[24.06] HPDR

雙曲的世界樹
我們來看一篇 CVPR 的論文。
作者用一個非常新穎的角度,來試著切入 FAS 的問題。
定義問題
人臉辨識系統的防護網,建構在 FAS 之上。
隨著深度學習的成熟,研究的進展有目共睹:從早年的手工特徵,到後來的深度二分類架構,再到近年的跨域學習技術,FAS 正一步步學會如何從混亂中認識風險。
但是,一但資料集換了或場景變了,模型的能力就會急劇降低,屢試不爽。
後來研究者試著教模型「學會泛化」,引入對抗、解耦、對比、元學習等各種訓練策略,試圖讓特徵在不同場景中達到一致。
但在這個過程中,有一件事在不知不覺中被犧牲:語意的結構性。
所謂結構性,並不是網路結構本身,而是樣本之間的「語意距離」與「階層脈絡」:
- 一張彩色印表機印出的照片,與一段手機錄影重播的影片,或許在像素分布上接近,但它們背後所代表的攻擊類型與行為機制卻天差地遠。
- 一場攻擊的生成條件,包含光線、背景或材質等,本質上是對樣本語意屬性的切分,而不是雜訊。
可是現有方法大多將所有樣本強行嵌入同一個「歐幾里得」特徵空間中,並以最小化 domain gap 為優先目標,導致過度對齊(over-alignment)。
我們將本該分離的特徵捏在一起,把模型原本可能理解的結構,壓縮成一塊沒有層次的平面。
這也太奇怪了吧?
因此,這篇論文的作者認為:
既然泛化的困難來自語意的失衡,那麼,我們能否換一個空間,讓階層自己說話?
解決問題
數學警告,這篇論文的方法論略為艱澀,請讀者斟酌服用。
為了修補語意結構被壓縮的斷層,這篇論文提出了一種嶄新的方法論:
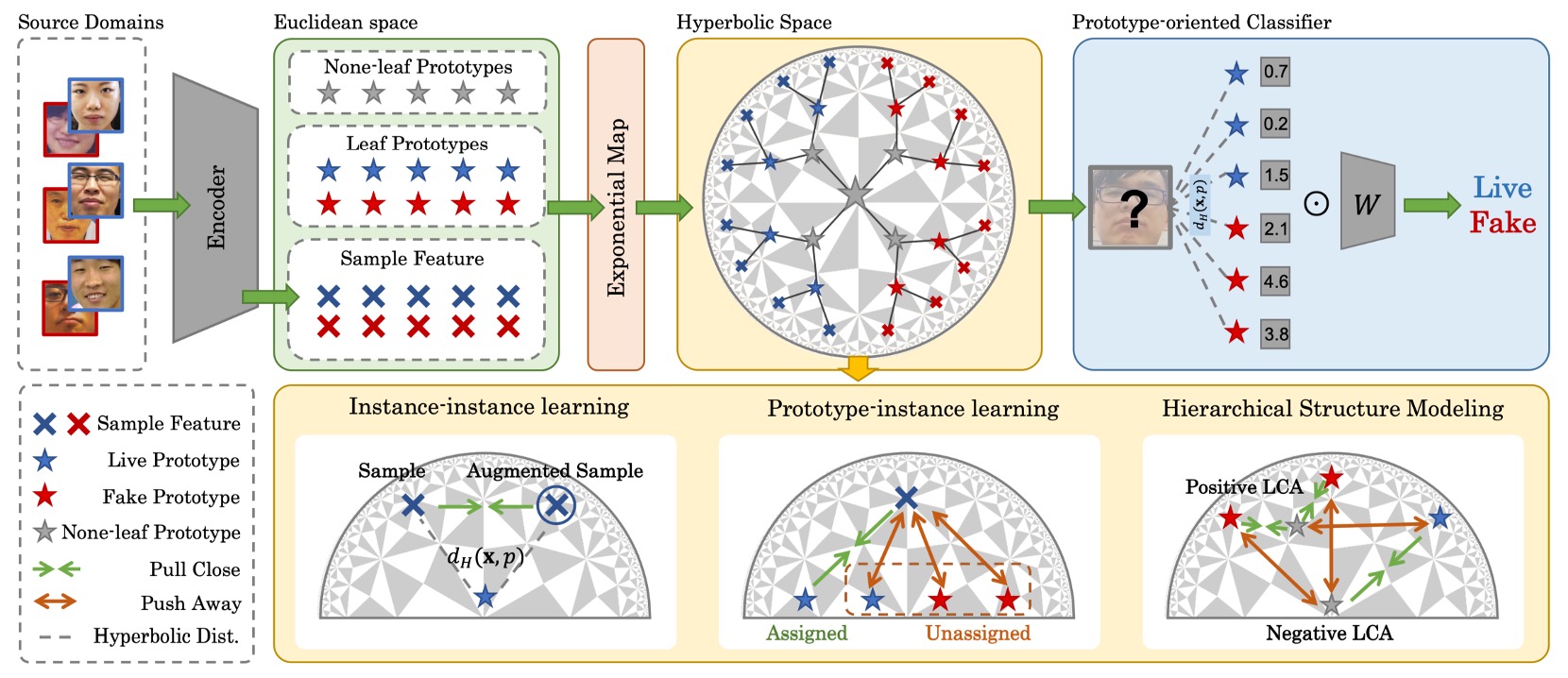
- Hierarchical Prototype-guided Distribution Refinement(HPDR)。
整體來說,HPDR 建構在三個核心之上:
- 在雙曲空間中嵌入特徵,捕捉其內在的階層結構;
- 以原型學習(Prototype Learning)作為語意座標系,讓樣本與語意聚點形成關聯;
- 透過多層對齊與優化策略,逐步逼近一個可泛化的語意分布。
首先,我們從這個空間本身開始看起。
雙曲空間
若語意有樹狀結構,那麼雙曲空間就是幾何上的精準選擇。
