[24.10] YOLOv11

エンジニアリング最適化版
YOLOv11: An Overview of the Key Architectural Enhancements
Ultralytics が新しいアーキテクチャを発表したときに論文が出るのは珍しいことだ。
何はともあれ、こういう動きは応援すべきだ。
問題の定義
物体検出の舞台で、YOLO という名前はすでに 10 年間叫ばれてきた。
2015 年、Redmon は「You Only Look Once」というスローガンを掲げ、従来主流だった 2 段階検出アーキテクチャをばっさりと捨て、検出を回帰問題として一度に分類と位置決めを完了させた。
それ以来、YOLO の各世代は「リアルタイム検出」の代名詞となっている。
しかし、YOLO ファミリーの進化とともに、2 つのコアな問題がすでに表面化していた:
- 性能と速度のジレンマ:小さなモデルは速いが精度が低い。大きなモデルは精度が高いが遅い。
- マルチタスクの統合:検出、セグメンテーション、ポーズ推定、回転ボックス、これらのニーズは実務上同時に存在するが、これまでのバージョンではうまく統合できていなかった。
そこで Ultralytics チームは、YOLO を万能なビジョンシステムへと進化させようとした。
えっ?そんなに都合のいい話が?一緒に見てみよう。
問題の解決
YOLOv11 は YOLOv9 および YOLOv10 の設計基盤を継承しており、全体の構造は典型的な三段構成を保っている:
- Backbone → Neck → Head
徹底的な刷新はなかったものの、いくつかの局所的な改良を通じて、性能と効率のより安定したバランスを目指している。
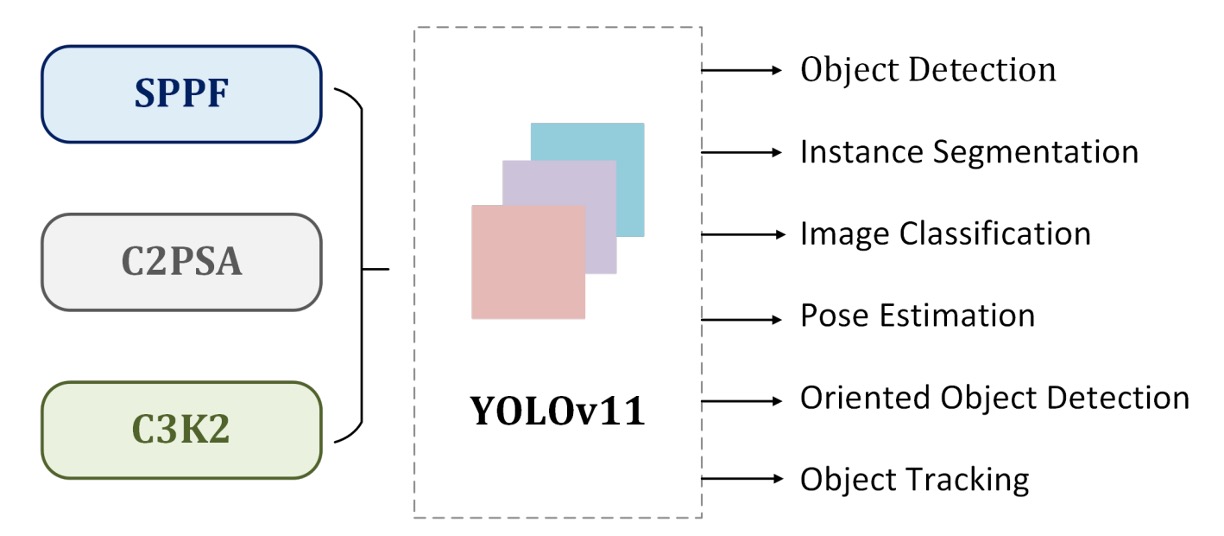
Backbone:小規模な置き換え
-
C2f → C3k2
以前よく使われていた C2f block が、新しいC3k2 blockに置き換えられた。
この変更の目的は単純に「より速く、より省エネ」を追求するため。大きな畳み込みを小さな畳み込みに分割し、より小さいカーネルで計算することで計算量とパラメータ数を減らす。効果としては、C3k2 はあまり精度を犠牲にせず、より良いレイテンシ-精度比を実現している。
ヒント構造を描いてみると、大体同じだ。
