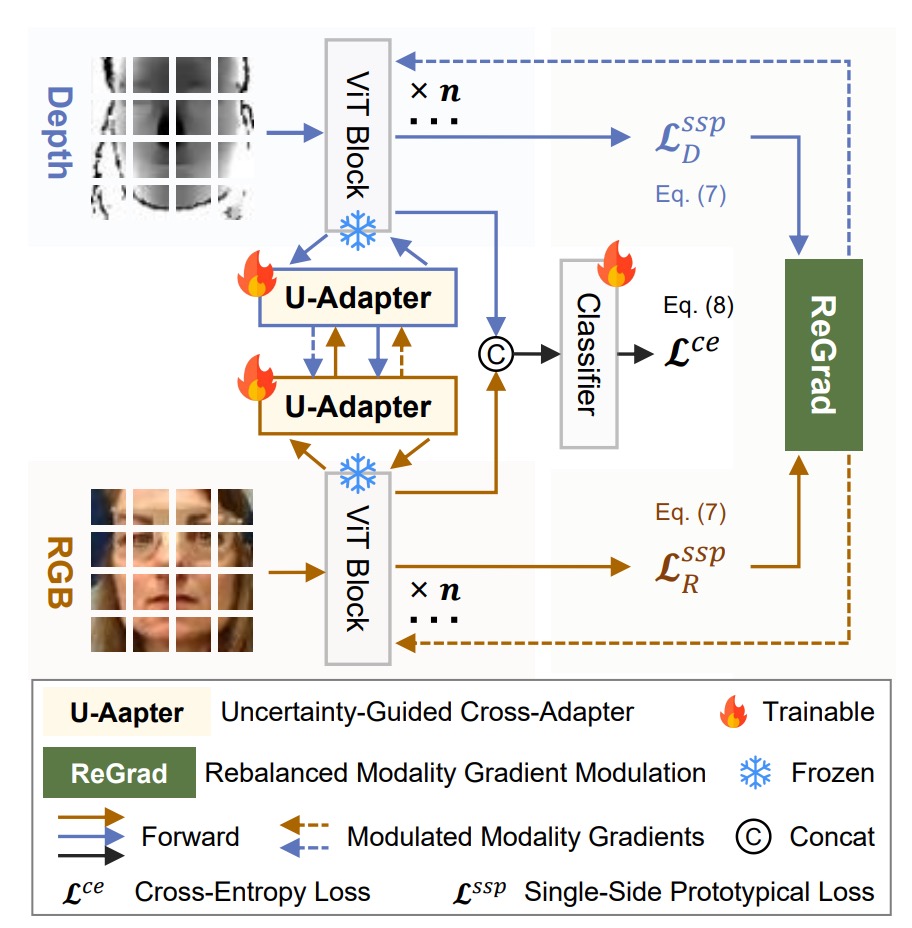
為了解決多模態 FAS 的問題,作者提出 MMDG(Multi-Modal Dynamic Gradient)架構,主打兩個功能:
- Suppress(抑制不可靠模態):在跨模態融合時,對不可靠的模態進行懲罰,讓它們的影響力變小。
- Rebalance(平衡模態學習速度):在訓練時,對模態間的梯度進行調整,讓每個模態都能夠有效學習。
從上架構圖來看,每個模態(RGB、深度、紅外線)各自有 ViT backbone,再接上自己專屬的 U-Adapter 負責跨模態融合。
訓練時,只有 U-Adapter 會被 fine-tune。最後透過 ReGrad 模組對梯度做動態調整,確保每個模態都能有效學習,不會誰拖累誰、誰搶進度。
U-Adapter
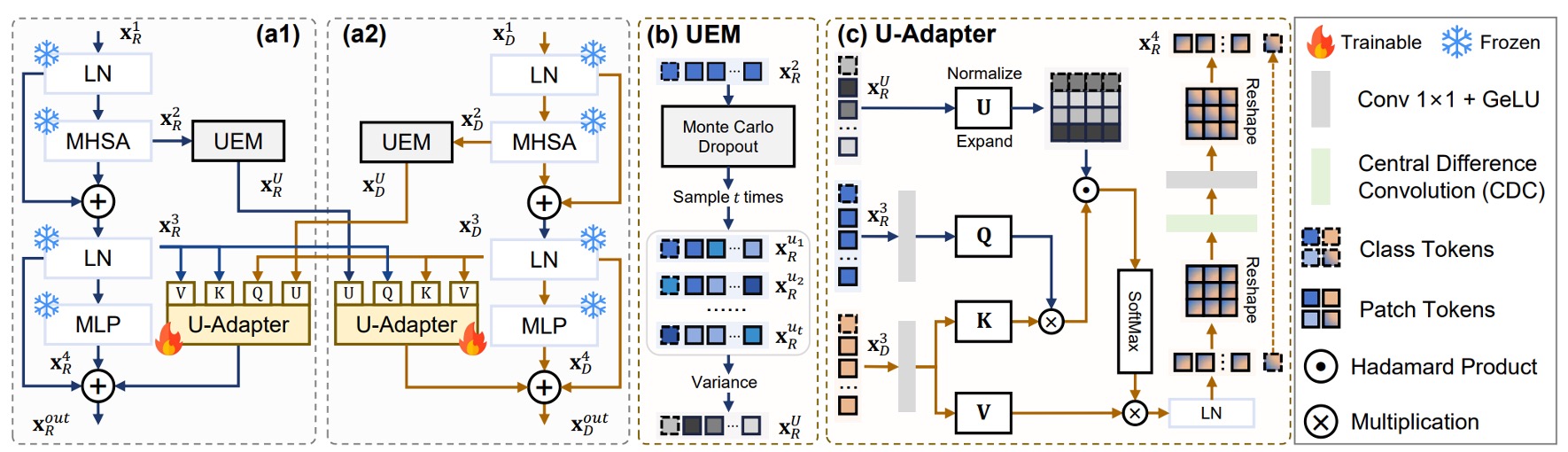
如上圖所示,U-Adapter 是這篇方法的核心模組,被嵌入在每個 ViT block 之後,僅對 Adapter 進行微調。它的任務是:
- 偵測每個模態中「不可靠」的 token(透過不確定性估計模組 UEM);
- 在做跨模態融合時,對這些不可靠 token 降低影響力,避免其資訊污染其他模態。
如果你對 Adapter 的概念不熟悉,可以參考我們之前的筆記:
不確定性估計模組
參考上圖的 (b),為了找出不可靠的區域,作者引入了不確定性估計模組:
- Uncertainty Estimation Module(UEM)。