我們可以想像一棵語意之樹,從「攻擊」與「真實」分出主幹,再根據材質、呈現方式、來源設備不斷分枝展葉。如果我們硬是將這棵樹壓進一張平坦的歐幾里得地圖上,會發現它的枝節被扭曲、重疊、無法展開;但在雙曲空間裡,它反而能自然延伸,彼此避讓,甚至在邊界上無限繁生。
HPDR 採用的正是這樣一個空間模型:Poincaré Ball Model。
Poincaré Ball 是個概念上的空間:
這表示,所有點都被包裹在一個半徑為 1 的開球體中。
乍看之下像是個封閉的結界,但這個球體的邊界其實不是盡頭,而是無窮遠。
這表示我們可以逼近邊界,卻永遠無法觸及。
這樣的設計有一個關鍵特性:愈靠近邊界的點,彼此之間的距離會呈非線性膨脹,也就是說距離本身就帶有語意層級的張力。
為了讓這個空間具有計算能力,我們不能再使用傳統的歐幾里得度量,而是引入一組由曲率控制的黎曼度量張量(Riemannian metric):
- :這是我們熟悉的平面尺規。
- :這是一個隨位置變動的縮放因子(conformal factor)。
當你靠近中心, 接近常數,整體幾何行為近似平面;但當你靠近邊界,, 發散,整個空間突然變得「張力極大」,使得距離稍有偏移就被極度放大。
這正是雙曲空間的本質:讓層級擴張得以自然展開。
要在這種幾何裡移動,我們不能再使用線性加法,而必須轉向 Möbius 加法:
這種加法並不是我們熟悉的向量疊加,而是沿著彎曲空間的邊界推進。任何移動,都會根據目前所在位置的曲率,改變意義與方向。
而點與點之間的距離,則由雙曲距離給出:
這條距離公式,是對「語意分歧」的幾何化詮釋,關心的是向量之間是彎了多少、分了多深,而不是傳統意義上的「距離多遠」。
有了雙曲空間之後,下一個問題就是:
- 我們該如何把神經網路的輸出進行映射?
由於神經網路輸出的特徵仍然是歐幾里得向量,我們必須找到一個合理的方式,將它們映射進雙曲空間。
這一步由指數映射(Exponential Map)完成:
這個操作有兩個效果:
- 長度短的向量:被壓在球心附近,表示高層次的語意
- 長度長的向量:被推出球邊緣,表示細分的語意葉節點
由於語意本來就不是線性的,因此這個過程可能更適合語意的真實分布樣貌。
語意錨點
雙曲空間準備好了,接下來,語意要在哪裡長出來?
