[23.01] DiVT

全明星錦標賽
Domain Invariant Vision Transformer Learning for Face Anti-spoofing
難得看到一篇論文的作者群可以把臺灣前幾所大學都掛上號。
台大、成大、清華、高師大......恩?還有玉山銀行。
定義問題
我們在上一個章節講了大量關於 Domain Generalization 的內容,這篇論文作為銜接的橋樑,把 DG 的概念從 CNN 架構上延伸到了 Transformer。
新時代的架構會繼承前人的意志,繼續走下去。
回顧現有的 DG-FAS 解法,大致可以整理成兩個方向。
第一種,嘗試讓「真臉」彼此靠近。
不管來自哪個 domain,真臉都應該共享某種內在的活體樣態。在 feature space 中,這些來自不同世界的真實樣本,被集中到同一個語意團塊。這種作法的關鍵,是建立一種跨場景的穩定錨點。
第二種,針對「攻擊類型」進行拆分。
不同攻擊方式有不同的偽裝策略,也會帶來不同的視覺特徵。這些特徵在學習過程中被推開、分離,避免模型混淆、誤判。
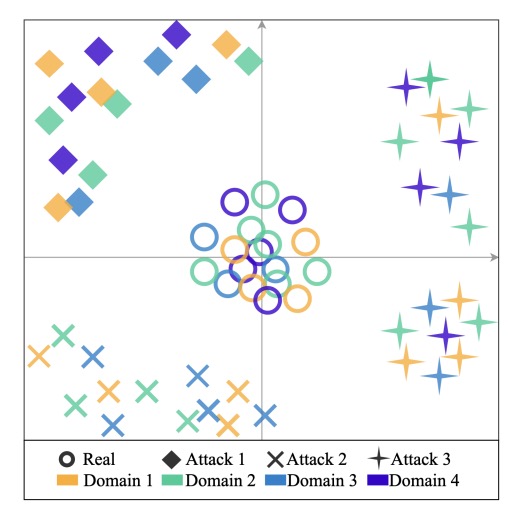
於是整個特徵空間呈現出這樣的形狀:
- 真臉集中在中心,作為對齊的核心。
- 各種假臉則分散在邊界,彼此區隔。
實作上,這些方法多半還是建構在 CNN 架構上,例如 SSDG 用單邊對抗學習讓真臉特徵更穩定,ANRL 修改 normalization 邏輯以抗 domain shift,SSAN 則拆出風格與內容,進行跨域對比學習。也有像 FGHV 這樣的生成式方法,用高斯分布假設來逼近真實樣貌。
設計精巧,成效可觀,但背後總帶著複雜的學習機制與高昂的資源成本。
而所有這些努力的前提,是一個共同假設:
模型從未見過目標 domain 的任何資料。
這樣的條件雖然苛刻,卻也更接近實際應用。現實世界不會等你蒐集完所有變數,它只會直接丟出一個從未出現過的例外情況,讓你的模型立即給出答案。
這正是為什麼有人開始將目光轉向 Transformer。
相比 CNN,Transformer 擁有更大的感受野、更靈活的關聯建模能力,在跨域學習這種充滿長距離語意變異的場景裡,理論上更具優勢。
可是目前用於 FAS 的 Transformer 嘗試仍然有限,有的直接套用 ViT,有的只拿來當教師模型,學生端還是回到 CNN。多數設計也沒有針對 domain generalization 做出專門調整。
那麼,如果我們想要設計一個真的能跨域泛化的 Transformer,該從哪裡開始?
