[23.04] MA-ViT

凡所有相,皆是虛妄
MA-ViT: Modality-Agnostic Vision Transformers for Face Anti-Spoofing
Face Anti-Spoofing(FAS)技術的初衷,是為了防堵那些以照片、影片或立體面具欺騙臉部辨識系統的攻擊手法。
這些攻擊被稱為 Presentation Attacks(PAs),隨著臉部辨識在金融支付、手機解鎖、自助通關等應用中普及,其安全性也成為現代生物辨識系統繞不開的考驗。
定義問題
最早的 FAS 方法,大多僅依賴 RGB 視覺資訊來偵測異常。
然而攻防博弈從未停歇,攻擊手段越來越真實,感測設備也日益多樣。我們開始引入紅外、深度、熱感等模態,企圖拼湊出一個「多光譜的真相」。
而模型架構也隨之演化:從 halfway fusion 的中層特徵拼接,到 late fusion 的決策階段融合,每種策略都試圖更穩固地重建「真假之界」。
問題卻也悄然浮現。
Halfway fusion 雖能強化不同模態特徵的交互學習,但其模型設計往往假設訓練與測試階段擁有一致的輸入模態,一旦某個感測器缺席,整體預測就可能崩潰。
Late fusion 雖保留各模態的獨立通道,使得在模態缺失時仍可執行推論,但其代價是參數倍增與推論延遲,不利於移動端或邊緣設備的部署。
更根本的瓶頸是:這些多模態方法,其實從未解決一個關鍵命題:
我們是否真的理解「什麼是跨模態共通的活體特徵」?
或者說,模型是否真的在學習「臉的真偽」,而非僅僅記住了「模態的差異」?
於是,一個更激進的問題浮現:如果我們可以在訓練時使用多模態的知識,卻在測試時只需要任一模態的輸入,是否能打造出一個真正具備「模態無關性」的 FAS 系統?而這樣的系統,是否能在保持輕量、快速與靈活性的同時,仍保有對偽裝攻擊的敏銳判斷力?
這篇論文的作者對此提出了思考,並嘗試解決這些問題。