在 HPDR 中,作者不是讓模型直接對所有樣本進行「端到端」的特徵分類,而是先給它一個穩定、可控的語意架構,這就是所謂的「原型」(Prototype)設計。
原型不只是點,而是一種語意聚集的承載單位。
- 它的座標位置,會決定樣本怎麼被歸類;
- 它之間的距離,會形塑整個語意空間的分布。
首先定義最基本的一組原型,稱作 葉節點原型(Leaf Prototypes),它們是直接對應樣本的語意聚點,具有明確的標籤資訊。
在數學上,定義如下:
- :類別索引,0 表示 fake,1 表示 live;
- :該類別中第 個原型,共 個;
- 所以總共有 個 leaf prototypes,分別對應兩類樣本的語意子群。
這個設計隱含了對一件事的假設:同一類別中的樣本,其實可以被劃分為多個語意亞型(sub-type),而這些亞型,就是由不同的 leaf prototype 來對應。
理論上,我們希望這些原型初始化在雙曲空間中,但實務上直接在 上初始化容易導致梯度爆炸或優化不穩。因此,作者在這裡的實際操作是:
- 在歐幾里得空間 隨機初始化原型向量
- 再透過前述的指數映射,將其送進雙曲空間:
這個設計可以讓初始化更穩定,訓練初期也能避免過度分散或塌縮的現象。
接下來是整體結構設計中最有意思的部分:None-leaf Prototypes。
這些原型並不對應任何單一樣本,而是存在於 leaf prototypes 之間,作為它們的共同祖先與語意連結節點。
定義如下:
- 這些原型也嵌入在 中,但不帶任何標籤資訊;
- 它們的存在是為了建構語意之樹的內部節點,模擬語意層級之間的過渡與收斂。
也就是說:
- Leaf Prototypes 負責聚合樣本 → 建立語意對應;
- None-leaf Prototypes 負責聚合原型 → 建立層級結構。
這套設計的美感在於:它將無監督的語意層級建模,嵌入進了分類架構之中。
我們不用顯式標註哪個子群屬於誰,只需讓模型自己去發現,哪些原型彼此接近、哪些原型有共同祖先,哪些祖先其實應該更靠近邊界、哪些應該停留在中心。
語意的三層對齊
有了雙曲空間和原型,接下來就是要建構一個可學習的系統。
這部分的設計稱為 Hyperbolic Prototype Learning(HPL),是一組針對語意三層關係設計的學習架構:
- Prototype ↔ Instance:點對點的語意對齊
- Instance ↔ Instance:樣本間的內部一致性
- Prototype ↔ Prototype:語意結構的層級建構
下面我們逐一來看一下:
-
Prototype-based Feature Alignment
先從最基本的一步開始,讓樣本找到自己的語意錨點。
對於每個樣本的特徵向量 ,我們根據其標籤 ,在該類別下的 leaf prototypes 中找出與其距離最近者:
這樣,就可以為每個樣本建立「正對應的原型」。
接下來,我們希望模型學到的特徵能夠自動靠近這些原型,同時遠離非對應原型,這就是對比式學習在雙曲空間中的運用:
這個損失讓模型在語意空間裡自行判斷哪些樣本應該靠近,哪些樣本應該遠離。
此外,為避免所有樣本都指派給同一個原型而產生 collapse,訓練中會控制每個 mini-batch,讓每個原型都要被平均指派樣本,讓空間保持多樣性與分佈張力。
-
Instance-based Consistency
由於現實中的樣本並非靜態存在,它們會因光線、角度、遮蔽等外部條件而出現不同的擾動。我們希望模型能學到這些樣本中與語意真正有關的訊號。為此,HPL 引入了樣本一致性學習:
給定一對樣本 ,我們分別取其特徵為 ,要求它們在語意空間中保持一致,在特徵層級,兩者的距離應盡量縮小:
其中 表示阻斷梯度,確保只調整 ,穩定 anchor 特徵。
在語意分布層級,它們對所有原型的距離分布應盡可能一致:
最終總損失為:
即使樣本樣貌改變,這組設計也會使其在語意結構中的定位不會漂移。
-
Hierarchical Structure Modeling
原型之間的關係,不能只是「平均分布」,它們應該彼此有遠近、有高下、有祖孫關係。
這就是 HPDR 中最具象徵性的一步:語意樹的自我生長。
為了學出這種結構,作者借用了來自層級分群中的 Dasgupta cost 概念:
其中 表示 的最低共同祖先(LCA),而 表示該子樹的葉節點數。這個 cost 本質上就是在問:語意相近的原型,能否在更低層級就收斂?
