[24.03] AFace

波動的邊界
AFace: Range-flexible Anti-spoofing Face Authentication via Smartphone Acoustic Sensing
翻開這篇論文,發現有 33 頁!
讓我們不禁頭痛了起來。
定義問題
智慧型手機的身份驗證系統,在過去十年經歷了從 PIN、指紋、虹膜到臉部辨識的演進。
這些方法彼此遞進,從記憶轉向生物特徵,從接觸感測轉向非接觸感測,每一步都訴求更高的便利與安全性。
但這段技術演化的路線,似乎也在某處碰到了邊界。
- PIN 密碼 容易遺忘,也容易被偷窺;
- 指紋辨識 雖具唯一性,卻能被複製成矽膠模型;
- 虹膜辨識 準確但成本高昂,難以普及;
- 臉部辨識 雖已廣泛部署,卻脆弱於最基本的照片與影片攻擊。
即便進一步導入 3D 感測模組,例如 dot projector、紅外結構光,仍然存在以下三個風險:
- 成本與體積限制:這類硬體元件往往使得手機 BOM 增加 5% 以上,難以普及;
- 資源與延遲瓶頸:高效能模型往往伴隨超過 4 秒的推論時間,難以接受;
- 偽造與隱私風險:視覺資訊不僅可被複製、也易於外洩,難以防範。
不只如此,主流的防偽研究雖持續演進,從紋理特徵到深度學習,卻始終難以擺脫一項核心挑戰:
當攻擊者手上握有 3D 列印模型,現有視覺系統仍無從辨識其材料本質。
於是,有人開始從訊號入手。
聲波、WiFi、RFID、RF 訊號開始出現在身份驗證的文獻中。這些非視覺的方法,試圖穿透形貌,讀取使用者的步態、呼吸、心跳與反射特徵。然而,這些方法仍面臨自身的限制:
- 步態特徵受衣著、姿勢影響過大;
- WiFi 與 RFID 雖準確,卻仰賴額外裝置與標籤;
- 耳道辨識則需要配戴不舒適的入耳式設備。
即使是近期已能以手機麥克風/喇叭實現的聲波臉部辨識,也大多著眼於形狀重建,仍難逃 3D 假臉模型的模仿攻擊。因為一旦形狀一致,回音就雷同,辨識就失敗了。
於是問題來了:
如果連回音都能被模仿,還有沒有一種特徵,是攻擊者無法偽造的?
解決問題
AFace 是以聲波為主的驗證系統。
它依靠一對手機既有的發聲與收音組件,喇叭與麥克風來進行臉部辨識。
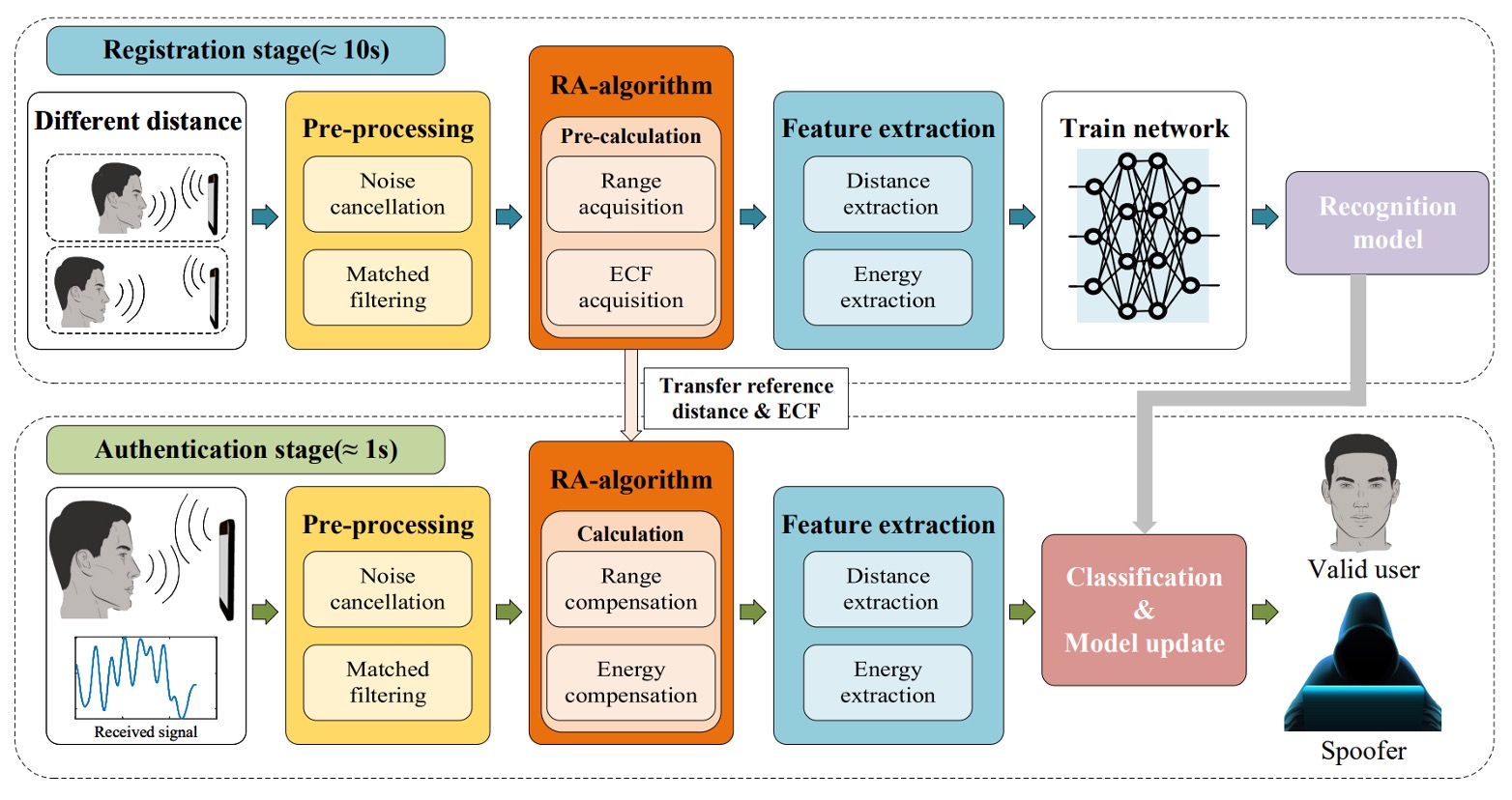
整體流程包含四個步驟:
- 聲波投射:使用者在兩個不同距離下,讓手機主動發出聲波並接收反射回音,藉此建立「能量-距離」的對應關係。