這次不是再一次將模態接上,而是先將它們拆開。
解決問題
由於傳統的 halfway 與 late fusion 方法不僅容易被模態缺失打斷,還引入過多運算負擔與模型複雜性。因此,作者希望在這裡可以設計出一種「模態不可知」的模型:
- 在訓練階段吸收多模態知識
- 在測試階段僅憑任一模態也能獨立完成預測
模型架構
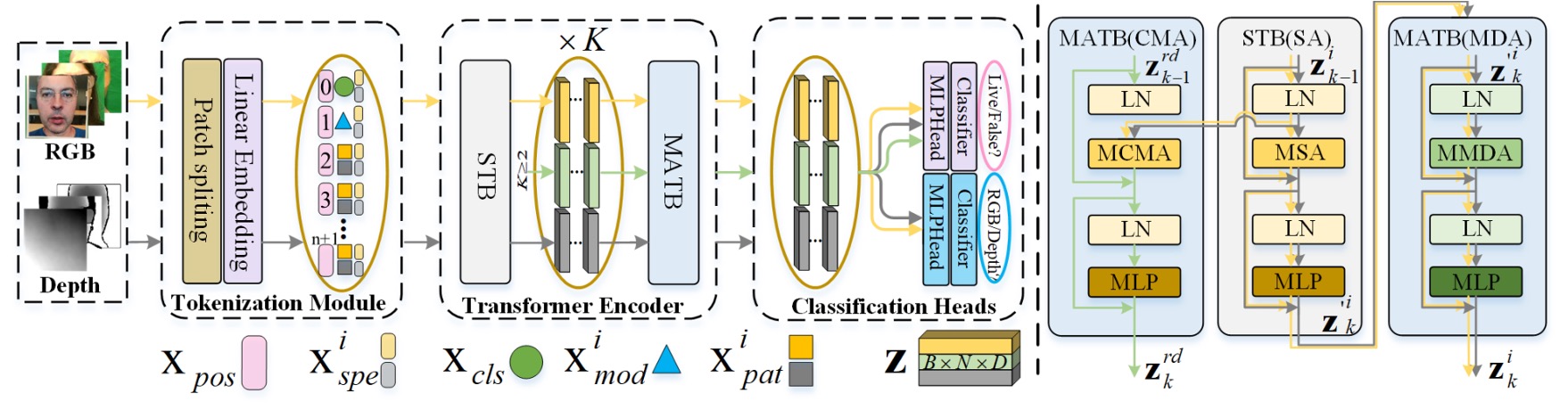
整體架構如上圖所示,MA-ViT 是建立在單一 ViT 主幹的設計之上,包含三個關鍵模組:
- Multi-Modal Tokenization Module(圖中左側)
- Transformer Encoder(中央黃色與黑色箭頭所示)
- Modal Shared Classification Heads(右側分類器)
不同於傳統多分支融合設計,MA-ViT 的關鍵創新在於將所有模態資料共用同一組 ViT 結構,透過一系列標準 Transformer Block(論文中簡稱 STB)和新增的「模態不可知」的 Transformer Block(Modality-Agnostic Transformer Block, MATB)交錯堆疊,共同提煉模態不可知的表徵。
上圖中黃色箭頭表示各模態獨立通過 STB 的路徑,黑灰色箭頭為其後續進入 MATB(MDA)的處理流程。
在 MA-ViT 的輸入端,無論是 RGB 或 Depth 的影像,都會先經過 Multi-Modal Tokenization Module。
如圖中左側所示,輸入影像被劃分為 patch,再轉換為向量 token()。這些 patch token 會與兩個特殊 token 結合:
- :分類 token,最終承載真假預測任務。
- :模態 token,用來引導模型理解輸入的光譜性質。
整體序列經由位置嵌入()與光譜嵌入()加權後,組成初始輸入向量:
這些 token 將進入後續的 Transformer Encoder 流程。
Transformer Encoder 每層由兩部分構成:
-
STB(Standard Transformer Block) 各模態獨立處理,如圖中黃色與黑灰箭頭所示,處理單一模態內部的局部特徵與上下文。
-
MATB(Modality-Agnostic Transformer Block) 接續 STB,每層 MATB 又細分為兩個注意力模組,具體實作細節可參考下圖:
-
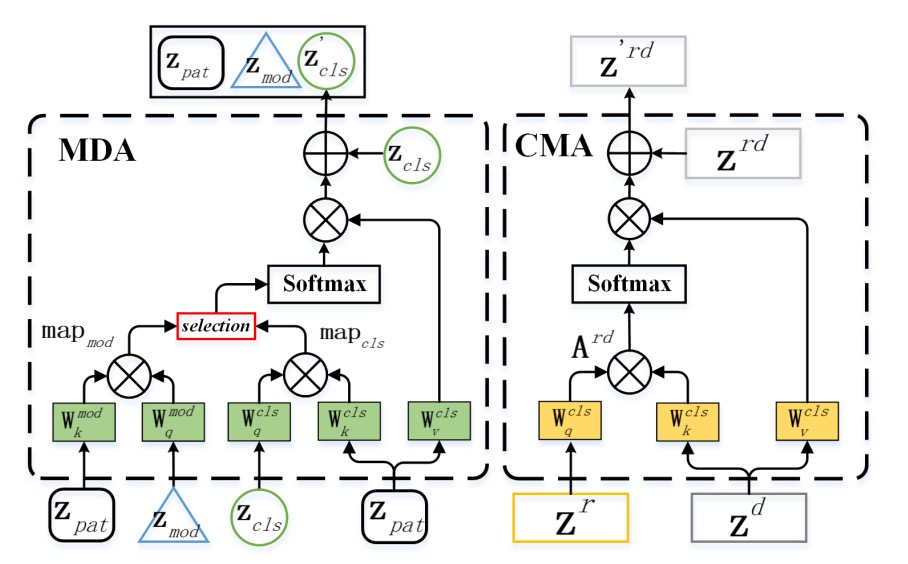
MDA:為了從模態中逃脫
Modal-Disentangle Attention(MDA) 的任務,是讓模型學會忽略那些過度依賴模態特徵的 patch,只專注於模態無關、但與真假辨識強相關的線索。
如上圖左側所示,MDA 首先透過模態 token(MOD)與每個 patch token 的 dot product 計算模態關聯度:
接著透過門檻函數 產生一個遮罩矩陣 ,標記出模態相關性過強的 token。接下來,在 CLS token 的注意力運算中,將這些 token 的關聯值設為極小,達到「斷開聯繫」的效果:
最終的注意力結果僅關注模態無關的 patch:
這是一個「選擇性遺忘」的過程,不是讓模型記得一切,而是只記得它應該記住的部分。
-
CMA:為了讓模態之間彼此照亮
Cross-Modal Attention(CMA) 的任務,則是反其道而行,透過不同模態間的交叉注意力,讓其中一種模態能從另一種模態中補充資訊。
如上圖右側所示,以 RGB()與 Depth()為例,CMA 讓 的查詢向量()對應 的鍵值對進行注意力操作:
反向也同理。這個步驟讓每個模態都能「借視角看世界」,讓看不見的特徵,透過另一模態的上下文被補上。
-
損失設計