但由於 Dasgupta cost 無法直接優化,作者退而採用 triplet-based 優化策略,建構三元組:
- 正樣本: 為互為 KNN;
- 負樣本: 為與兩者皆不相近的原型。
接著,對每組 ,尋找使 成為 的 LCA 的 none-leaf prototype:
其中 是 Gumbel noise,用於近似 argmax 的可微操作。
然後,令 為 與 的共同祖先,並設計以下 triplet 損失:
此外,還需對 leaf prototypes 的分布做兩項結構性約束:
- 鼓勵所有原型遠離原點(避免塌縮):
- 鼓勵不同原型彼此分散:
最終,語意結構建模的總損失為:
語意的對齊,真正困難的地方在於讓點之間的關係也跟著長出樹來。
HPDR 的 Hyperbolic Prototype Learning,在一個非線性的空間中,讓分類變得像是語法解析,而非單純給予標籤。
訓練流程
訓練流程分為三個步驟:
-
Step 1:Prototype Initialization
首先在雙曲空間中隨機初始化:
- 所有 Leaf Prototypes(用於對齊樣本)
- 所有 None-leaf Prototypes(用於建構階層)
原型在空間中彼此分散,尚未帶有結構性,也未與樣本建立明確的對應關係。它們在這個階段中只是靜靜地存在,等待被樣本認領,等待從距離中長出語意。
-
Step 2:Prototype Assignment
樣本在這個階段被送進雙曲空間,開始尋找自己的語意錨點。
作者會根據樣本的標籤 ,將其特徵 指派給同一類別下、與之最接近的 Leaf Prototype。
-
Step 3:Prototype Optimization
一旦樣本與原型之間的關係確立,接下來便是整個系統的協同調整與語意對齊。
最終透過以下總損失進行優化:
這四項損失分別對應:
- 語意決策的穩定性()
- 樣本與原型的對齊程度()
- 樣本自身在增強下的一致性()
- 原型之間的層級與結構關係()
這一輪優化完成後,空間中的樣本與原型都發生了變化,原型位置微調,樣本嵌入收束,語意張力重新分配。