- 訊號前處理:回音訊號經過背景反射消除與匹配濾波(match filtering)處理,以過濾掉直接波與非臉部物體的干擾,並提取與距離維度相關的資訊。
- 補償模型:為了因應使用者與手機距離的浮動,系統將建立一個範圍自適應(RA: Range Adaptive)模型,並利用前述雙距離資料計算出一個能量補償函數(ECF: Energy Compensation Function),使得往後所有測量都能被標準化回相同參考基準上。
- 特徵抽取與模型訓練:在訊號經過補償後,系統會提取其關鍵特徵,並以深度學習模型進行分類訓練,作為後續比對的基礎。
聲波投射
聲音既要被發射,也要能被辨識;既要能量集中,也不能打擾使用者。
為了讓這條訊號兼具「可解性」與「可行性」,作者採用幾個設計:
-
訊號設計:AFace 採用 FMCW(Frequency Modulated Continuous Wave) 作為訊號基底,其優點如下:
- 頻率區隔性高:10–22 kHz 的設計避開了大多數背景聲(< 8kHz),能透過高通濾波移除環境干擾;
- 解析度夠細:12 kHz 頻寬對應 1.4 cm 的距離解析度,可辨識臉部區域的細微差異;
- 可在手機端運作:多數手機支援 24 kHz 以下頻率;考量訊號衰減,22 kHz 是合理上限;
- 聲音不擾人:10 ms 的訊號長度 + 40 ms 間隔,讓使用者「幾乎無感」;
- 能量控制得宜:應用 Hanning window 聚焦能量在 16 kHz,避免頻譜外洩。
這段訊號的數學形式如下:
看不懂沒關係,讀者大概理解一下就好,其中每個部分的意義如下:
- :定義訊號只存在於 10 ms 內( ms);
- :載波頻率(centered at 16 kHz);
- :掃頻率(chirp rate);
- :為 fast time,用來標定每段訊號的時間窗格;
- :為 slow time,代表每個 chirp 發送的時間點()。
透過這樣的設計,訊號在物理世界中展開、反射、收斂為一組可供比對的數位特徵。
-
等深模型(Iso-depth Model):當聲波傳出後,手機麥克風接收到的其實是一組混亂的訊號。為了解析這些訊號,作者將其分類為四類來源:
- 環境聲音雜訊;
- 直達路徑訊號(從喇叭直接到麥克風);
- 來自人臉的反射(作者想要的);
- 來自其他物體的反射(作者想移除的)。
為此,AFace 建立如下的多路徑接收模型:
其中:
- :代表第 條路徑的延時;
- 可視為將第 條反射訊號建模為類似發射訊號的延遲版本。
