[23.02] M²A²E

舉一反三
Rethinking Vision Transformer and Masked Autoencoder in Multimodal Face Anti-Spoofing
我們一路看論文,大概也知道人臉辨識就是個常常被攻破的系統。
雖然準確率高、用起來方便,但人臉辨識的核心問題始終沒變:你永遠不知道畫面裡那張臉,是人,還是張照片。
定義問題
過去十年,從 LBP 到 CNN,從單模態 RGB 到多模態融合(像是 RGB、IR、Depth),我們已經建構出一整套偵測假臉的系統。然而,不管是手工特徵還是深度學習模型,它們在面對「新型攻擊」或「未見場景」時,仍然會栽在泛化能力這一關。
為了處理這個問題,多模態成為解方之一。
畢竟在高風險場景(像是人臉支付或保險庫門禁)中,單靠一個 RGB 畫面說話太單薄了。IR、深度資訊、甚至熱成像,都能補上不同維度的活體線索。
但問題又來了。
隨著 Vision Transformer(ViT)橫空出世,大家都想把它用在 FAS 上,原因很簡單:
- ViT 的長距離建模能力、跨模態擴展性,看起來剛好補上 CNN 的盲點。
於是有人直接拿來微調,有人額外加模組強化跨模態能力,看起來效果不錯。
只是,我們真的理解它的本質嗎?
- ViT 是否真的適合這樣的多模態任務?
- 為什麼原本在 ImageNet 上表現驚人的預訓練,到了這裡就有點水土不服?
- 如果我們不用 ImageNet,而是自己訓練個 ViT,該怎麼做才不會 overfit?
- 那些模態間的細節差異,ViT 有抓到嗎?
作者的問題不只是一個模型訓練策略的優化,而是回到原點問了一個更基本的問題:
我們真的知道怎麼用 ViT 解決 FAS 嗎?
解決問題
在搞懂問題本質之後,作者針對 ViT 在多模態 FAS 的三個關鍵面向提出了對應的設計:輸入資料的形式、微調策略,以及預訓練方法。
我們就依序來看看。
輸入資料
ViT 雖然擅長全局建模,但缺乏局部細節的敏感度。
在 FAS 任務中,那些能讓人辨識真假臉的關鍵,常常藏在微妙的邊緣紋理或高頻細節裡。這時候,CNN 那種擅長抓「小地方」的特性就顯得特別重要。
於是作者回頭翻出了三種經典的局部特徵描述子來補足 ViT 的盲點:
-
LBP (Local Binary Pattern)
用像素間的強度差計算出二值編碼,對光照變化不敏感,擅長抓紋理細節。
其公式如下:
-
HOG (Histogram of Oriented Gradients)
抓的是邊緣方向分布,透過區塊化的梯度統計向量來表達圖像結構,對幾何和光照變化有一定容錯能力。
-
PLGF (Pattern of Local Gravitational Force)
這個比較冷門,靈感來自萬有引力定律,透過局部引力分佈來強化邊緣與輪廓資訊,特別適合對抗噪聲與光照變化。公式如下:
其中 、 是根據位置設計的方向遮罩,模仿物理引力的分佈。
具體樣式如下圖所示:
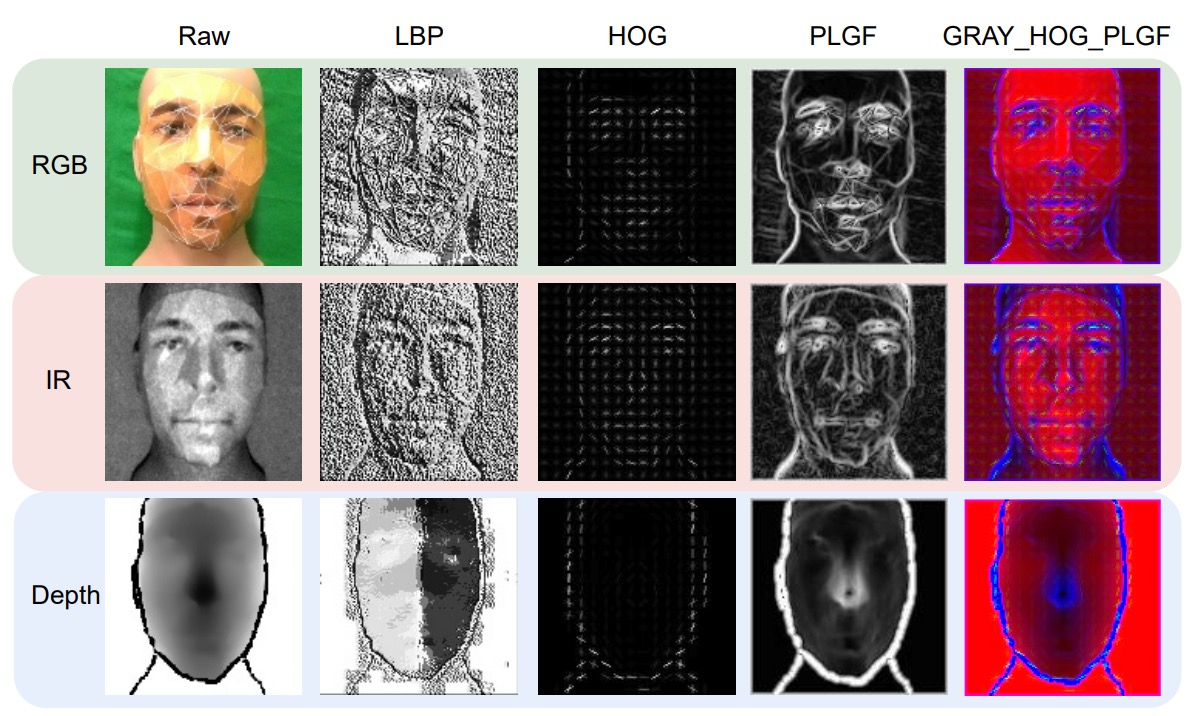
我們可以看到這三種特徵的視覺化效果:從 LBP 的點陣紋理、HOG 的方向分佈、到 PLGF 的輪廓重構,每一種都提供了不同的視角去補強原始模態資料。