つまり、積み重ねていた部分を従来の Bottleneck から C3k モジュールに差し替えただけだ。
C2f
C3k2
-
SPPF + C2PSA
SPPF モジュールの後に、C2PSA(Cross Stage Partial with Spatial Attention)が追加された。
これにより、モデルは画像の重要な領域により注意を向けることができるようになり、小さな物体や遮蔽物のある物体への対応が向上する。
ただし、このようなアテンション設計自体は新しいものではなく、「トレンドを追う」選択に近い。
ヒント恒例として、この新しい C2PSA モジュールについても図を描いてみよう。
C2‑PSA
PSA(Position‑Sensitive Attention)
ConvAttention(PSA 內部 MHSA 細節)
Neck:特徴融合の小さな修正
Neck の役割は、異なる解像度の特徴を統合することだ。
ここでも YOLOv11 はC3k2 blockを採用し、さらに C2PSA を組み合わせることで、融合プロセスの効率を若干向上させている。
全体的に見て、この部分の改良によって、YOLOv11 は速度 − 精度曲線で v8 や v9 よりも見栄えが良くなった。
Head:出力層の拡張
Head 部分において、YOLOv11 は大幅な構造変更はせず、C3k2 blockおよび CBS(Conv-BN-SiLU)を継続して採用し、最終的にバウンディングボックス・オブジェクト性スコア・分類結果を出力する。
マルチタスクの統合
YOLOv11 は過去バージョンと比較して、最も顕著な変化は検出アーキテクチャ自体ではなく、「マルチタスクフレームワーク」として正式に位置づけられたことにある。
以下の表を参照:
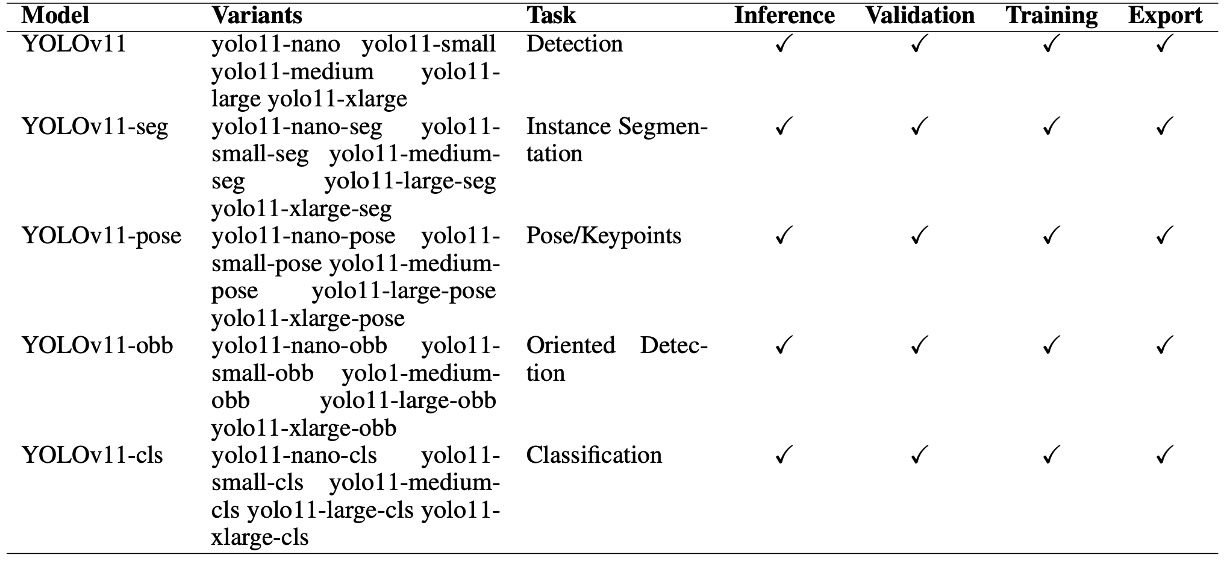
標準の物体検出に加えて、Ultralytics はセグメンテーション(segmentation)、ポーズ推定(pose)、回転ボックス(OBB)、分類(classification)も同一システムに統合し、同じ推論・検証・学習・エクスポートインターフェースを提供している。
実際の応用では、このような統合には一定の意義がある。研究者や産業開発者にとって、これまでは異なるタスクごとに別々のツールチェーンや分散した実装に依存する必要があったが、今では YOLOv11 の統一バージョンで完結できる。