這個模組使用 Monte Carlo Dropout(MCD)技巧,在每個 Multi-Head Self-Attention 後進行多次隨機採樣,估算每個 token 的不確定性。
設 為 MCD 採樣結果,不確定性估計為:
跨模態融合機制
參考上圖 (c),U-Adapter 不只是做融合,而是 有選擇地融合。
它會壓制來自其他模態的「可疑 token」,避免擴散誤導。
以深度模態為例,其 U-Adapter 的融合過程如下:
- Query 來自另一模態(例如 RGB)的
- Key 與 Value 來自自己的
- 融合過程會根據 RGB 模態的不確定性 進行調整
其公式如下:
其中:
- 、、 為 query、key、value 線性投影
- 是不確定性懲罰權重,越不確定的 token,影響力越低
- 表示 Hadamard product(逐元素乘法)
- 是 Central Difference Convolution,用來增強 token 間的 local difference,彌補 ViT 缺乏鄰域敏感性的問題
三個模態的最終輸出 結合了兩次跨模態融合,以及 ViT block 自身的殘差連接:
其中:
- :ViT block 中的 LN 輸出
- :ViT block 中的 MLP 輸出
- :模態 對應的不確定性估計
為避免模態間「彼此誤導」,作者「不允許 depth 與 IR 互相融合」,僅允許它們各自接收來自 RGB 的資訊。
ReGrad
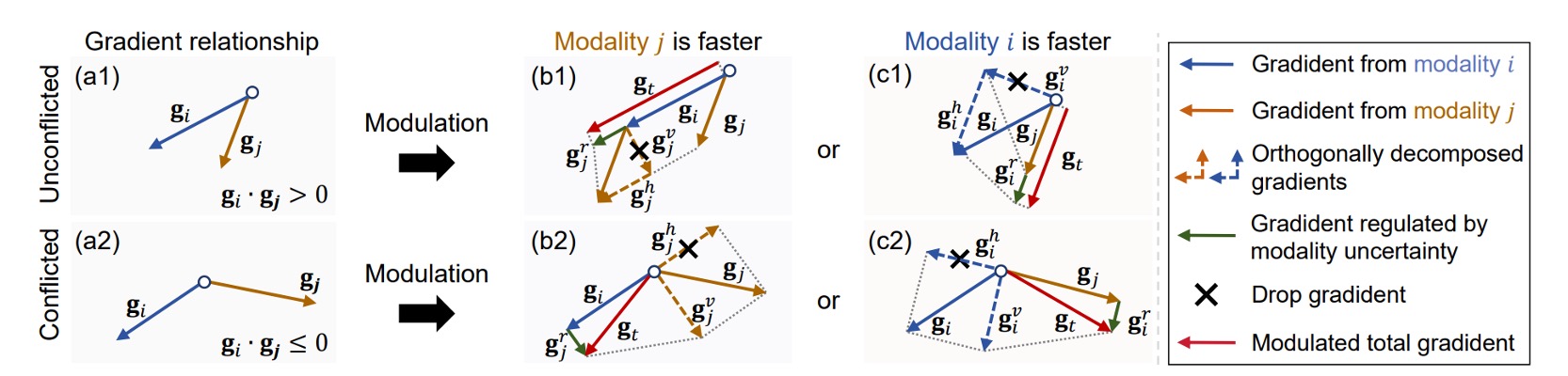
ReGrad 的目標很簡單:讓慢的模態學得更多,快的模態學得少一點。
但實際上,每個模態的梯度方向不一定一致,甚至會彼此打架。
所以作者做了這件事:
根據模態的快慢程度與梯度是否衝突,決定要保留哪一部分的梯度、壓抑哪一部分,並且加上不確定性懲罰來控制影響力。
以下是四種情況的處理方式,對應圖四中的 (b1)、(b2)、(c1)、(c2):
其中:
- 、:模態 和 的反向傳播梯度向量
- 、:各模態的不確定性(batch-level)
- :不確定性懲罰函數,定義為 ,會壓制不穩定模態的梯度影響力
上面的式子看起來雖然猙獰,但其實不難理解:
- 如果你是慢的那一方(),就會拿到額外幫助,來自 的梯度
- 如果你是快的那一方(),不僅不會得到幫助,甚至還會被壓制
- 如果兩人學習方向不同(conflict),就會先做向量投影,只留下對彼此無害的部分
- 最後,乘上 這個不確定性懲罰因子,來壓制那些「學很快但其實不穩定」的模態
SSP Loss
除了梯度調節,MMDG 還加上了一個對模態內聚有幫助的 loss:
- Single-Side Prototypical Loss(SSP)。
首先,對每個模態 ,每個 domain 的原型向量定義為:
接著,SSP Loss 定義如下:
這個 loss 會讓每個樣本往所屬 domain 的 prototype 聚集,強化模態內部的判別性。
綜合來看,整體 loss function 為:
其中 是分類任務的交叉熵損失, 用來調整 SSP 的影響比例。
討論
和其他方法的比較
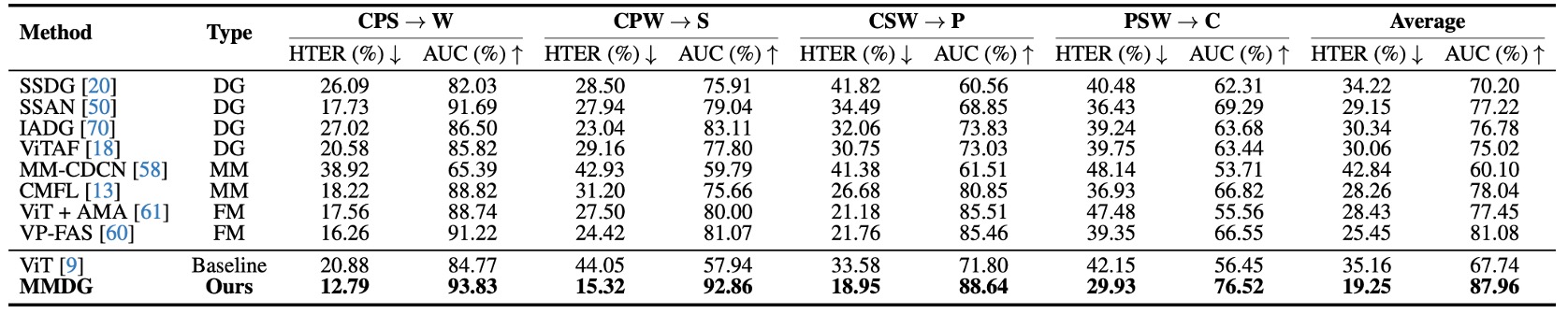
表格橫軸是測試資料集(被當作 unseen domain),縱軸則是不同的方法,包含:
- 傳統的 Domain Generalized 方法(SSDG、SSAN、IADG...)