作者還試著把這些特徵做組合(例如:GRAY + HOG + PLGF),並當作 ViT 的三通道輸入。這種手工與深度特徵混搭的設計,在多模態 FAS 中顯得特別有效。
模型架構
我們來細看這篇論文的核心模型架構。
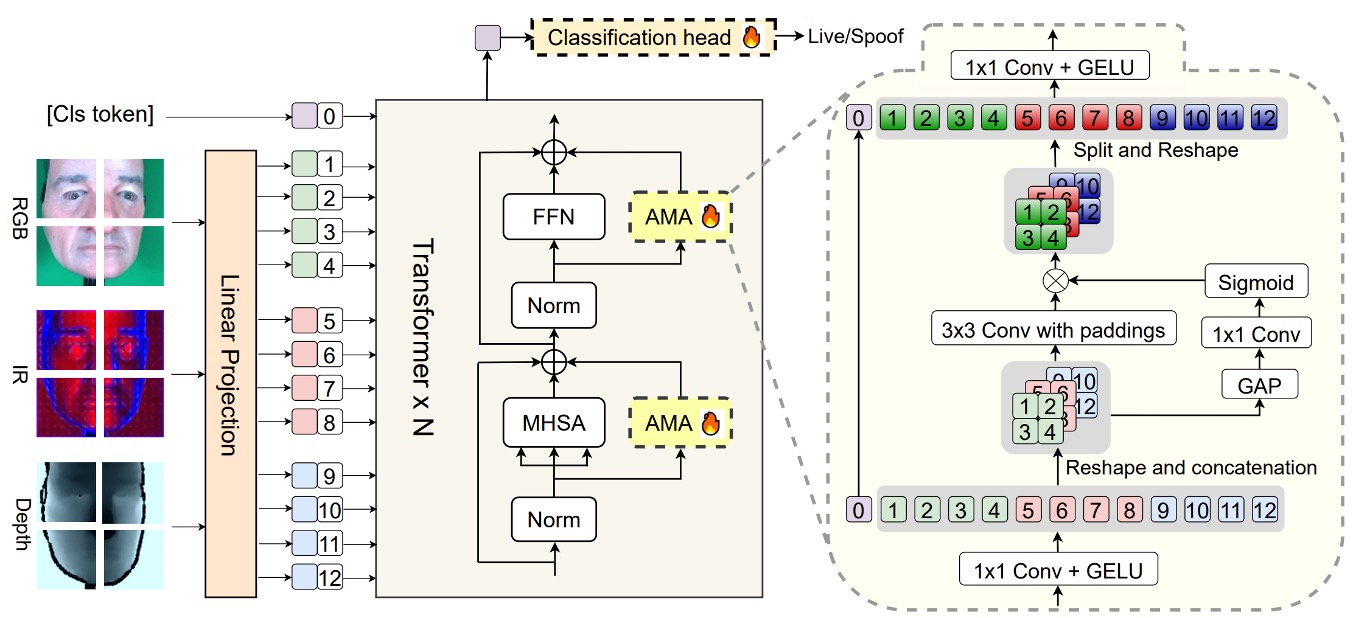
主幹是一個 預訓練的 ViT,整體結構被有意設計為 高凍結、低微調:
- 只有最後的分類頭 和額外插入的模組 AMA(Adaptive Multimodal Adapter) 參與訓練,其餘的 ViT 結構完全保留原貌。
AMA 的角色就是個 Adapter,讓原本只會處理單一模態的 ViT,變得可以理解多模態輸入(如 RGB、IR、Depth)。
如果你對 Adapter 的概念不熟悉,可以參考我們其他論文筆記:
它的結構設計可以分為四個階段,如上圖中的 AMA 模組內部:
-
通道壓縮
每個模態的輸入 token,會先經過一層 1×1 卷積,將原始通道維度 壓縮為隱藏維度 。這個動作的目的是將資訊濃縮,為後續模態間的融合準備統一格式。
-
局部模態融合
接著,將三個模態壓縮後的特徵圖重新拼接為三維空間(batch, channel, height, width),透過一個 3×3 的 2D 卷積做空間融合。這步驟充分利用模態間的空間對齊特性,在保持原位關係的前提下進行特徵交互。
-
動態模態權重
為了讓不同模態的貢獻可以隨場景自動調整,AMA 使用 global average pooling(GAP)來萃取每個模態的全域資訊,再透過 1×1 卷積和 Sigmoid 函數輸出模態權重 。這些權重會對應地調節每個模態在融合輸出中的影響力。
-
通道回復