ただし注意すべきなのは、YOLOv11 はすべてのタスクで最高の精度を誇るわけではなく、多くの場合「使える・一貫した」レベルを維持しているという点だ。
言い換えれば、その強みは単一タスクの最先端性能ではなく、さまざまなコンピュータビジョンのニーズを一つの入口に集約し、比較的安定したマルチタスクエコシステムを形成している点にある。この位置づけは Ultralytics のプロダクト戦略にも合致し、YOLO シリーズが実務でより広範な用途に対応できる理由となっている。
議論
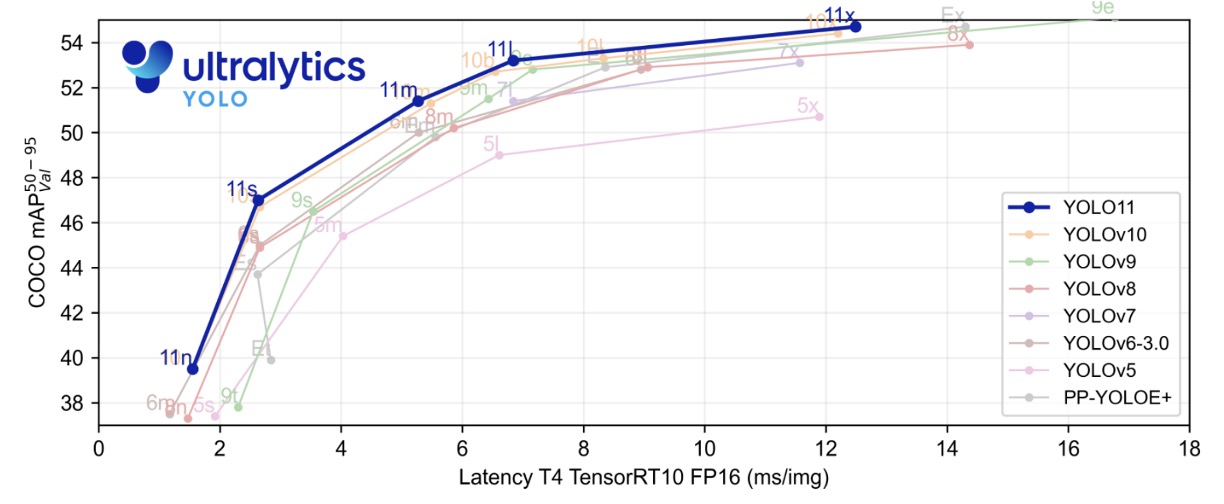
公式ベンチマークを見ると、YOLOv11 は速度と精度のバランスで前世代よりも整った結果を示している。
異なるサイズのモデル(n、s、m、x)は、COCO 上で YOLOv8、YOLOv9、YOLOv10 よりもわずかに高い mAP を達成し、同時に比較的低いレイテンシーも維持している。特に YOLOv11m は、精度が YOLOv8l に近いにもかかわらず、パラメータ数や計算量がより少なく、この世代が「効率最適化」に本気で取り組んだことがうかがえる。
高レイテンシー帯では、大きなモデル(YOLOv11x)が約 54.5% mAP@50–95 を達成し、推論時間は 13ms 程度に収まる。一方、低レイテンシー帯では、小さなモデル(YOLOv11s)は 2-6ms の範囲で約 47% mAP を維持している。この分布により、YOLOv11 はリアルタイム用途の多様なニーズに合わせた適切なサイズバリエーションを提供しており、実用上便利だと言える。
結論
本論文を読んだ感想としては、YOLOv11 の貢献は方法論的なブレークスルーではなく、エンジニアリング面の微調整にあると言える。
backbone、neck、head すべてに C3k2 モジュールを導入し、パラメータ効率や推論速度の向上、低レイテンシーシナリオでの良好なパフォーマンスを実現した。しかし、これらの変更は YOLO の基本パラダイムを変えるものではなく、あくまで既存設計の最適化に過ぎない。
本来なら、この程度の向上で「次世代アーキテクチャ」とは言えない気もするが……
まあ、リリースされたものは受け入れましょう。