然後整個流程回到 Step 2,再次進行 Assignment,進入下一輪收斂循環。
實驗設計
為了驗證 HPDR 的泛化能力,作者使用常見的 OCIM 驗證基準。
為了讓整體架構具備可學性與可重現性,以下是模型實作的重要設定:
- 影像輸入尺寸:256×256(彩色人臉區域裁切)
- leaf 原型數量 :每類別各 20 個語意錨點
- none-leaf 原型 :建構語意層級的骨幹節點
- 特徵維度:256 維雙曲特徵空間
- 曲率參數 :對應雙曲幾何的空間彎曲程度
- 樣本配置:每個 domain 取 5 筆 / 類別,總 batch size 為 30
- 三元組中的正對應原型對:KNN 選擇前三名為正樣本
- 損失函數中的結構邊界
訓練使用 Pytorch 框架與 DepthNet 作為 backbone,並在 NVIDIA 4090 上進行,優化器採用 Adam,學習率為 0.001。
討論
OCIM Benchmark
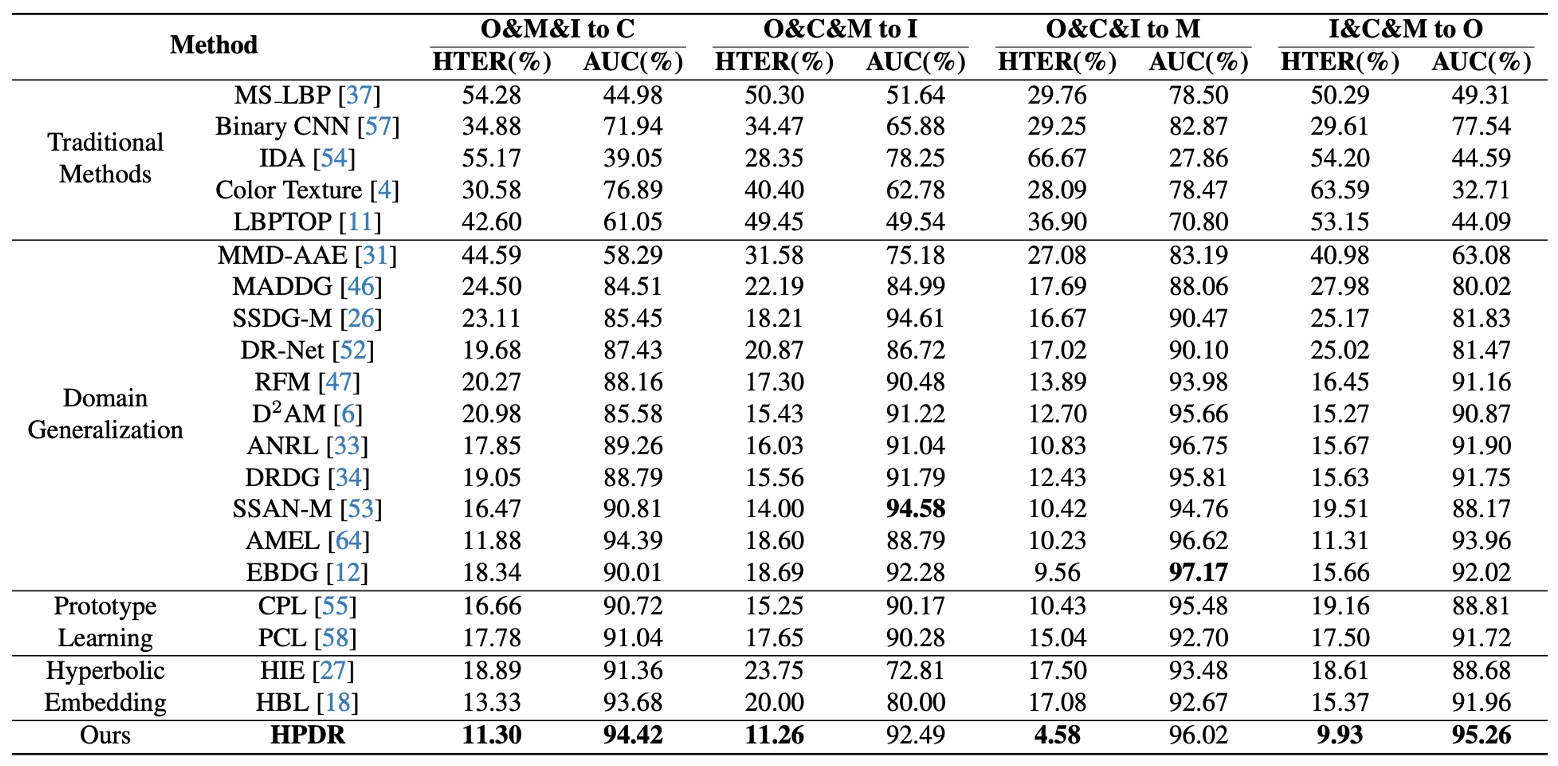
這幾乎是近年每篇論文的標配,任選三個資料集作為訓練來源,留下一個從未見過的 domain 作為測試集。
實驗目的是為了要模擬實際場景中「新設備、新光線、新環境」的挑戰。
實驗結果如上表:
- 所有 DG 方法表現皆優於傳統方法,說明 DG 策略確實有助於跨場景泛化;
- HPDR 明顯優於其他 DG-based 方法,甚至在未見過的測試集上仍保持低錯誤率;
特別值得注意的是:即使對手也使用 prototype 或 hyperbolic embedding,HPDR 依然勝出,因為 HPDR 不只是對齊樣本,而是建立了一棵有層次的語意之樹。
這裡的優勢來自於模型所內建的語法結構。 其他方法對齊的是點與點的關係,HPDR 對齊的是語意與語意之間的位置與層級。
Limited Source Domain
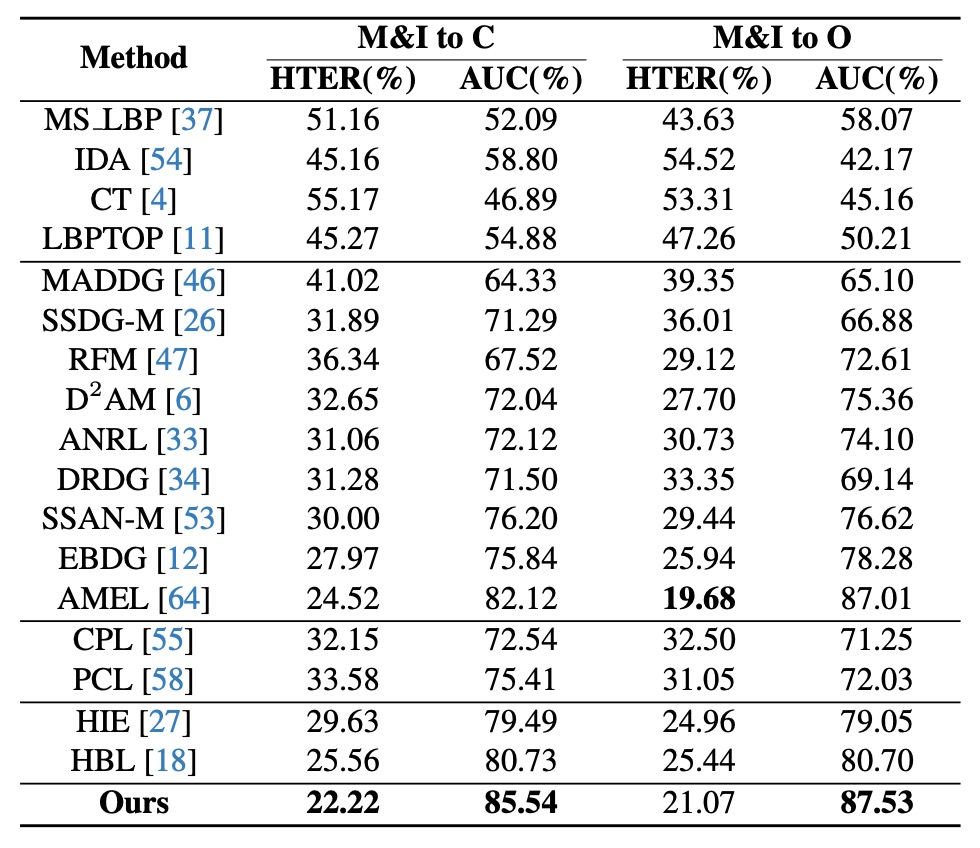