為了簡化訊號處理,作者將整體訊號進一步拆成:
- :為目標反射(人臉);
- :為其他非人臉反射(之後將要移除)。
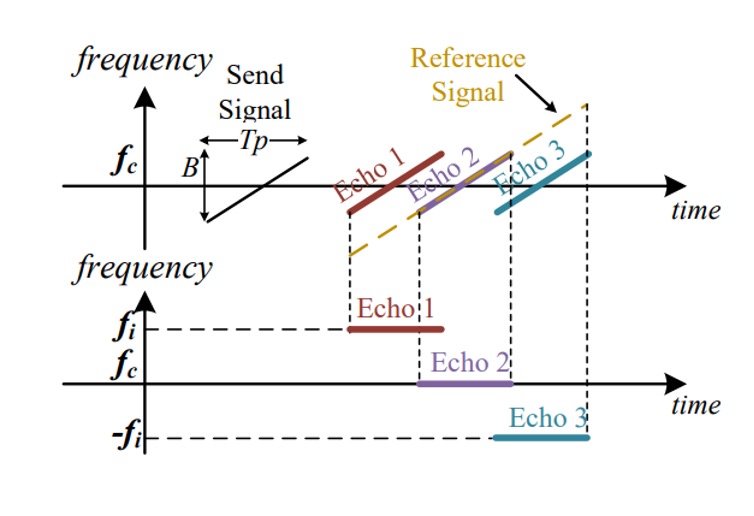
為了讓聲波能對應到「一張臉」,AFace 採用的核心技術是 match filtering(匹配濾波),將接收到的回音訊號與參考訊號 作卷積,找出其在時間軸上的重疊區域,形成一個能量峰值:
- :為卷積運算;
- 能量峰值代表回波與參考訊號「對齊」的位置,亦即反射距離的分布。
由於不同區域若距離相近,峰值會重疊並能量疊加,這樣的「疊加現象」成為臉部各區的反射辨識依據。
為了讓模型具備「臉部意識」,AFace 將臉部分成六個等深區塊,如下圖所示:
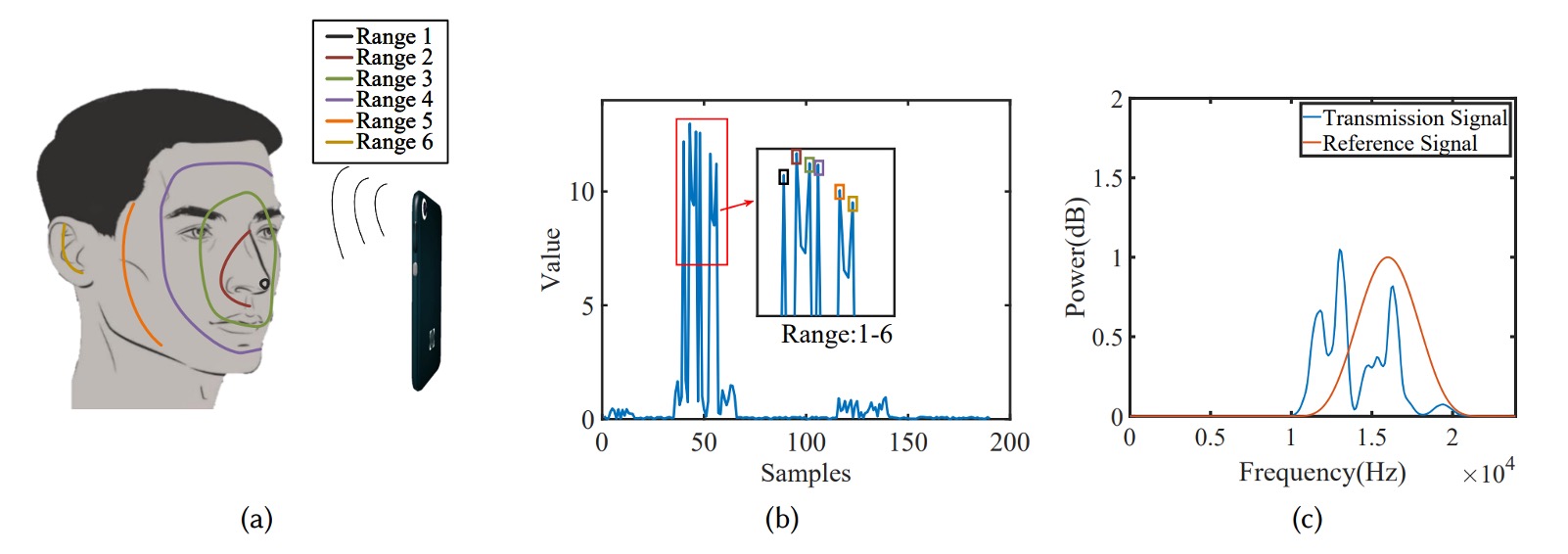
- 最接近:鼻尖(反射面積小、能量低);
- 前環區:眼窩、額頭、嘴唇(反射面積大、正對手機,能量最高);
- 側頰區:斜角反射、能量有限;
- 最遠區:耳朵(距離遠、結構複雜、能量最低)。
這些物理條件,轉化為能量分佈的模型峰值,如上圖 (b) 所示。作者甚至在後續實驗中以遮擋區域的方式驗證模型準確性,證明聲波反射能真實對應臉部材質與形狀。
訊號前處理
所有訊號都是故事,但我們得先讓雜音閉嘴。
訊號設計固然重要,但真正進入接收端之後,我們面對的是一段扭曲、延遲、充滿雜訊的聲波。我們無法假設手機送出的訊號就是我們收到的訊號,因為硬體的非理想性與環境的不可控,讓「回聲」這個訊號,成為一份等待被清洗與校正的原始檔。
AFace 的前處理模組分為以下四步驟:
-
擷取真實參考訊號
首先,手機喇叭與麥克風對不同頻段的增益不同,導致實際發射與接收訊號並不理想。
為此,作者提出一個實用的「去硬體化」方法:
- 在無人環境中收集一次背景訊號;
- 第二次放置一塊 紙板於 15 cm 處,收集一次單一反射;
- 取兩者差值,可近似取得單純來自該紙板的單一回聲,作為後續的參考訊號 。
這個動作的意義在於:我們不再假設知道發射訊號,而是透過量測來回推真實的聲音。
-
對齊訊號起始點
手機的喇叭與麥克風無法同時運作,因此接收到的訊號無法直接標定「真正的發射時間」。
為解決這個問題,作者利用了手機內部「喇叭到麥克風的固體傳播」:
- 聲音在手機內部(喇叭 → 麥克風)距離僅數公分,傳播延遲僅約 0.04 ms;
- 固體傳播耗損低,訊號強度高;