解決問題
這篇論文的核心主張其實很簡單:
用一個輕量但足夠聰明的 Transformer 架構,把「真實」拉在一起,把「攻擊」分開。
模型架構
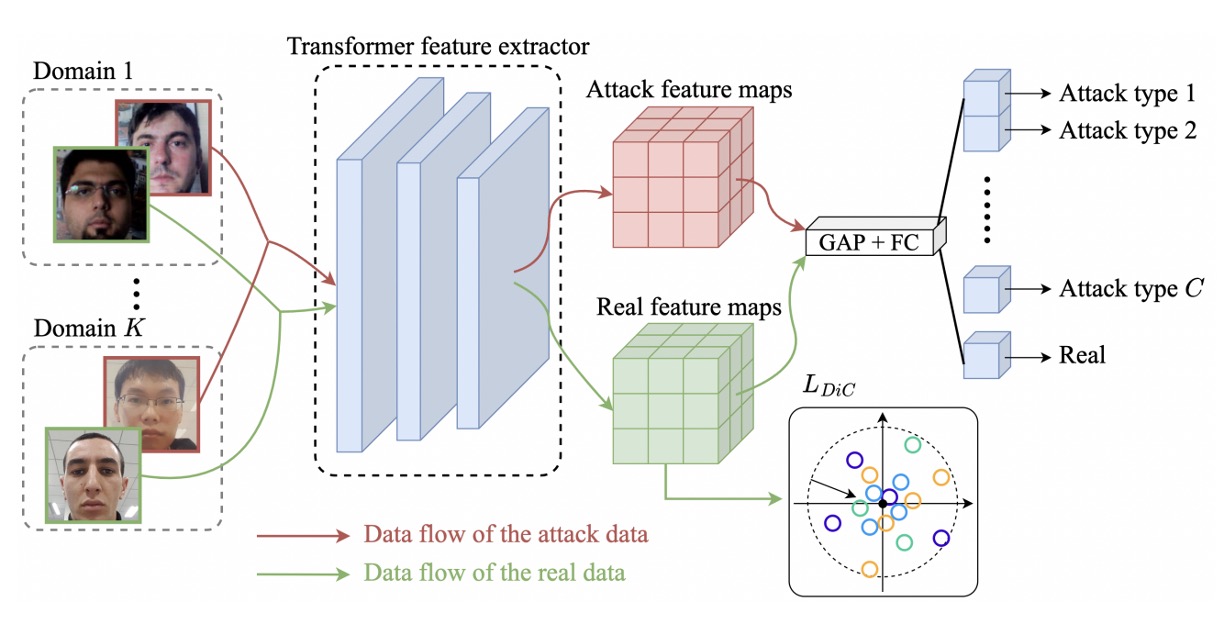
整體方法建立在 MobileViT 之上,這是一種結合 CNN 與 Transformer 的混合型架構。
不知道 MobileViT?你可以參考我們之前讀過的筆記:
MobileNet-v2 負責初步的下採樣與特徵抽取,MobileViT block 則以局部卷積與全域注意力串接,讓模型能同時捕捉臉部細節與全局結構。這種設計同時兼顧效率與表示力,適合部署在資源受限的場景中。
跨域泛化的第一步,是讓模型在「不同場景的真臉」之間取得共識。
假設我們有來自 個 domain 的資料集 ,每個資料集中都有真臉與若干種類的攻擊樣本。
作者把所有真臉合併為:
接著,透過 Transformer backbone 將這些樣本映射到特徵空間,得到一組嵌入向量:
作者的做法,是直接把原點 當作真臉的中心,設計一個簡單的 -norm 損失,將這些特徵盡量拉向原點:
這個想法來自於 Center Loss,但不同的是,我們不需要動態更新中心點,也不需要為每一類別分配一個 center。因為在這個設定下,真臉只有一類,攻擊則不預設數量或類型。
概念上可以參考下圖,不同 domain 的真臉被集中在空間中心,而非沿著某一個 domain 軸線分散,其餘的攻擊樣本則不予理會。
拉近真臉之後,下一步是推開假臉。
針對每一種攻擊類型,我們將來自不同 domain 的資料合併成一個類別:
然後加上一個分類頭,對輸入樣本進行 類分類(真臉 + 各種攻擊)。
這裡的 cross-entropy loss 為:
其中 是 one-hot 標籤(c=0 表示真臉),而 是模型對每類別輸出的 softmax 結果。
這層分類器的任務不只是為了「辨識」攻擊類型,更重要的是在 latent space 中進一步撕開真偽樣本的空間配置。這樣做的好處是讓攻擊樣本彼此分散,同時與真臉保有距離,強化跨 domain 的解耦能力。
最終的損失函數為兩者加權組合:
推論階段僅使用分類頭中對真臉的預測機率作為輸出,不需額外模組。
整體方法不引入對抗學習,也不倚賴風格拆分或特徵生成,只靠兩個直觀的目標函數與一個可輕量化的架構,就能實現穩定而有效的泛化效果。