在這組測試中,作者限制僅使用兩個資料集(MSU 與 Replay)作為訓練來源,再在 OULU 與 CASIA 上進行測試。這更貼近實務中常見的情境,也就是樣本稀疏、domain 分布受限。
實驗結果如上表:相較於 AEML 等方法,HPDR 在 M&I→C 的設定中 AUC 提升 3.42%、HTER 減少 2.30%;同樣地,在 hyperbolic 與 prototype 方法中,HPDR 依然領先。
這證明即使樣本來自少數 domain,只要語意結構清晰,模型仍可對未知場景做出合理判斷。
HPDR 在這裡的角色像是一名視野清晰的地圖閱讀者,不依賴眼前的路線,而是靠內建的地形知識理解方向。
Cross-Attack

最後,作者在 HQ-WMCA 資料集進行 cross-attack 測試。
這個任務困難在於:訓練時排除某一攻擊形式,測試時僅用該攻擊類型做驗證,考驗的是語意轉移的穩健性。
實驗結果顯示 HPDR 在所有攻擊類型中皆維持較低 ACER,相比於其他方法,HPDR 在「新攻擊」出現時依然表現穩定。其原因在於:這個方法並非僅學會判斷某一類型的攻擊,而是學會如何在語意空間中辨別「這是不是一個熟悉的分布」。
換言之,模型不是學會了辨識「這張臉有沒有化妝」,而是學會了判斷「這張臉的整體語意,是否合理地存在於已知的語意結構中」。
誰是語意空間的關鍵?
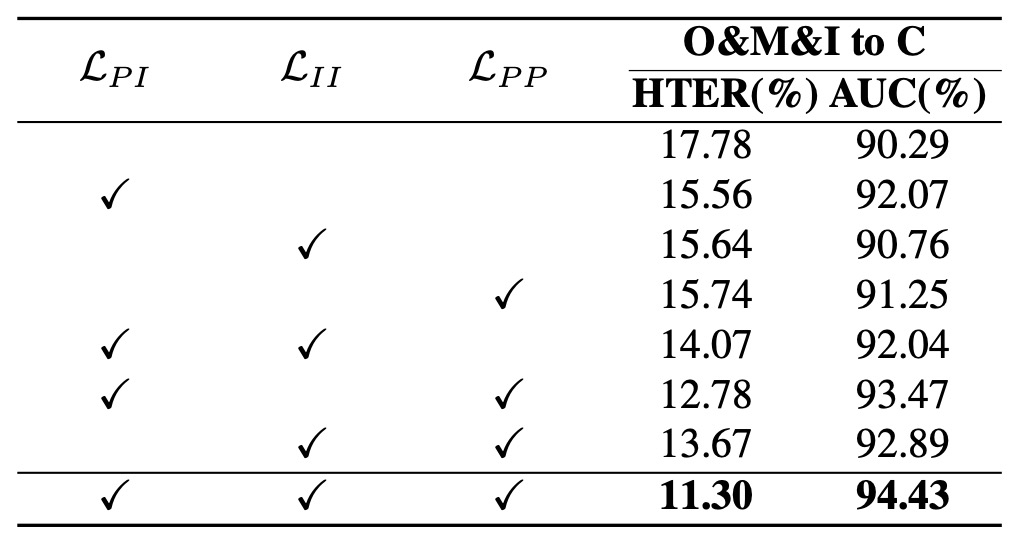
根據實驗結果,我們可以得到幾個觀察:
- 完全不加損失時,模型表現最差(HTER 明顯升高):代表光是進入雙曲空間並不足以提升性能,空間需要結構性的監督訊號。
- 單獨加入 (Prototype-instance 對齊)後,性能大幅提升:顯示樣本與語意原型之間的對應,是形成穩定嵌入空間的第一要素。
- 加入 後再次進步:證明 prototype 間的層級建構,讓空間不只穩定、也更有層次性。
- 全損失開啟時效果最佳:印證了 HPDR 的設計邏輯是協同的,不是線性堆疊,而是語意語法的立體拼圖。
結論是空間本身不能保證結構,結構需要一套多層次的關係來維繫,從對齊、到一致性、到層級邏輯,缺一不可。
語意之樹該長出幾根?