- 透過 cross-correlation,可精確抓出直達訊號的到達點,作為時間基準。
這個動作會帶來約 1–2 個 sample 的誤差(約 0.7 cm),但不會影響臉部相對距離(差值仍準確),且可由後續 RA 演算法消除。
-
雜訊消除
雜訊分為兩種:
- 環境噪聲:多為 10 kHz 以下,可直接用高通濾波器去除;
- 訊號雜訊:例如直達訊號干擾或多重反射雜訊,則需用參考訊號進行對應減除。
不過,直接相減無法完全去除雜訊,因為回波強度會依反射物距離而衰減,波形相似但振幅不同。
為此,作者引入縮放係數 ,以最小化下式的差值誤差:
- :接收訊號;
- :先前記錄的乾淨參考訊號;
- :透過最小平方法求得。
實驗顯示,在 200 帧的連續訊號中, 的變動可穩定補償反射衰減。
-
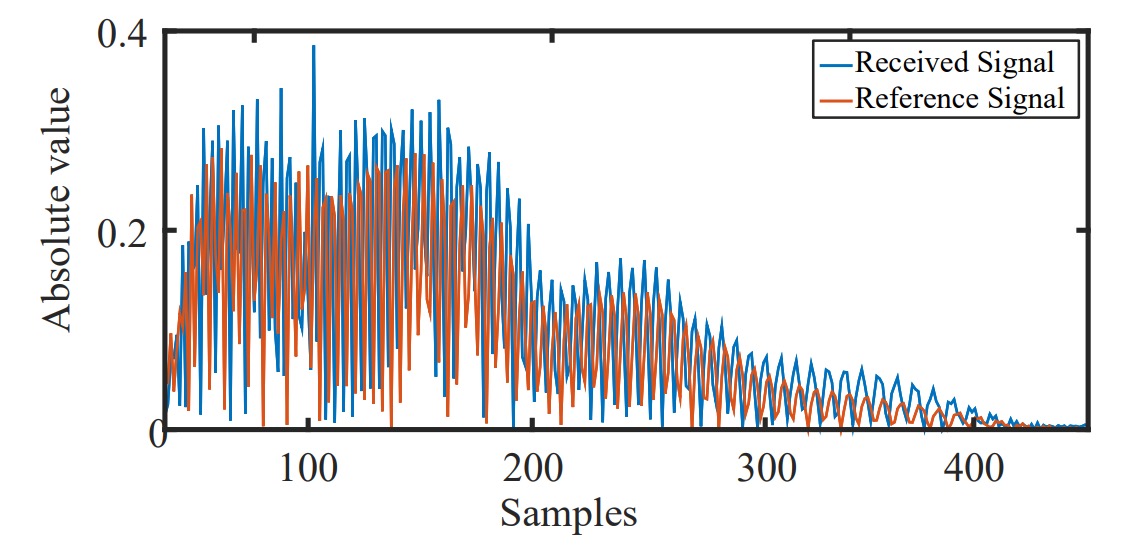
匹配濾波
一旦對齊並去除雜訊,我們已得到近似人臉的回音訊號 。
接下來進行匹配濾波(match filtering),也就是與參考訊號做卷積:
這是一個類似 sinc 函數的結果,代表:
- 不同距離的反射,會在不同時間點產生能量峰值;
- 每個峰值對應臉部不同區域的「深度回聲」;
- 若用傅立葉分析,可得每段回波對應的頻率:
其中 為與參考訊號之間的距離差, 為聲速。
換句話說,這裡是透過匹配濾波與傅立葉轉換,把一段模糊的聲波訊號,還原成一份有解析度的「距離圖譜」,也就是臉部結構的深度輪廓。
RA 補償演算法
接著我們需要把變動的距離轉換成穩定的特徵,作為後續的臉部辨識依據。
聲音的回聲是距離的函數。
但在真實使用場景中,使用者不可能總是在 15 公分或 20 公分的位置舉起手機;每一次認證,臉與手機的距離都在些微浮動。這樣的距離差異會導致訊號相位偏移、能量改變,進而影響模型辨識的穩定性。
AFace 為此設計了 RA(Range Adaptive)補償機制,將每一次變動的輸入,重新映射回一個穩定的距離與能量基準。
這個機制包含兩個子模組:
- Range Compensation:補償回聲訊號的相位變化;
- Energy Compensation:校正反射能量與距離之間的對應關係。
AFace 在註冊階段,要求使用者於兩個不同距離(例如 、)下進行註冊,並記錄其最近回聲點(距離 、)與對應最大能量(、),作為後續補償的基準。
當進入認證階段,若臉部距離為 ,其回聲訊號的相位為:
相對應的理想相位 (以 為參考)為:
兩者相差為:
這樣的相位差不只是時間差異,還會導致傅立葉變換後的峰值偏移,進而影響距離估計與特徵提取。
為了對齊訊號,AFace 對所有訊號執行如下補償操作:
也就是讓訊號的相位重回「標準距離」的位置,彷彿所有臉都在同樣的位置上進行比對。
除了相位偏移,回聲的能量也隨距離與材質而變。
AFace 發現這不只是誤差來源,反而可以轉化為有力的辨識特徵。
於是作者進行實驗設計:
- 將不同材質(紙板、木板、鐵板)以固定速度向手機靠近;
- 每次播放 10 秒訊號並記錄不同距離下的峰值能量;
- 過濾雜訊與背景反射、執行匹配濾波,得到不同距離下的反射強度;
- 擷取各距離之最大能量,繪製能量變化圖;
- 線性迴歸擬合能量與距離,得到極高相關係數(,RMSE = 0.03198)。
實際操作的方式如下圖:
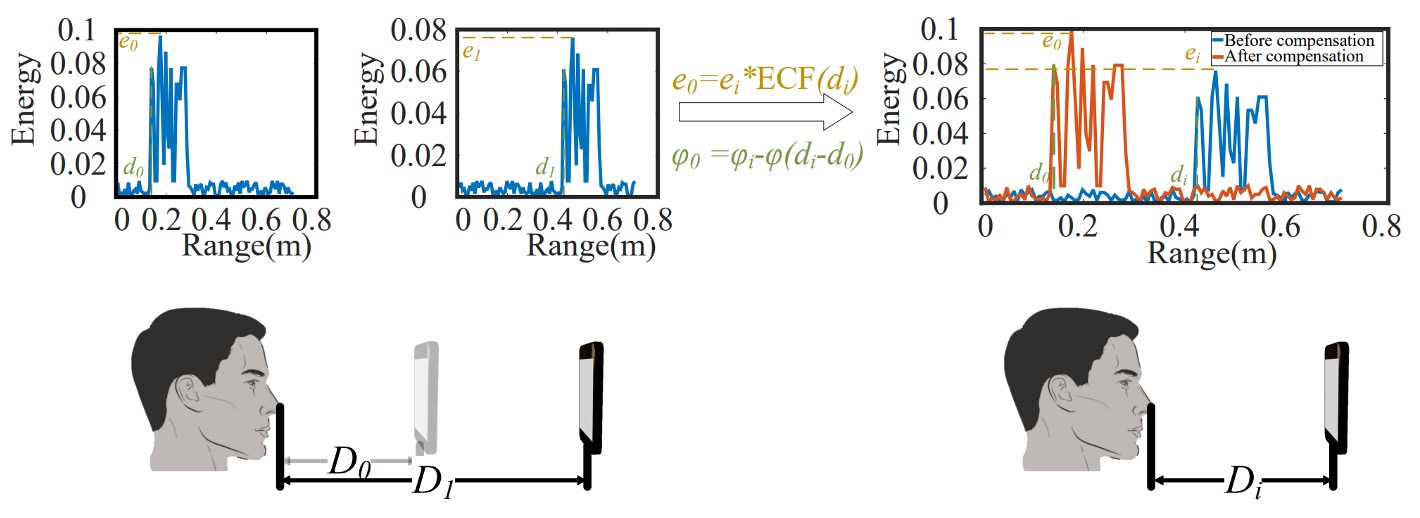
由於能量與距離呈高度線性相關,且不同材質會呈現不同能量曲線。
AFace 建立一條能量補償函數(ECF)如下:
這代表在距離 時,理論上應該出現的能量。實際上收到的能量 則會被補償為:
此補償不會強行將 拉回 ,而是保留其特徵性,也就是說:
若攻擊者使用 3D 假臉,其材質與能量分佈不同,即使距離相同,補償後的能量也會與真實用戶明顯不同。
這是一種「差異保留型補償」,既校正了距離影響,又放大了材質差異,讓聲波的能量成為一種不可偽造的「臉的證明」。
特徵擷取
當訊號被對齊、補償、過濾之後,AFace 需要從這些回聲中,提取能分辨一個人與另一個人的資訊。
作者將這些特徵設計分為兩大類:
- 距離特徵(Distance Features)
- 能量特徵(Energy Features)
首先是距離特徵:
延續 Iso-depth 分區模型,AFace 將臉部分成六個主要區域,並選擇其中五個作為深度分析目標:
- 鼻尖(nose tip)
- 鼻根(nose root)
- 嘴唇與眼窩(lips & eye socket)
- 臉頰與額頭(cheek to forehead)
- 側臉(side of face)
- 耳朵作為最遠端,深度基準設為 0
根據這些分區,特徵設計如下:
-
五個絕對距離值:以匹配濾波後的峰值位置估計;
-
十組相對距離差:任意兩區之間的深度差值,例如鼻尖與鼻根的距離代表「鼻梁高度」;
-
五組面積近似資訊:當多區深度接近,匹配濾波後會產生 重疊峰,寬度反映反射區域大小;
- 具體以 50% 能量處的峰寬為基準(類似 FWHM 概念);