討論
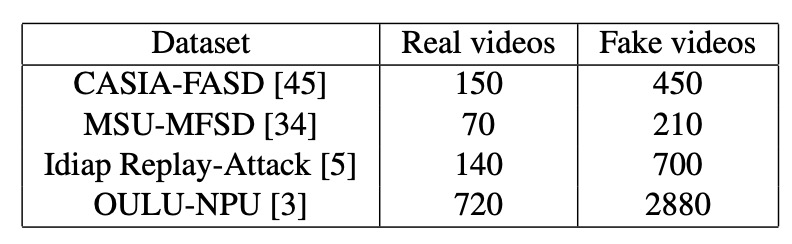
作者使用了四個常見的 FAS 公開資料集進行測試:CASIA-FASD、MSU-MFSD、Replay-Attack 與 OULU-NPU。
這些資料集各自來自不同拍攝裝置、攻擊手法與照明條件,具備明顯的 domain 差異,對於評估泛化能力來說,是一組具有代表性的測試場景。
根據 DG-FAS 的慣例,Replay-Attack 與 OULU-NPU 的訓練與測試集會分開使用,不用驗證集;其他資料集則全數納入實驗。
這些資料集中包含的真實與攻擊影像數量彙整於下表,建議讀者先掃過這張表,理解資料比例與數據密度的差異,這將有助於後續對比各模型的表現。
評估指標採用兩個常見指標:
- HTER(Half Total Error Rate):越低越好,表示模型在不同類型錯誤間達到良好平衡。
- AUC(Area Under the Curve):曲線下面積,越高越穩定。
實作細節
所有影像都經過 MTCNN 對齊與裁切,統一調整至 。
模型選用 MobileViT-S 版本作為 backbone,搭配 ImageNet-1K 預訓練,優化器使用 Adam,學習率 ,weight decay 設為 。 兩項損失函數的平衡係數 λ 設為 0.2。
Leave-One-Out 測試結果
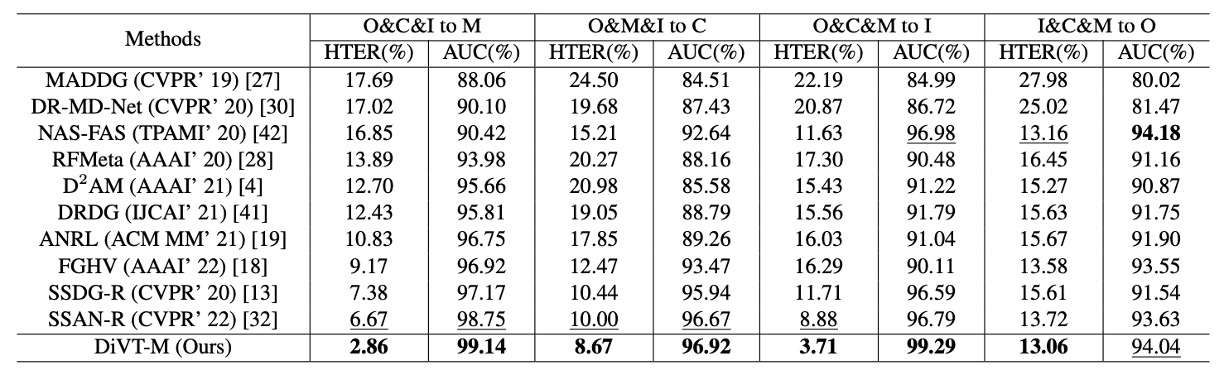
在上表中,展示了 leave-one-out 設定下的表現。這種設定會將四個資料集中的三個作為訓練來源,剩下那一個資料集作為測試集,模擬模型遇到全新 domain 的狀況。
大多數方法都為 frame-based,這篇論文的方法也是如此;唯一的例外是 NAS-FAS,它是基於影片訊號,理論上具有額外的 temporal cue。
在這個嚴苛的測試中,DiVT 在所有設定下的 HTER 均優於現有 SOTA 方法,其中有兩個測試組合甚至改善超過 3%。
唯一一次未能奪冠的是 AUC 指標中的 I&C&M to O,此處 NAS-FAS 略勝一籌。但該方法為影片級,與純影像級的方法相比,屬於不同層級的比較。
小樣本設定
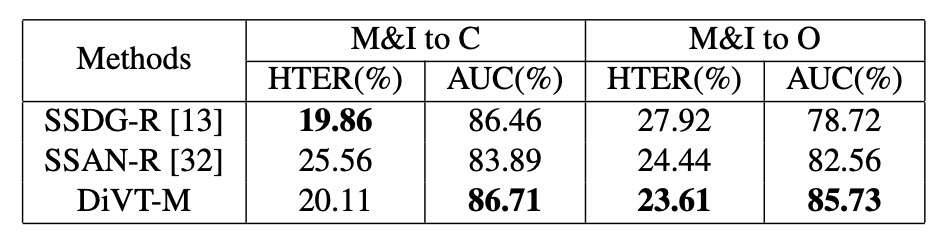