最後,透過另一個 1×1 卷積把通道維度從 擴回 ,並將這些融合後的模態特徵與經處理的 class token 組合起來,作為最終送入分類頭的 token 向量序列。
這樣的設計有幾個優點:
- 參數效率高:只微調少量參數,降低 overfitting 風險
- 模態融合精細:不像傳統直接 concat,多了一層動態加權與卷積融合
- 支援彈性模態組合:AMA 可在任意模態組合下運作(例如只有 RGB+IR)
換句話說,AMA 是一個低侵入性、高擴展性的模態融合模組,專為 ViT 的結構特色量身打造。它讓 frozen ViT 在不重訓底層的情況下,也能吃進高維度、多模態的 spoof 線索。
預訓練方法
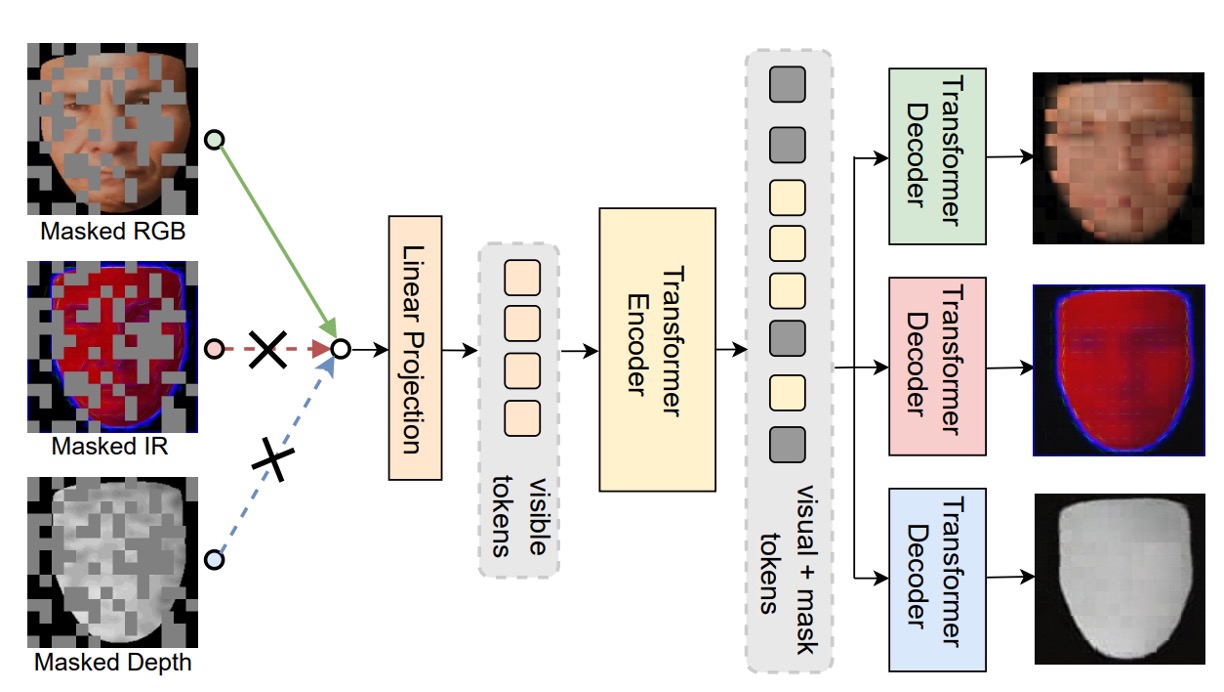
最後,作者針對 ViT 的預訓練流程也提出一個新的框架:Modality-Asymmetric Masked AutoEncoder,也就是本文的標題 M²A²E。
傳統的 MAE 會將整張圖切成 patch,隨機遮一部分,然後讓模型學著重建。但在多模態情境中,這樣的設計會有幾個問題:
- 遮的是全部模態的 patch,模型容易對某一模態過度依賴
- 模型的目標只是還原影像,並不一定有助於活體判斷這種「跨模態語意」的任務
於是 M²A²E 改變了 masking 與重建的邏輯:
- 每次只隨機選一個模態做輸入
- 對該模態的 token 做遮蔽
- 同時要求模型重建:
- 該模態被遮住的 patch(這是傳統 MAE 的部份)
- 其他模態的完整圖像(這是關鍵創新)