- 特別針對鼻根與嘴唇–眼窩區,計算兩個近距區的峰寬。
接著是能量特徵:
材料不同,聲波反射也不同。為此,作者設計了幾個遮罩實驗如下圖:
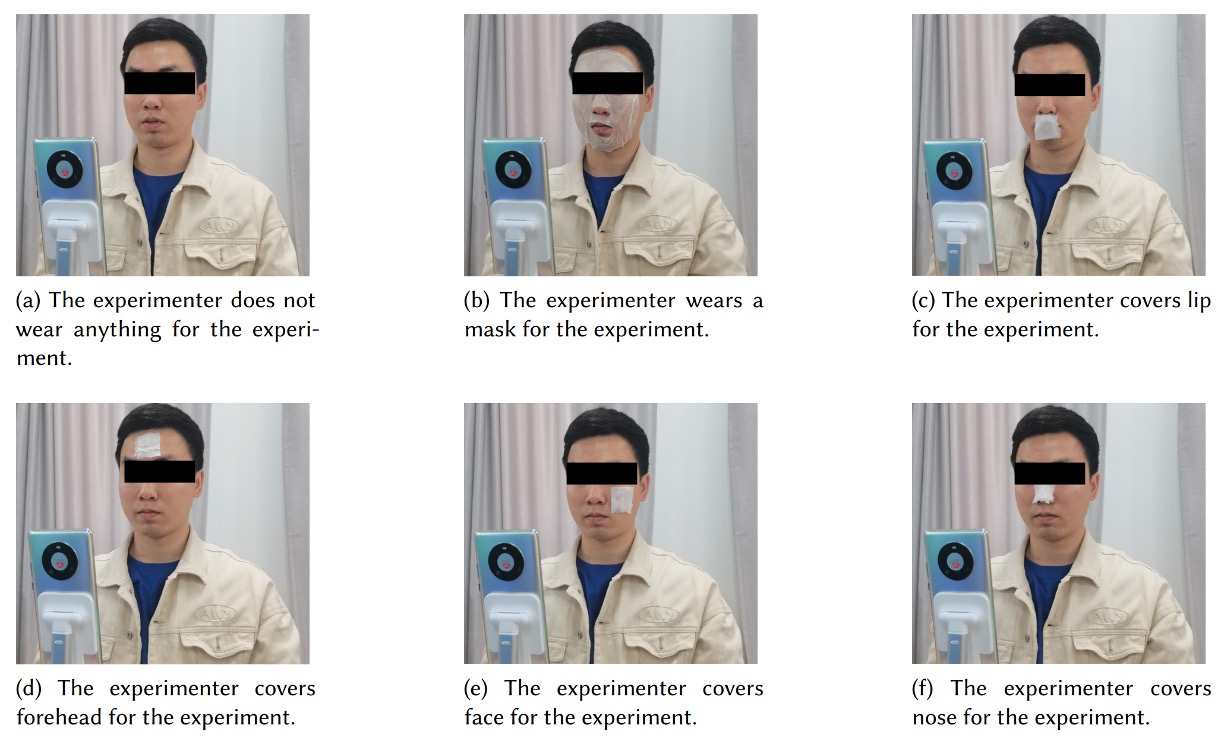
根據覆蓋不同區域的實驗,來觀察能量變化。實驗中也發現材質(皮膚 vs 模型)對能量的吸收率、反射率造成顯著影響。
也就是說:即使 3D 模型在形狀上成功騙過我們,它的能量表現依然會出現偏差。
最後,作者選定擷取的能量特徵如下:
- 最大能量(max energy):整體反射強度,反映皮膚與面積資訊;
- 平均峰值能量(avg peak energy):整體臉部的反射平均;
- 變異數(variance):反映臉部深度分佈是否集中還是分散;
- 尖峰因子(peak factor):高反射點的強弱程度;
- 平均頻率(average frequency):回聲主頻分佈;
- 能量密度(energy density):能量在區域內的集中程度。
這些特徵綜合反映材質特性,補足了形狀無法區辨的部分。
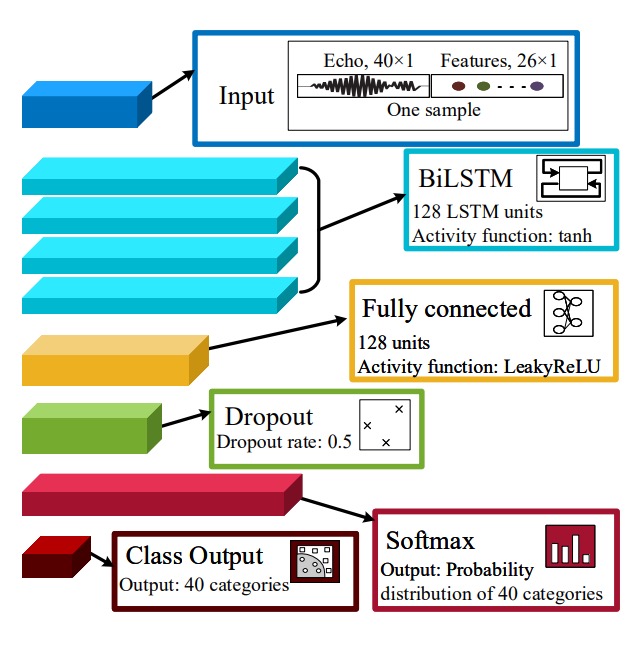
AFace 總共選用了 26 維特徵,融合形狀、材質、反射行為於一體,成為 AFace 後端分類模型的核心輸入。
分類器架構
完成特徵設計和截取後,AFace 需要一個分類器來將這些特徵轉化為「我認識你」的結果。
作者將其分為兩個部分:
- 使用 BiLSTM 捕捉訊號中的時序邏輯與分區特徵;
- 使用 iCaRL 解決使用者更新與類別擴增時的「遺忘問題」。
在 AFace 中,輸入特徵不只是表格化資訊,而是包含「訊號切片」、「距離關係」與「能量輪廓」的複合特徵。為了處理這樣的資料結構,AFace 採用了「四層 BiLSTM 結構」:
-
40 維訊號切片(時間序列):
- 取自去雜訊與距離補償後的 echo 殘響;
- 對齊鼻尖為起點,截取 40 sample ≈ 14 cm 範圍;
-
20 維距離特徵:
- 5 個絕對深度(鼻尖、鼻根、唇眼、頰額、側臉);
- 10 個相對深度差;
- 5 個匹配濾波後的峰寬(反映區域重疊與形狀);
-
6 維能量特徵:
- 反映材質性質、分佈與反射強度(見前章)。
BiLSTM 的參數配置如下:
- Layer:共四層;
- 啟動函數:
tanh(隱狀態值在 間波動); - 閘控函數:
sigmoid,表示訊息是否保留; - 權重初始化:Xavier initialization(針對
