[21.05] D²AM

千域鍛魂術
Generalizable Representation Learning for Mixture Domain Face Anti-Spoofing
稍早我們看完了 SSDG,它使用單邊域泛化的技術來處理 FAS 的問題。
這次,曾經風靡一時的 Meta Learning 也加入了戰場。
定義問題
針對 DG 技術在 FAS 上取得初步的成功,這篇論文的作者緊接著就提出了下一個質疑:
所謂的「domain」到底是什麼?
是不同的拍攝場景嗎?還是不同的攻擊方式?還是你乾脆拿資料集的名字來當 domain label?
這些做法過去在 DG 任務中其實都被默默採用了,問題是這些「domain」的劃分方法,其實並不科學。
作者指出三個問題:
-
手動標記 domain label 太花時間。
如果一張圖還要叫人來說「這屬於光線偏黃的領域」,標準化的問題就來了。
-
domain 本身是複雜因素構成,無法單一維度劃分。
有的 domain 是因為鏡頭太爛,有的則是模特兒太假,誰能說這兩張應該同一類?
-
就算你照資料集來劃,也只是 sub-optimal。
A 資料集跟 B 資料集,其實中間有不少交集,模型可能早就把他們搞混了。
面對這個困境,作者提出一個方案:
我們能不能讓模型自己學著分群?
讓模型自己產生 pseudo-domain,然後再從這些 pseudo-domain 中訓練泛化能力。
這就是 D²AM 的核心想法。
解決問題
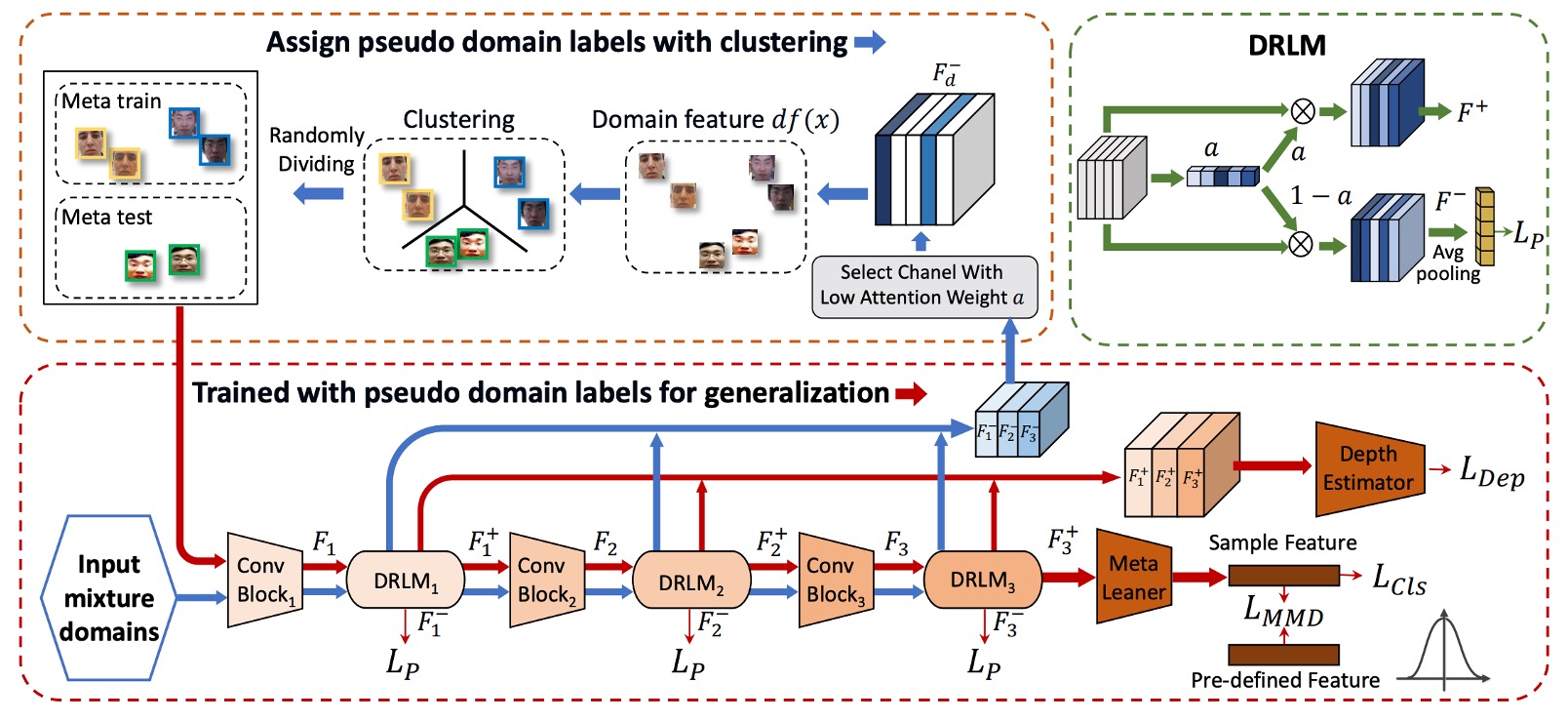
作者提供的模型架構圖看起來非常複雜,容易讓人心生畏懼。
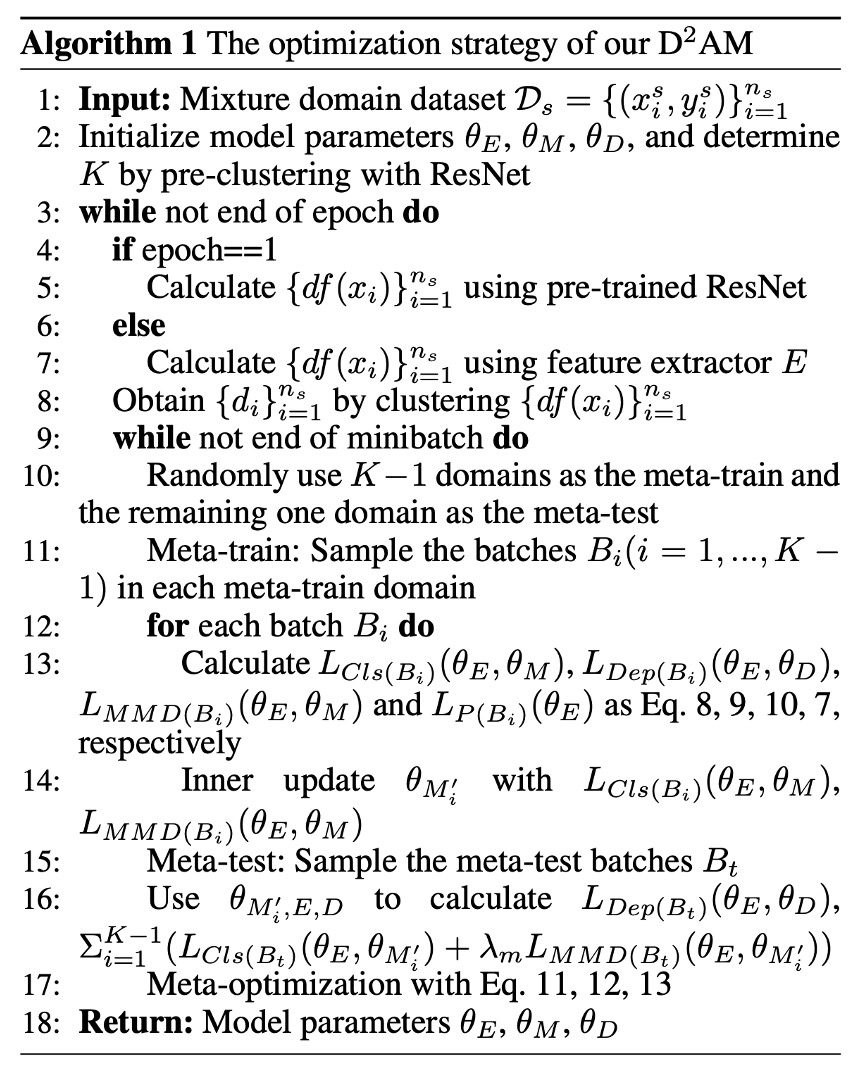
所以我們需要搭配論文中的另外一個區塊來理解這個架構,請參考以下演算法邏輯:
第一階段:分群
這階段的任務很明確:
「我不知道這些圖片來自哪個 domain,沒關係,我自己幫自己分群。」
方法大致上是:
- 抽出 CNN 的 style 統計量(mean, std)
- 經過 DRLM 模組,把特徵拆成 和