- 多模態方法(CMFL、MM-CDCN)
- 可彈性處理缺模態的 Flexible-modal 方法(ViT+AMA、VP-FAS)
測試方法是將三個資料集做訓練,一個拿來測試,每次輪流 leave-one-out。
實驗結果顯示:MMDG 的成績在所有組合中都是 最好的,不只超越了多模態的 baseline,也拉開了和 SOTA 的 Flexible-modal 方法 VP-FAS 至少 6% HTER / AUC 的差距。
這是一個蠻明確的訊號:
多模態並不是越多越好,只有「知道哪些資訊該信、哪些該關掉」的融合策略,才能讓模型在看不見的新世界裡活下去。
消融實驗
為了展示每個設計元件的貢獻,作者做了許多消融實驗。
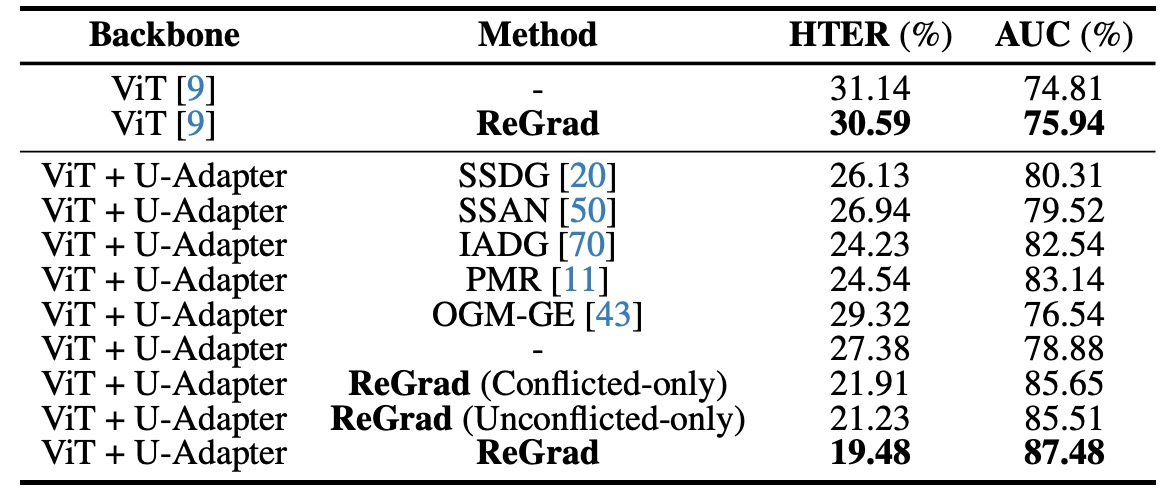
實驗結果顯示,不管你是用什麼方法(DG 或多模態),只要把 backbone 換成 ViT + U-Adapter,都能提升表現:
- 原本用 ViT 的 baseline 模型(像 SSDG、IADG),一旦插入 U-Adapter,表現立刻跳升。
- 甚至不加任何 fancy 方法,只用 ViT + U-Adapter + Cross Entropy,也能打贏一票老派 DG 方法。
如果再加上 ReGrad,那整體表現直接達到 SOTA 水準,這說明了:
- U-Adapter 本身就有「泛用性」,能套用在任意 ViT 架構上,不挑體質。
- 它不只是做融合,更會選擇性忽略不可靠資訊,讓特徵空間變得更乾淨、更穩定。
最後作者也實測了 ReGrad 的兩個變體(衝突和非衝突情況),結果都不如全情境啟動的版本,說明:
- 該讓的時候不讓,學習會失衡;不該干預的時候又多手,反而干擾學習進程。
- 真正泛化的關鍵,不是硬平衡,而是動態判斷整體學習進度。
不確定性機制的效果
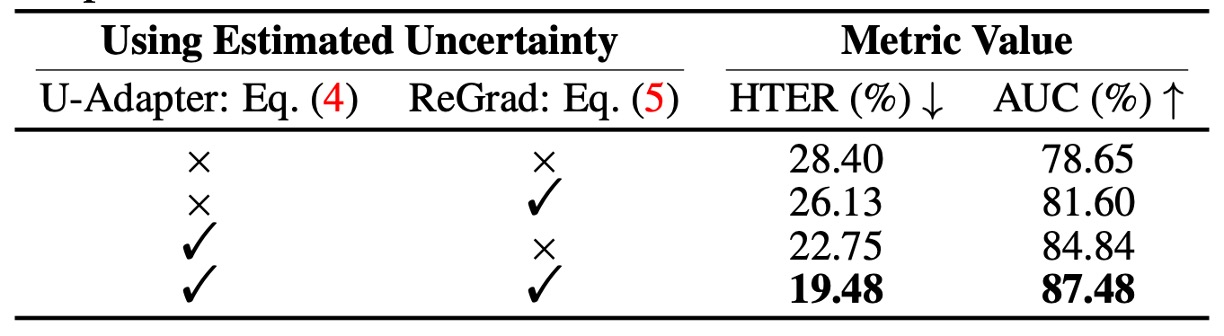
作者直接拆開兩個模組(U-Adapter、ReGrad)裡的 uncertainty,用來驗證:
- 這個估計不確定性的機制到底有沒有幫助?