tanh最佳化); - 遺忘閘:初始化為接近 1(unit-forget-gate),強化長序列學習能力。
全連接層與分類器的部分則是:
- Dense Layer(128 units),啟用函數為
LeakyReLU; - Dropout 層(rate = 0.5),防止過擬合;
- Softmax 層(40 類別),將最後輸出轉換為身份機率分佈;
- Classifier:將 Softmax 機率對應至身份類別。
另一個部分是 iCaRL 增量學習策略。
AFace 為了解決「使用者增加」與「臉部變化」這兩類長期問題,採用了 iCaRL(Incremental Classifier and Representation Learning)策略,將神經網路變成一個可動態更新、不遺忘舊知識的結構。
增量學習分成類別增量與資料增量兩種情境:
-
類別增量學習(Class Increment):
- 新使用者註冊時,從其回聲資料擷取特徵,產生新的訓練樣本;
- 模型結構上增加一層新的全連接分類節點,以支援新類別;
- 凍結既有 BiLSTM 與 FC 層,保留已學知識、不再重訓;
- 僅微調新層,加快訓練、穩定輸出。
-
資料增量學習(Data Increment):
- 當使用者多次通過輔助驗證(例如輸入 PIN),系統認定其臉部可能發生長期變化;
- 每發生一次「聲波驗證失敗但備援成功」,會將新樣本暫存;
- 當累積樣本數 ≥ 5,即觸發「資料增量學習」流程;
- 保持模型架構不變,僅以低學習率進行微調,實現長期適應與記憶更新。
這種增量學習方式避免了傳統模型在新資料出現時的「毀滅性遺忘(catastrophic forgetting)」,也避免了重新訓練整個網路所需的高計算成本。
這樣設計的目的在於,作者希望 AFace 能夠持續觀察使用者而逐步修正記憶,概念上不只是一個分類器,而是一種「適應關係」。
討論
論文中的實驗表格非常多,我們不一一列舉,有興趣的讀者可以參考原始論文。
以下我們挑幾個方向來檢視這個方法的表現。
不同喇叭與麥克風組合
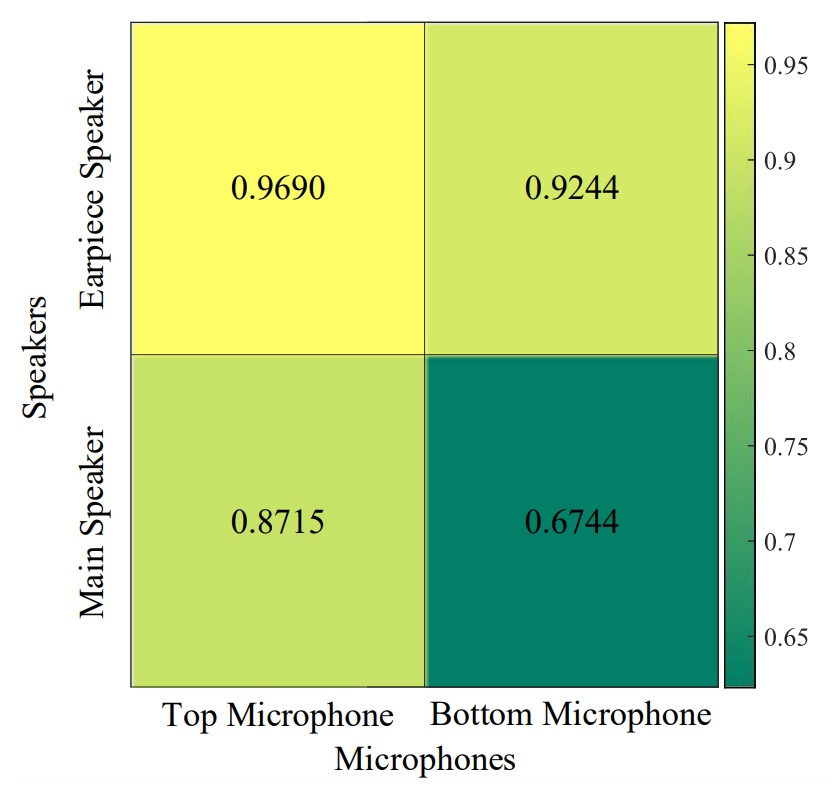
實驗結果顯示:最佳組合為「頂部喇叭 + 頂部麥克風」。
若使用底部喇叭或麥克風,回聲多半來自使用者的胸口區域,受衣物材質影響大;小小變動(如換件外套)便會造成系統辨識表現顯著下降。
這裡建議硬體設計上,建議優先選擇頂部組合,以減少無關反射且更專注於臉部訊號。
2D 與 3D 攻擊