除了常規 leave-one-out 外,作者也測試了 有限訓練資料設定,僅使用 MSU-MFSD 與 Replay-Attack 作為訓練來源,其餘作為測試集。
這類設定更接近實際部署時的資料困境。
對比 SSDG-R 與 SSAN-R 等強化版 baseline,上表顯示 DiVT 在大多數情境中仍保有優勢,尤其在 AUC 指標上表現一致穩定。即使在某些 HTER 指標中略為落後,整體仍展現優越的抗 domain 偏移能力。
消融實驗
接下來的分析,聚焦在三個問題上:
- 不同 Transformer 架構的表現差異有多大?
- 我們設計的兩個損失函數到底幫了多少忙?
- 如果換成別種分類邏輯,結果會更好還是更差?
不同架構的對照結果
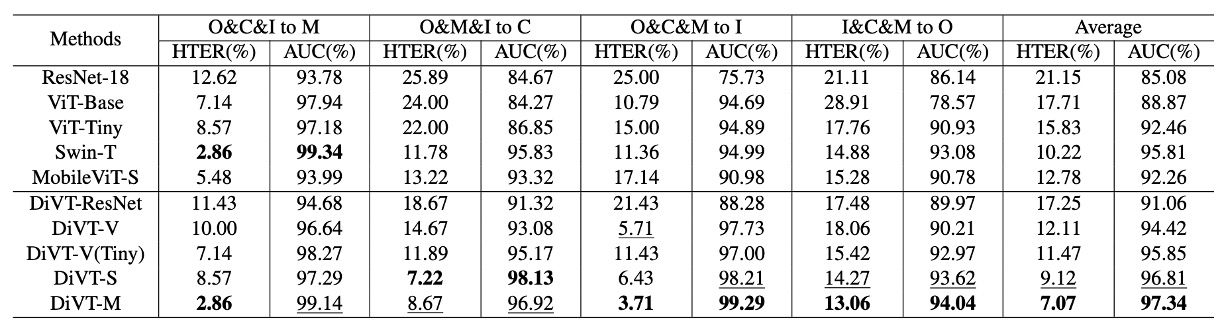
結果如上表,上半部是各個架構在僅使用 binary cross-entropy loss 下的表現,下半部則是搭配我們設計的 loss 後的結果。
我們可以看到幾個關鍵差異:
- Transformer 架構(DiVT-V/S/M)普遍優於 CNN(ResNet-18),顯示在跨域任務中,全局注意力與長距離依賴特徵比局部卷積更具優勢。
- 在所有 Transformer 中,MobileViT(DiVT-M)表現最佳。它既能保留局部特徵,又能整合全域關係,而且模型小、學得快,非常適合現實場景。
- ViT-Base 表現最差。作者推論,這可能是因為 ViT 缺乏對 local pattern 的建模能力,而且參數量太大,不適合資料規模有限的任務。
- 當架構換成 ViT-Tiny,結果就好多了,這進一步證實了「模型大小需與資料規模匹配」這件事。
MobileViT 的成功也再次印證一件事:卷積不是沒用,而是應該在對的地方出現。
Loss 組合的效益

接著作者測試了我們方法中兩個核心損失函數的搭配組合(DiC loss 與 DiA loss),分別比較單獨使用、都不使用、與同時使用的效果。
觀察發現:
- DiA(分類損失)是主要貢獻者,平均提升 AUC 約 3.7%。
- DiC(拉近真臉)也帶來穩定提升,約 1.3% AUC 增益。
- 兩者搭配時效果最佳,證實「空間集中」與「語意分離」的策略能互補協同。
改變分類邏輯會更好嗎?