結果很明顯:
- 如果拿掉 U-Adapter 裡的 uncertainty 控制,性能會下降
- 如果拿掉 ReGrad 裡的 uncertainty 權重,同樣會掉分
- 兩個都用的時候,HTER 與 AUC 最好,甚至提升超過 3%
也就是說,不確定性估計確實可以幫助模型挑出不穩定資訊來源,並阻止它們污染其他模態,還能壓制不穩定模態的影響力。
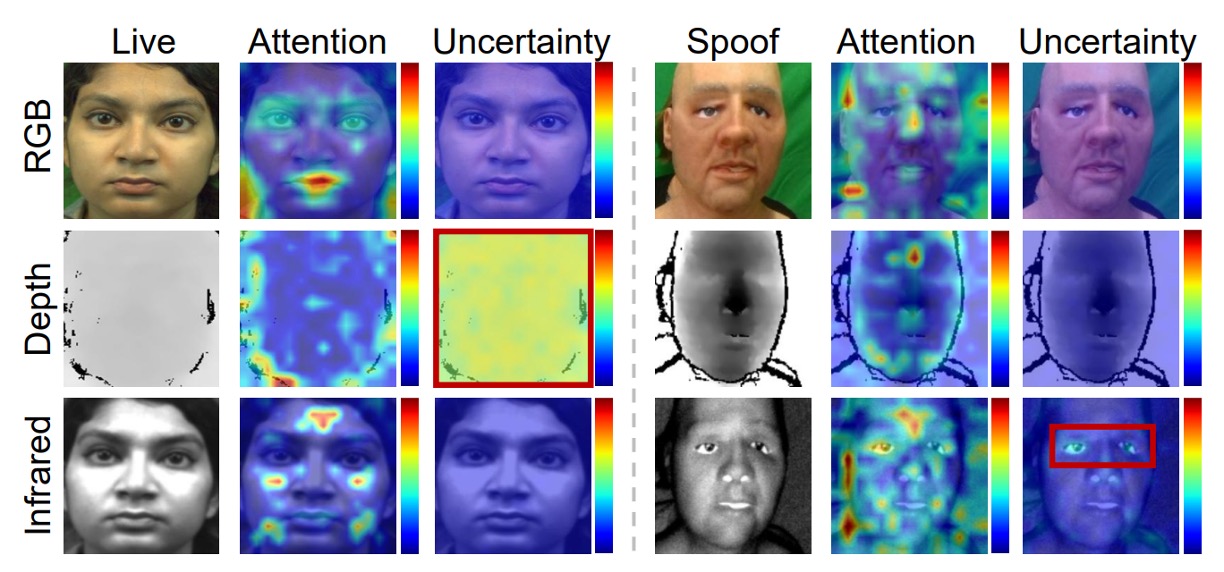
如下圖所示,MMDG 會主動聚焦在 IR、Depth 模態中不確定的區域上,這些區域雖然有誤判風險,但因為被模型「估出來」並壓制掉,才不會誤導整體判斷流程。
結論
人們可能會認為多模態系統的未來會是那種「我全都要」的強化版模型。
RGB 不夠?加 IR;IR 不夠?加 Depth;I 最後再來個 CLIP 式融合!彷彿模態愈多愈安全。
但這篇告訴我們:當 domain shift 發生時,模型能不能正確地判斷「哪些資訊是可信的、哪些該懷疑」,反而才是決定能不能泛化的關鍵。
MMDG 的價值在於它把這個「不確定性」的概念,變成了模型內部的一部份,並進一步用梯度、用融合機制去設計一套「該信誰、該壓誰」的判斷與行動流程。