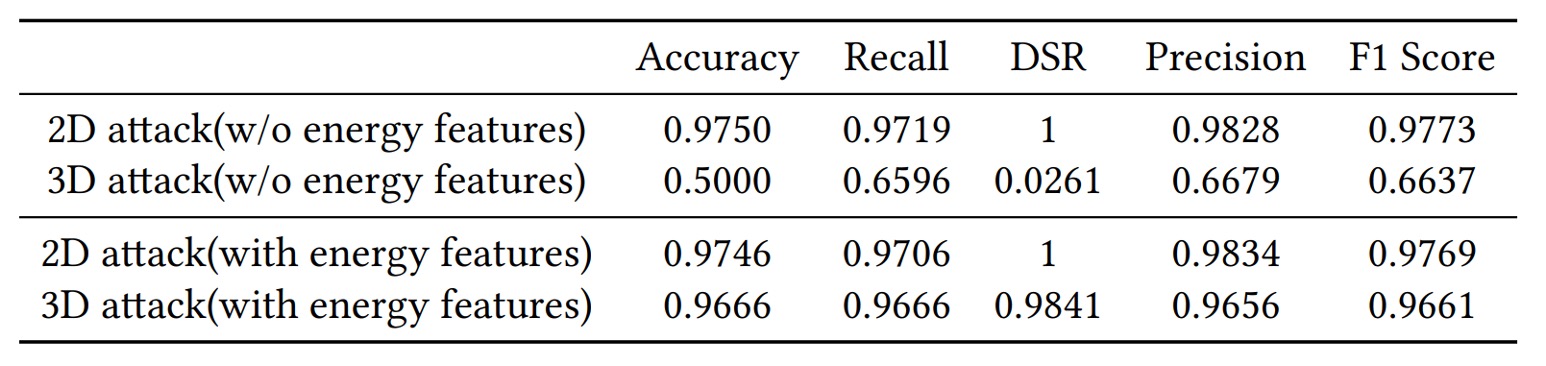
實驗結果顯示:無論是 2D 攻擊還是 3D 攻擊,AFace 都能有效防禦。其根本原因在於「聲波驗證包含深度與材質」,平面影像無法提供任何真實回聲。
如果不納入能量特徵,AFace 對 3D 假臉的防禦成功率僅有 5%;但一旦加入能量特徵,成功率提升至 98% 以上。因為 3D 模型即使形狀一致,材質吸收與反射率依舊和人臉不同,而 AFace 能夠「聽出」這些差異。
RA 演算法的重要性
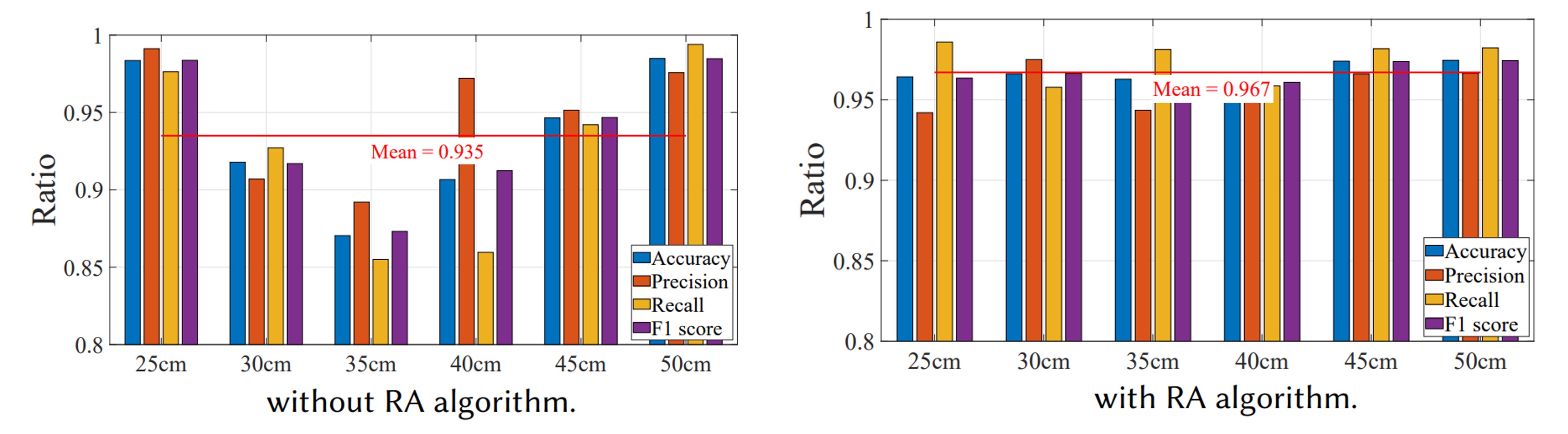
為了驗證 RA 演算法的有效性,作者進行了以下實驗:讓使用者在 25 cm 與 50 cm 註冊後,再於 25、30、35、40、45、50 cm 進行單一用戶模式的多次測試。
實驗結果顯示在沒有 RA 的情況下,僅有註冊距離(25、50 cm)準確率較高(>96%),其餘距離約 90%;而啟用 RA 後,各距離準確率均高於 95%,平均 96.7%。可見 RA 有效校正相位與能量偏移,讓「距離」不再是使用者體驗的最大障礙。
長期使用與臉部變化
再來是要驗證 iCaRL 的增量學習效果。
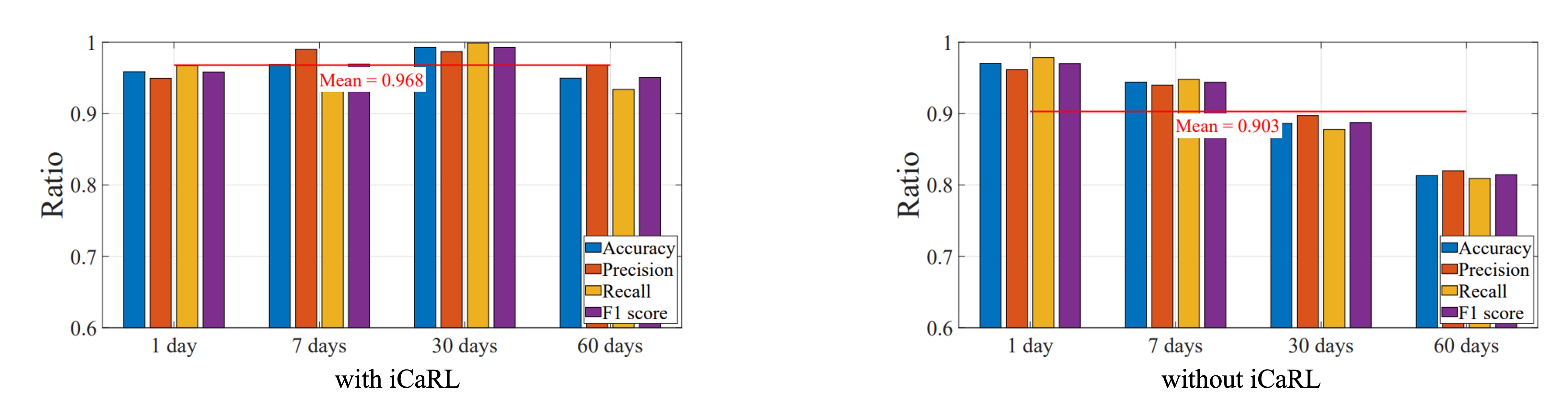
AFace 進行了長達兩個月的實驗,觀察使用者的臉部變化與系統準確率:使用者分為兩組,一組使用 iCaRL 增量學習,另一組則不使用。經過連續兩個月的資料收集,觀察「老化」、「髮型變化」、「配戴眼鏡」對系統的影響。
實驗結果顯示:在無增量學習的情況下,隨著時間拉長,準確率明顯下滑;而啟用 iCaRL 後,系統可自動更新模型,長期穩定度保持高水準,約 95~98% 間波動。
結論
從 2019 開始,聲波逐漸被引入 FAS 領域,帶來一條不同於影像的辨識路徑。
但這些方法普遍有許多限制,最重要的:
聲波無法解決 3D 面具的問題!
在聲波下的面具和真實臉部幾乎沒有區別。
在 AFace 這篇工作中,把材質的概念引入,讓聲波的回聲成為「距離 + 材質」的複合函數,才終於讓聲波成為一個可行的 FAS 方法。
AFace 不只改善了 3D 抵禦力,更透過距離補償(RA)與能量建模(ECF),拓展了聲波驗證在真實世界中的操作彈性與使用情境。它也是少數同時在商用手機完成實作,並加入增量學習以處理長期變異的聲波驗證系統之一。
這不代表這個問題已被完整解決,但至少我們知道:
聲波已經可以成為獨當一面的辨識線索。