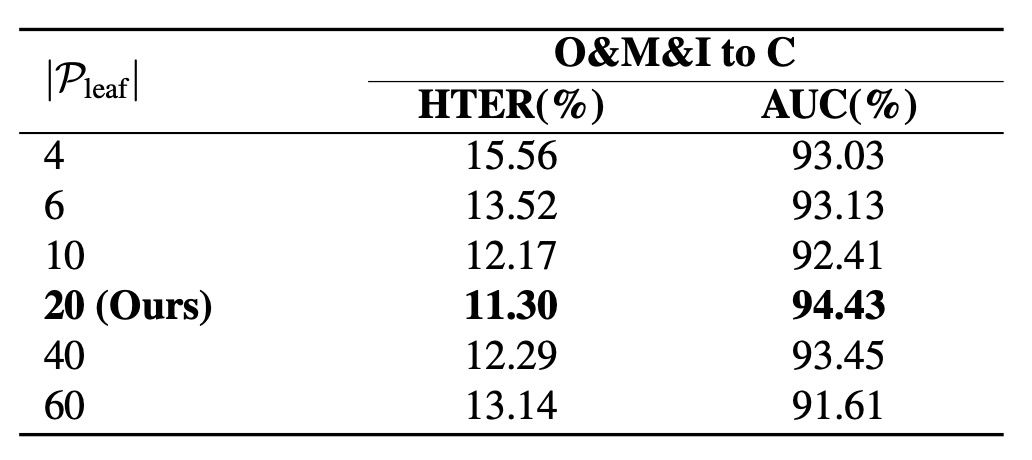
作者測試不同的分支數量,原型數量從 4 增加到 20,性能穩定提升。但超過 20 後反而出現過擴張效應:空間過度稀疏,語意分布反而不穩。
同時,原型過多也會造成 mini-batch 資源分配不均,導致 trivial assignment,因此在本實驗設定下,每類 20 個原型是「最小冗餘、最大表達力」的最佳配置。
語意空間該多彎?
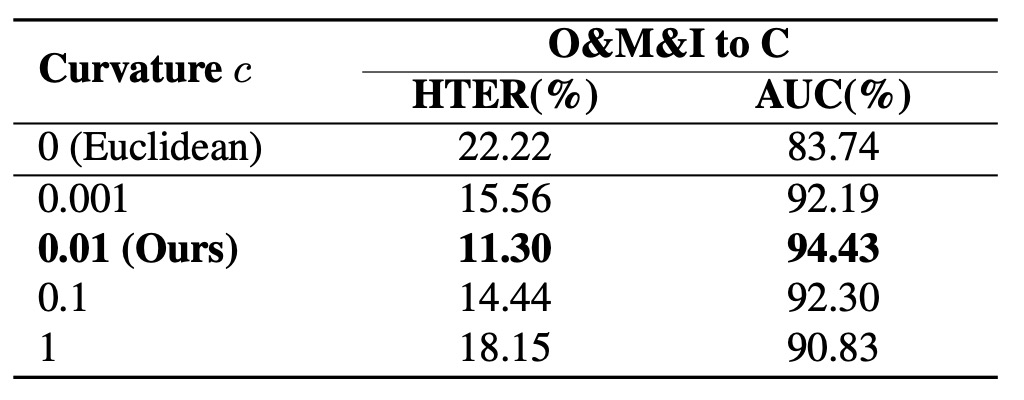
實驗結果如上表,我們可以看到幾個關鍵:
- 歐幾里得空間()效果最差:語意層級難以展開;
- 曲率 由小增加至 0.01 時性能提升:代表語意層級開始清晰;
- 當 過大,性能反而下降:因為 exponential map 以 為 base point,當空間扭曲過劇,近似失真,語意也就失衡。
因此,雙曲空間不是越彎越好,而是要剛剛好,必須讓語意之枝能自由生長、又不至於迷失方向。
可視化結果
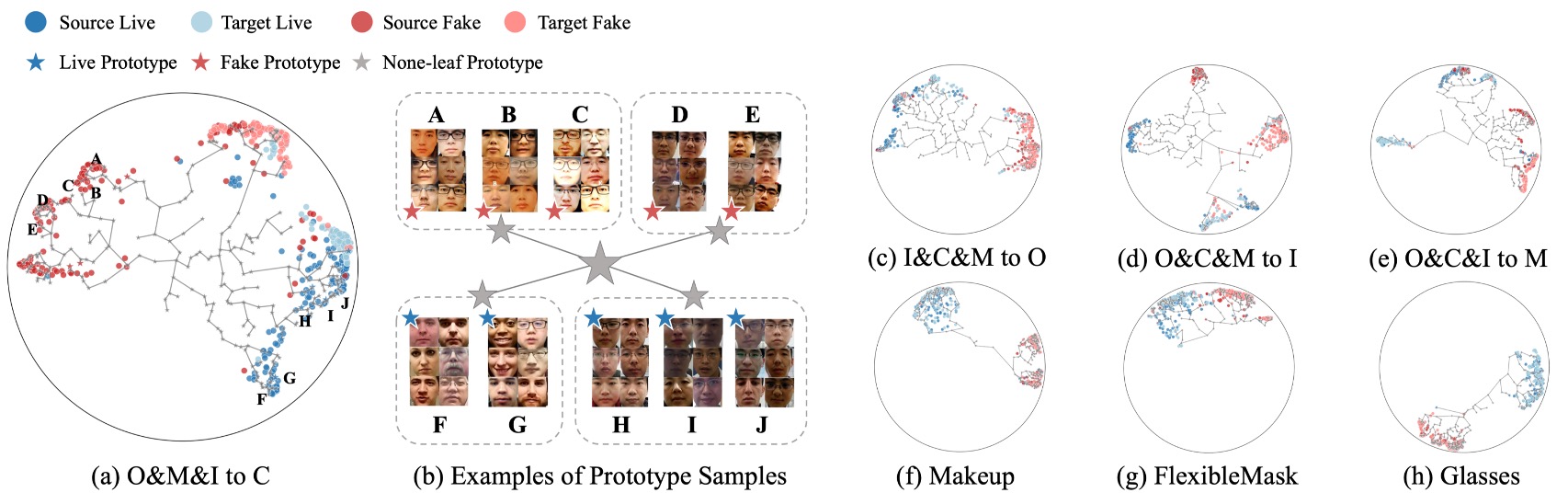
最後,作者以 Leave-One-Out 與 Cross-Attack 任務為背景,將 HPDR 所學出的語意空間進行可視化。
上圖中展示了不同測試設定下的特徵分布圖,每張圖中:
- 樣本顏色表示其類別或來源 domain;
- 位置則對應於雙曲空間下的嵌入結果;