- 丟掉任務訊息,用 entropy loss 把 清乾淨
- 對 做 K-means,產出 pseudo domain label
我們來看詳細步驟:
-
Step 1:前處理
參考 Algo1:第 2–5 行,初始時,作者先用一個 ResNet-50(ImageNet 上 pretrain)來跑過一遍所有圖片。
這不是為了分類,而是為了抽出 style feature,組成這樣的向量:
這種來自預訓練模型的特徵可以避開太多任務資訊污染 domain 分類。然後做完第一輪之後,就會改成用 D²AM 自己的特徵抽出器 來做這件事(Algo1:第 6–7 行)。
-
Step 2:用 DRLM 強化 domain 特徵
DRLM 是一個像 SE block 的小模組,會對 CNN feature 加上 channel attention:
接著,把原始特徵分成兩份:
- :這是跟任務相關的特徵。
- :這是我們關心的 domain 特徵。
-
Step 3:丟掉多餘任務訊息,靠 Entropy loss 清洗
作者加上一個「反 entropy」正則化:
其中
它的作用是讓模型對正/負樣本的 task label 產生極度困惑(也就是逼它不要學到 task-related info),專心當一個 domain 特徵。
-
Step 4:K-means 分群,產生 pseudo-domain label(Algo1:第 8 行)
把所有 sample 的 特徵都抓出來,做 K-means clustering。正樣本跟負樣本要分開聚類(因為任務資訊還是殘留)。再配對合併,正負樣本組成同一個 pseudo domain。
為了避免 cluster 跳來跳去,作者用了 Kuhn-Munkres(匈牙利算法) 做 epoch 對齊配對。
第二階段:Meta-learning
有了分好的 pseudo domain,接下來模型要進入「模擬實戰訓練」。
這階段的精神跟 meta-learning 一樣:
我把資料自己分成不同小國家(domain),然後不斷模擬『我在 A 國學到的東西,能不能在 B 國用?』
所以每個 epoch 都會經歷:
- Meta-train:在 K−1 個 domain 上訓練
- Meta-test:在剩下那個 domain 上驗證泛化
- Meta-optimize:根據訓練與測試結果更新參數
這部分跟每次訓練都要做兩件事:Meta-train 和 Meta-test。
-
Step 5:隨機選 K−1 個 pseudo-domain 做 Meta-train(Algo1:第 10–12 行)
在每個 domain 中取出 batch ,接著做三件事:
- 分類 loss:
- MMD 正則:
它的目的是:減少 outlier 對整體分佈的扭曲,穩定 feature space。
- Depth regression(使用 PRNet 預估真臉深度):
-
Step 6:做 Meta-test(Algo1:第 15–16 行)
這邊選出一個 domain 作為 unseen test domain,取 batch ,讓每一個 inner-updated 的 meta learner 去跑一次:
最後同樣也會加入 depth loss。
-
Step 7:Meta-Optimization(Algo1:第 17 行)
這裡三個模組參數一起更新,分別對應 Eq.11–13:
- :feature extractor
- :meta learner
- :depth estimator
每次更新時還會包含來自 DRLM 的 entropy loss:
讓整個網路更專注學出「泛化用的 domain 分群能力」。
最後,我們總結一下這段流水線怎麼跑的:
- CNN feature → DRLM:分出 和
- 抽 → 聚類產生 pseudo domain label
- 用這些 label 當 meta learning 的訓練基礎
- 訓練完,再回去重新抽特徵 → 再聚類 → 再訓練
- 重複這整個過程,直到模型泛化到爆
整體來說,這就是一套「自己分類、自己訓練、自己對自己更嚴格」的自律型演算法。
討論
和其他方法的比較
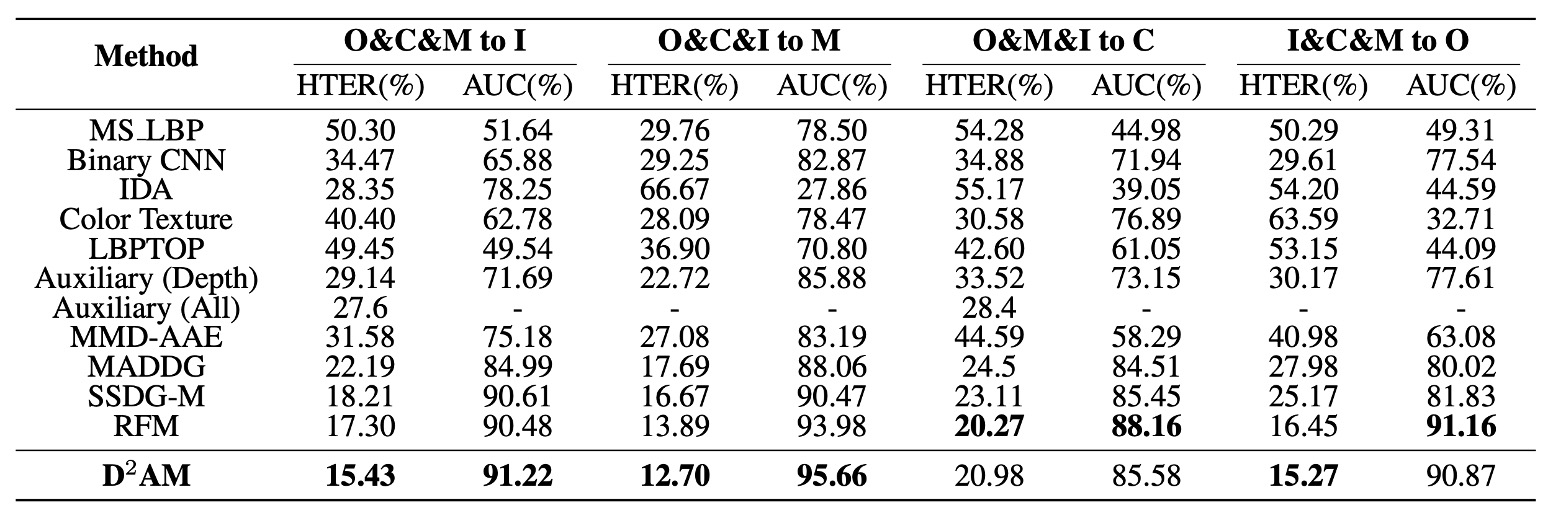
說了這麼多,D²AM 到底有沒有真的比較強?