這個設計逼著模型學會「用一個模態去預測其他模態的樣貌」,也就是所謂的 cross-modality reconstruction。具備兩大優點:
- 對模態間的語意關聯建模能力更強
- 能捕捉到如「色彩失真」、「深度缺失」這類 spoof 線索
討論
實驗結果
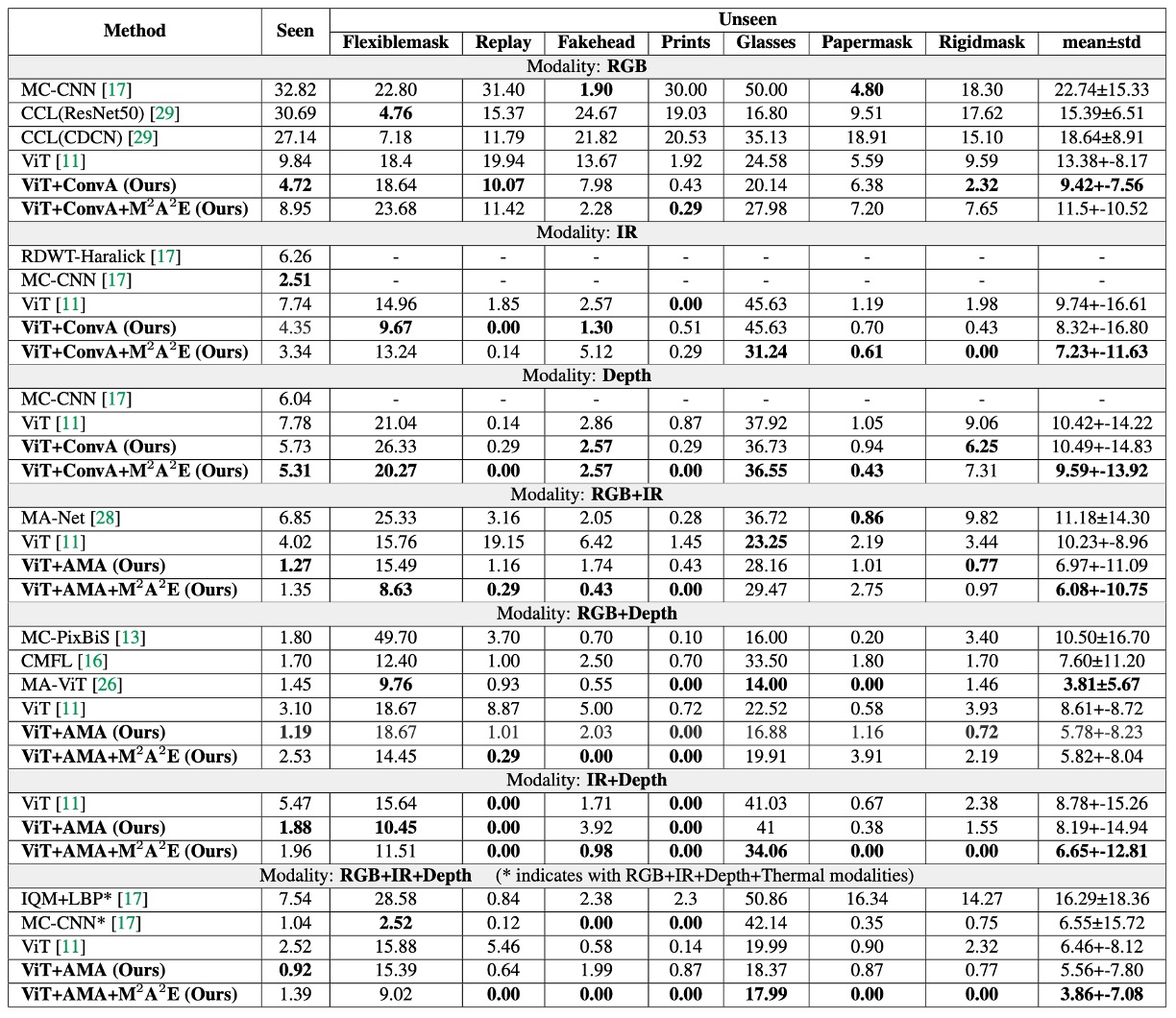
在 WMCA 的實驗中,作者設計了兩個情境:
- 一是模型已經看過攻擊類型(seen protocol)
- 另一是完全沒見過的新型攻擊(unseen protocol)。
上表正是測試這兩種情境下,AMA 與 M²A²E 所帶來的效益,可以從三個面向來解讀這張表:
-
AMA 的角色是「增強器」
相較於 baseline 的 ViT,加上 AMA 之後的模型,在所有模態設定下 ACER 都有明顯下降。即使在原始 ViT 只能處理 global 的 patch-level 注意力時,AMA 補上了局部與模態交互的不足,讓整體辨識能力更穩。
-
M²A²E 的角色是「泛化器」
在 unseen 攻擊的測試情境中,使用 M²A²E 預訓練的模型能比 ImageNet 預訓練的版本更穩定地面對未知的 spoof 攻擊,尤其在 IR 與 Depth 模態上效果特別顯著。這顯示它成功學到了一種可遷移的 spoof 特徵表徵方式。
-
RGB+IR+Depth 是全模態最強組合
最後一欄的三模態組合,AMA+M²A²E 所得到的 ACER,甚至優於使用四模態的 MCCNN 模型。這代表只要模態選得好、模組設計合理,就能用更少的感測器達到更好的效果。
更多實驗結果,請讀者參考原始論文。
Local Descriptors 是否有用?