- leaf prototypes 與 none-leaf prototypes 則標註為特定點位或階層節點。
從圖中可以觀察到幾個重點:
- 語意分布不是雜亂擴散,而是層級式地展開,樣本自動圍繞各自語意原型聚集,並依語意近似程度構成樹狀結構;
- none-leaf prototypes 的引入,是語意收束的關鍵,它們成為多個語意子群的收斂點,使空間不會因過多原型而碎裂;
- 跨 domain 或跨 attack 的樣本能自然嵌入原有結構中,說明模型學會的不是某個 domain 的表面分布,而是整體語意的邏輯拓撲。
在上圖 (b) 中,作者將每個 leaf prototype 對應的樣本分別可視化,並用圖像群組呈現,可以發現:
- 不論來源 domain,同一個原型下的樣本極度相似;
- 共享 LCA 越低的原型,其樣本間的語意一致性越高,這說明層級是語意一致性的幾何反映,而非分類結果的附加說明。
這個視覺化結果表明:即便我們從未告訴模型要學結構,它仍自然學會了語意的層級分化。
結論
本研究的核心思想不在於記住更多樣本,而在於構築一個能容納語意層級的空間邏輯。
作者透過大量實驗與可視化分析驗證了 HPDR 的有效性。無論是面對未知場景、有限來源、還是新型攻擊,皆展現出優異的泛化能力,並證明結構性建模能顯著提升跨場景辨識的穩定性。
近年流行將自然語言的能力融入 FAS 架構,如果未來我們將將語意樹概念和自然語言相結合,或許能看到另外一種截然不同的語意之樹也說不定。