作者也探討了分類任務本身的設計是否影響結果。除了二元分類(real vs fake)之外,另外測試了:
- 按 domain 分類(real + 各 domain 的 spoof)
- 按 attack type 分類(real + 各種攻擊類型)
- domain 與攻擊的組合分類
結論很明顯:attack type 分類效果最好,其他則容易導致過擬合或模糊化。
這驗證了 DiVT 方法中「統一真臉、拆分假臉」的空間策略比傳統 domain-label based 設計來得更穩定。
如果加上 adversarial loss?

有些人可能會問,那為什麼不加上 SSDG 或 SSAN 的 adversarial loss?
實驗發現,加上 adversarial loss 並沒有帶來顯著效益,有時反而略差。推測原因可能是:
- DiVT 的特徵空間已經足夠穩定,無需額外競爭
- Transformer 在 adversarial learning 上的最佳實踐仍未成熟
計算資源比較
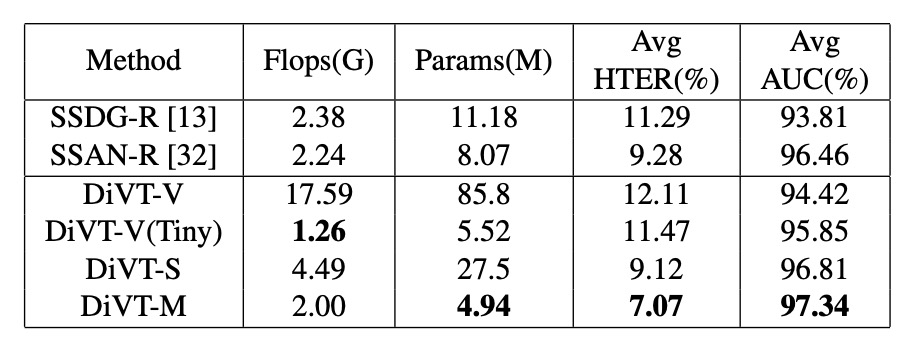
最後,作者比較了各模型的參數量與 FLOPs。結果如預期 DiVT-M 在效能與效率之間取得最佳平衡。
雖然 ViT-Tiny FLOPs 較少,但參數量多,效果也不如 MobileViT。這顯示:真正適合 DG-FAS 的架構不只是輕,更要會抓住空間規律
結論
這類主打 domain generalization 的方法,早已不只是「模型表現」的問題,而是「方法論」的選擇。
這篇論文沒有走進對抗式訓練的複雜棋局,也沒有倚賴合成資料來補強視覺線索。相反地,它選擇把空間拉直、把角色明確地擺進特徵座標系裡,形成一種近乎幾何式的抽象處理。
在技術層面之外,這種設計思路也透露出一種對於現實部署的敏感度:
不是堆砌多模態,也不是訴諸重架構。而是找到剛好足夠、又能保持節奏的那個臨界點。
未來的挑戰會更像是邊界問題的排列組合,domain 與 attack 之間的交叉維度只會更加複雜。而這類簡約清晰的表示策略,或許會是我們重新整理問題空間的起點。