作者在上表中列出一系列實驗結果,拿四個主流 FAS 資料集輪流當作「未知測試集」,讓模型在只有三個來源 domain 的情況下,挑戰泛化能力。
實驗結果顯示,在所有實驗設定中,D²AM 幾乎全面超越其他方法。不只是傳統 FAS 模型,連帶 domain label 的 DG 方法都輸了。
尤其在 OULU、CASIA、REPLAYATTACK 上,D²AM 不只 AUC 高、HTER 低,穩定性也更好。最重要的是:它做到這一切,不需要人工 domain label,完全靠自己猜出來的 domain。
t-SNE 可視化
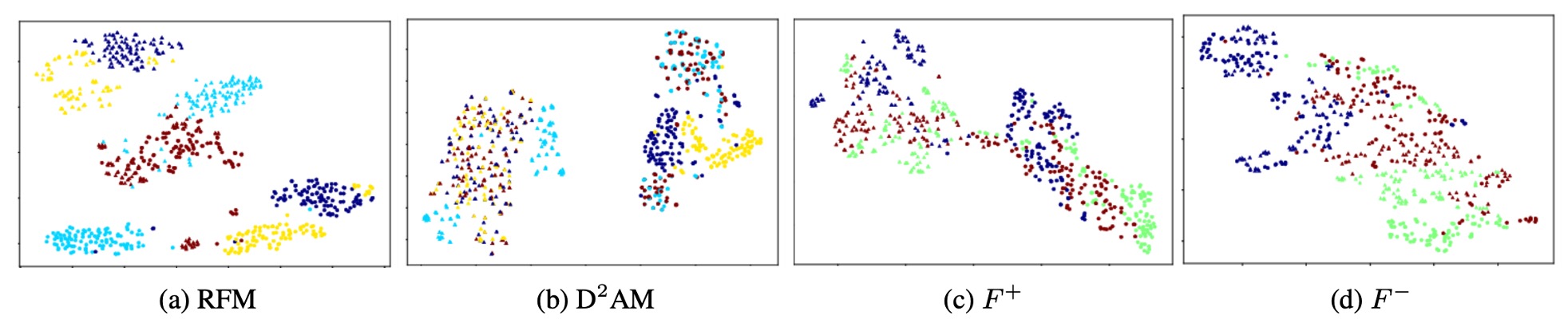
作者還貼心地用了 t-SNE 畫了一堆圖來幫助理解:
- (任務特徵):分布比較散,分類清楚
- (domain 特徵):分群明確但不干擾分類
也就是說, 是幫忙把「來自哪個世界」弄清楚,而 負責「你是真的還是假的」。
這也驗證了 DRLM 模組 + entropy loss 的設計目的沒白費。
聚類可視化
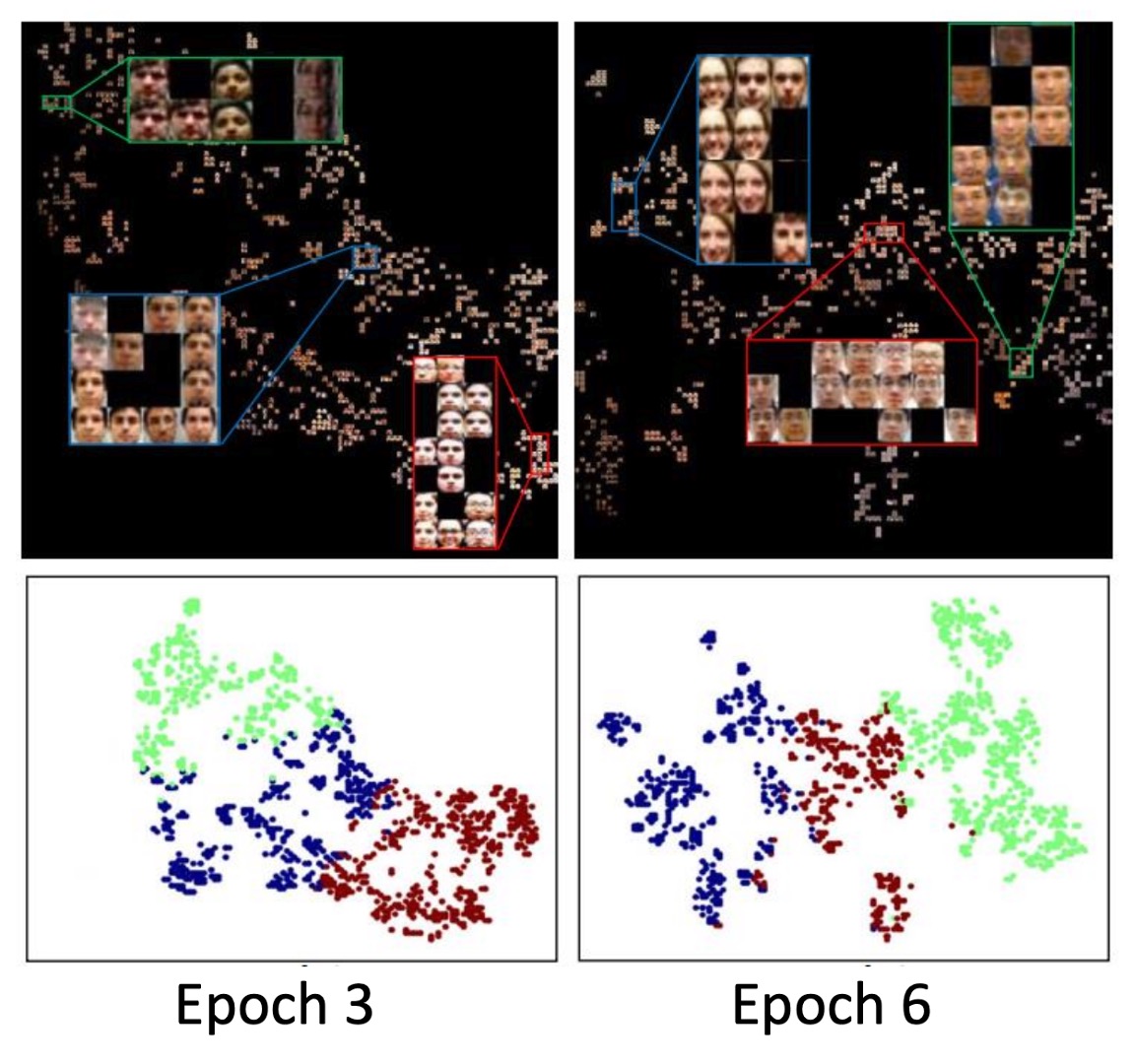
作者進一步觀察 pseudo-domain 的行為,做出一些很有趣的發現:
-
隨著 epoch 推進,D²AM 分群的依據會變:
- Epoch 3 聚焦在光線
- Epoch 6 聚焦在背景
-
每次 clustering 結果都會變(NMI 約 0.6~0.8),這表示它不是只會死記第一輪分法,而是會根據模型的適應狀況來調整 domain 劃分。
最讓人驚訝的是 D²AM 分出來的 pseudo-domain,跟真實 domain 的重疊率只有 60% ~ 70% 之間。
我們以前以為 domain label 是標準的起手式,但其實它也可能不是最好的切法。
結論
D²AM 在 DG 這條路上,提出了一條截然不同的路線。
不需要你幫我標 domain,我自己分群、自己訓練、自己變強。
它的核心觀念很簡單:「泛化能力,不該建立在你事先知道每個 domain 是什麼。」
透過 DRLM 模組 + Entropy Loss + MMD 正則化,D²AM 能在沒有 domain label 的情況下,學出「更有挑戰性」的 domain 劃分方式,進一步訓練出真正穩定的 FAS 模型。
這不只是一個 FAS 案例,也是一種更通用的機器學習思維。
對於那些資料來源混雜、domain 不明的場景來說,D²AM 給出了一個極具啟發性的起點。