為了實現「測試時僅用任一模態也能判斷」的設計,MA-ViT 採用模態共享的分類器,CLS token 預測真假,MOD token 預測模態,兩者損失共同優化:
這樣設計的分類器,可以在模態缺席的情境下,依然維持穩定判斷,避免因某一模態損壞而導致整體系統失效。
討論
為了驗證 MA-ViT 框架的有效性,作者設計了兩類評估場景:
- 固定模態測試:測試模態與訓練模態一致。
- 彈性模態測試:任一模態都可獨立推論。
此外,還包含跨資料集測試與消融實驗,逐步檢驗 MA-ViT 對模態資訊的拆解與轉譯能力。
固定模態場景
在傳統設定中,模型需在固定模態條件下完成推論,這也是過去方法的主要比較場景。
以 MmFA 為例,對比 baseline(無 MATB 的 ViT)與 SEF/MS-SEF 等多模態方法:
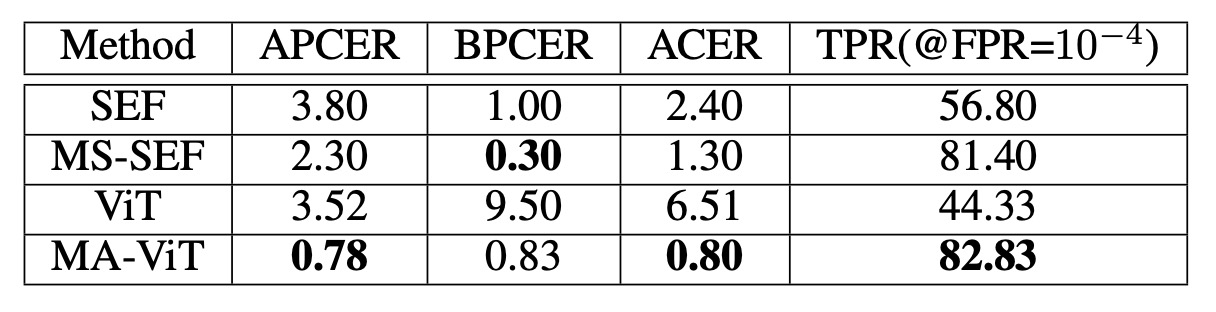
- ViT(無融合)表現不如傳統方法 SEF,顯示 Transformer 在無模態引導下難以判斷真偽。
- 引入 MATB 後,TPR 由 44.33% 提升至 82.83%,ACER 由 6.51% 降至 0.80%,全面超越 MS-SEF。
這表示 Transformer 做不好的原因是因為少了對模態的解構機制。
接著從 CeFA Protocol 的實驗來看:
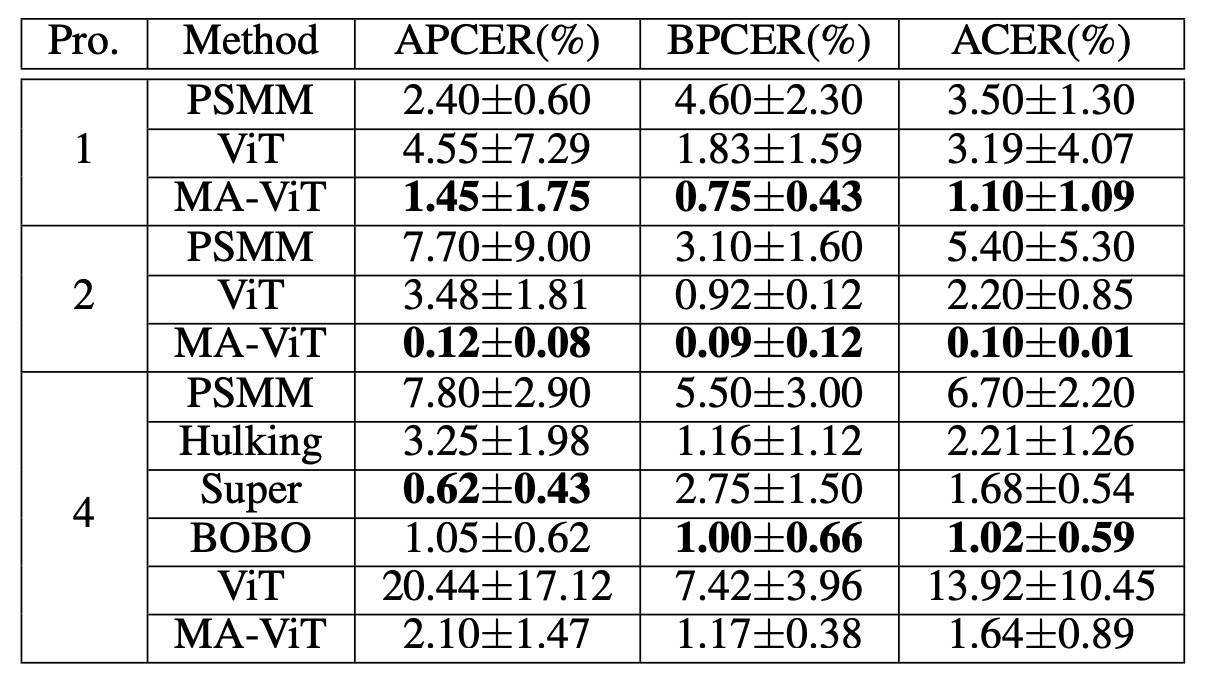
在 Protocol 1、2 和 4 的實驗中,MA-ViT 分別將 ACER 降至 1.10%、0.10%、1.64%,全面勝過競爭對手 Hulking、Super、BOBO。
CeFA 的困難在於模態與族群變異同時存在,MA-ViT 在此情境下仍能穩定泛化,說明其具備高維特徵的共享能力。
最後檢視 WMCA 的表現:

在 WMCA 中,MA-ViT 不僅擊敗先前的最佳方法 CMFL(seen: 1.70%, unseen: 7.60%),更在「眼鏡」與「遮罩」這類 3D 特徵混雜攻擊下表現顯著優勢。這類攻擊難以單靠 RGB 或 Depth 捕捉異常,但 MA-ViT 能利用跨模態特徵補償,抓住局部 spoofing 痕跡。
跨資料集泛化能力
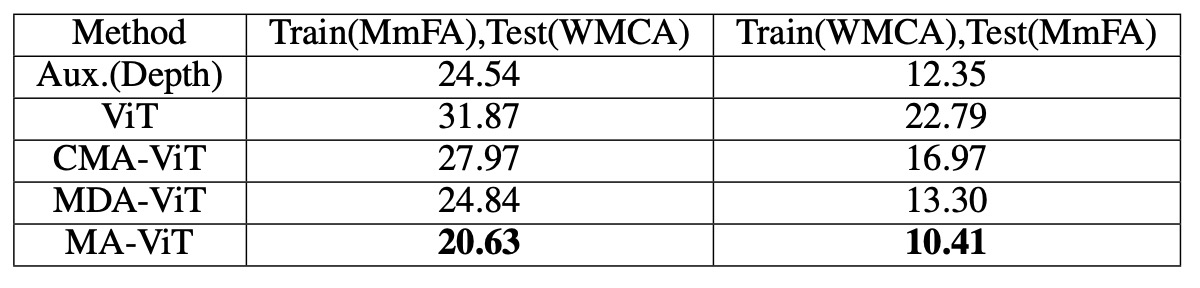
在 WMCA 測試集上,MA-ViT 的 HTER 為 20.63%,優於 SOTA 方法的 24.54%。當將 ViT 的 CMA 換成 MDA,誤差從 27.97% 降到 24.84%,顯示 MDA 對泛化更具貢獻。
這一點也呼應了模型設計初衷:與其追求模態融合,不如先處理模態偏見。
彈性模態場景
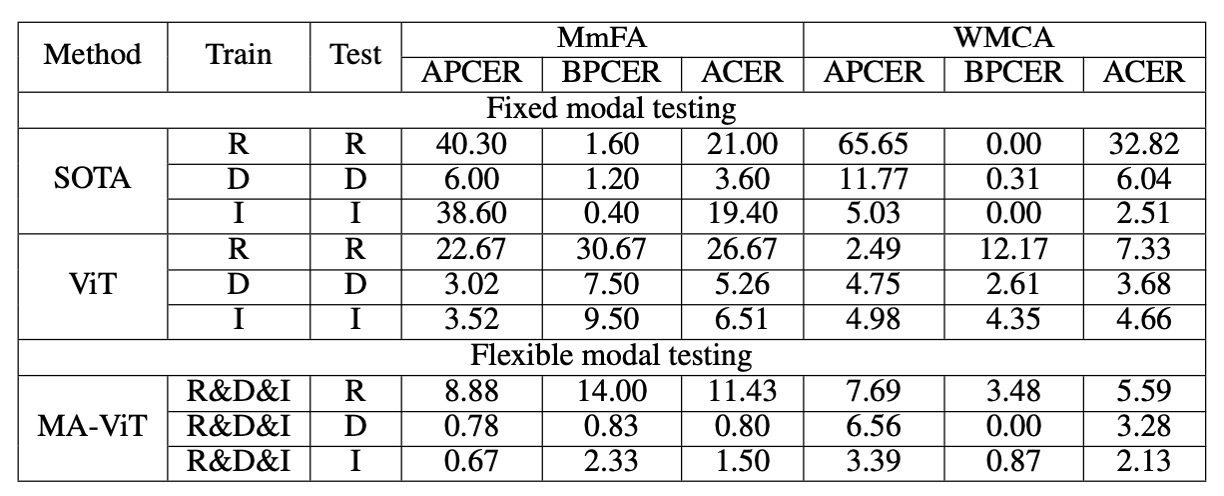
這是 MA-ViT 最具實用價值的部分。
在不重新訓練模型的前提下,MA-ViT 對每一模態的推論結果如下:
- RGB:11.43%(相較 MS-SEF 降低 9.57%)
- Depth:0.80%(相較 MS-SEF 降低 2.80%)
- IR:1.50%(相較 MS-SEF 降低 17.90%)
這說明 MATB 成功讓模型從訓練過程中獲得跨模態的表徵感知力,即使只看到單一模態,仍能借助「隱含在權重中」的多模態知識進行推論。
結論
本研究提出的 MA-ViT,是一個純 Transformer 架構的臉部防偽辨識系統。它不僅能處理任一模態的輸入,更能在模態不完整的條件下,依然穩定推論真假。
這項能力的關鍵,在於我們重新定義了模態的角色,透過 MATB 模組中兩個核心注意力機制:
- MDA:排除模態偏見,保留具鑑別性的活體特徵;
- CMA:跨模態互補,強化局部弱特徵的判斷力。
它的貢獻,不只是一個模型架構的改良,更是一種設計理念的轉向:
「與其記住模態,不如看見本質。」
真正的模型,不應該依賴你給它什麼,而應該具備在「給什麼都能看懂什麼」的能力。