這裡作者針對 IR 模態,測試了多組輸入特徵,包括:
- 單一描述子:LBP, HOG, PLGF
- 組合輸入:HOG+PLGF, LBP+HOG+PLGF, GRAY+HOG+PLGF
結果有幾個重點:
- LBP 最弱:不論哪一模態,LBP 的表現都落後其他特徵,可能是因為它太過簡單,不足以支撐 ViT 的高維建模需求。
- PLGF 穩定發揮:在 IR 模態中,即使單用 PLGF,就已經能打平甚至超越原始輸入。
- 組合最強,特別是 GRAY+HOG+PLGF:這組輸入在 IR 模態下表現最佳,不管是直接微調還是配上 ConvAdapter,都明顯勝出。
實驗結果表示 IR 模態本身對光線變化敏感,需要局部紋理與光照不變性的補強,而這些經典的 hand-crafted 特徵組合,確實能為 ViT 提供有用的細節。
AMA 是不是只是參數多?
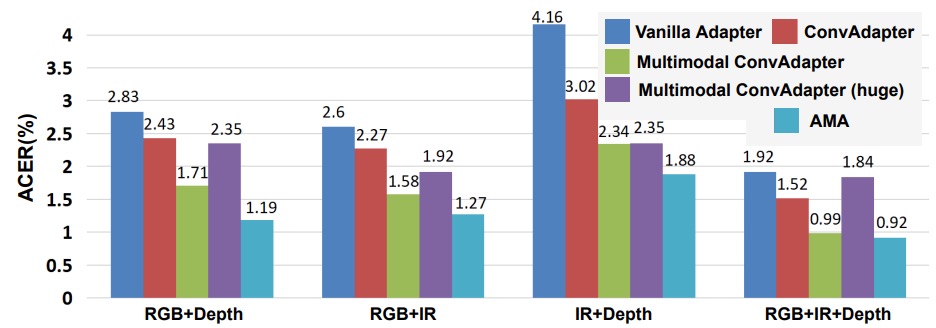
作者測試了五種 adapter 結構,看看哪一種設計最適合 ViT-FAS:
- vanilla adapter:全連接層(FC)為主
- ConvAdapter(單模態):用 2D 卷積取代 FC
- Multimodal ConvAdapter(壓縮版):融合不同模態的特徵,再做 2D 卷積
- Multimodal ConvAdapter(全維度):輸出維度保留所有模態乘積(D₀ × K)
- Adaptive Multimodal Adapter(AMA)
重點觀察如下:
- 從 FC 換成 Conv 的提升非常明顯,顯示局部感受野對 ViT 是補強而非干擾。
- 簡化的 Multimodal ConvAdapter 優於 單模態版,代表模態融合在 ViT 裡是可行的。
- 全維度版本反而 overfit,說明高維融合不見得越高越好。
- AMA 是這些方法中最平衡的,既保留模態差異,又能有效加權不同特徵來源。
因此,結論是 ViT 的模態融合要靠卷積,但不能無腦疊維度。而 AMA 的加權融合方式,是目前設計中的最佳解。
結論
我們經常在論文中看到 Transformer 被應用到新的任務上,但這篇文章的可貴之處在於,它並沒有急著往上疊架構,而是回頭問了一個更基本的問題:
「如果 ViT 是要用來做 Multimodal FAS,它該具備哪些特質?」
作者將這個問題拆成三個面向來看:輸入的細節設計、預訓練的邏輯、以及微調的方式。這種做法對於資料量有限、攻擊樣態多變的 FAS 任務來說,顯得特別有價值。