[24.06] MAR

再び生成の秩序を鍛え直す
Autoregressive Image Generation without Vector Quantization
本記事は nbswords の Medium に同時公開されています。
現在の自己回帰型画像生成モデルは、NLP 分野の自己回帰モデルの成功を模倣するために、画像をベクトル量子化(VQ)して複数のトークンに離散化する手法が一般的ですが、著者はこの離散空間が自己回帰型画像生成に必須ではないと考え、連続空間に基づく自己回帰画像生成モデルを提案しました。これにより、より高い精度と高速な推論時間を両立しています。
背景知識
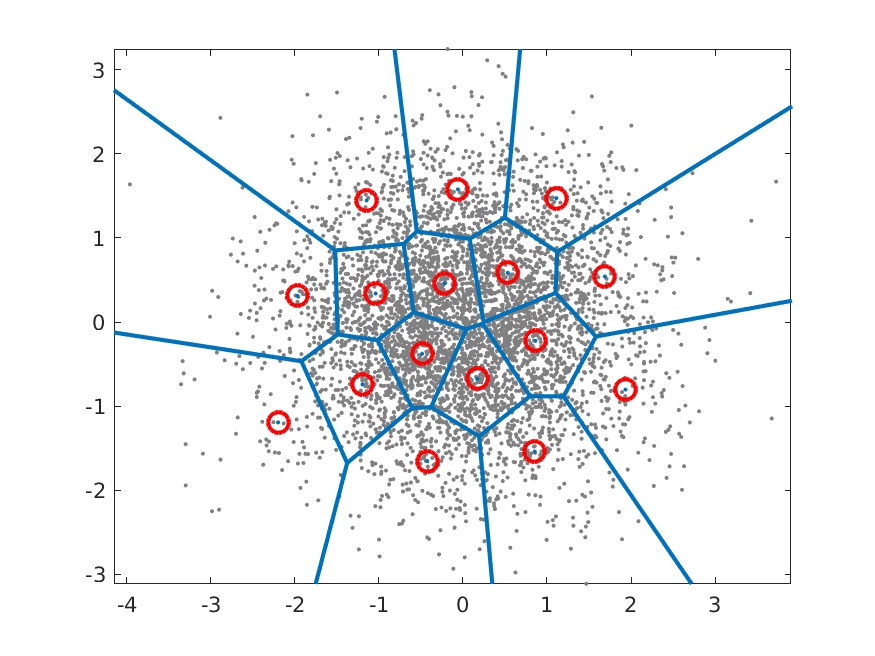
ベクトル量子化(Vector Quantization, VQ)
これは長年用いられているベクトル探索の高速化技術であり、特徴空間のベクトル(埋め込みベクトル)を複数のグループに分割し、各グループを代表するベクトルをインデックスとして扱い、すべての代表ベクトルのインデックスを含むコードブックを通じてベクトル群を管理します。
詳しい方法は Survey Of Vector Space Search や Vector quantization wiki を参照してください。
自己回帰型画像生成(Auto-regressive image generation)
初期の Visual Autoregressive Model (VAR)は、画像生成タスクを GPT のような自己回帰型テキスト生成として直接模擬し、画像の各ピクセルを一つのカテゴリとして扱い、モデルは categorical cross entropy で多クラス予測を行います。Google のImage Transformer, 2018や OpenAI のImageGPT, 2020がこの方法に該当します。
画像生成速度を上げるため、現在の自己回帰画像生成モデルでは VQ を導入した 2 段階学習が一般的です。第 1 段階で latent space 上で画像復元に用いる codebook を学習し、第 2 段階で学習した codebook に基づいて自己回帰的に画像を生成します。
-
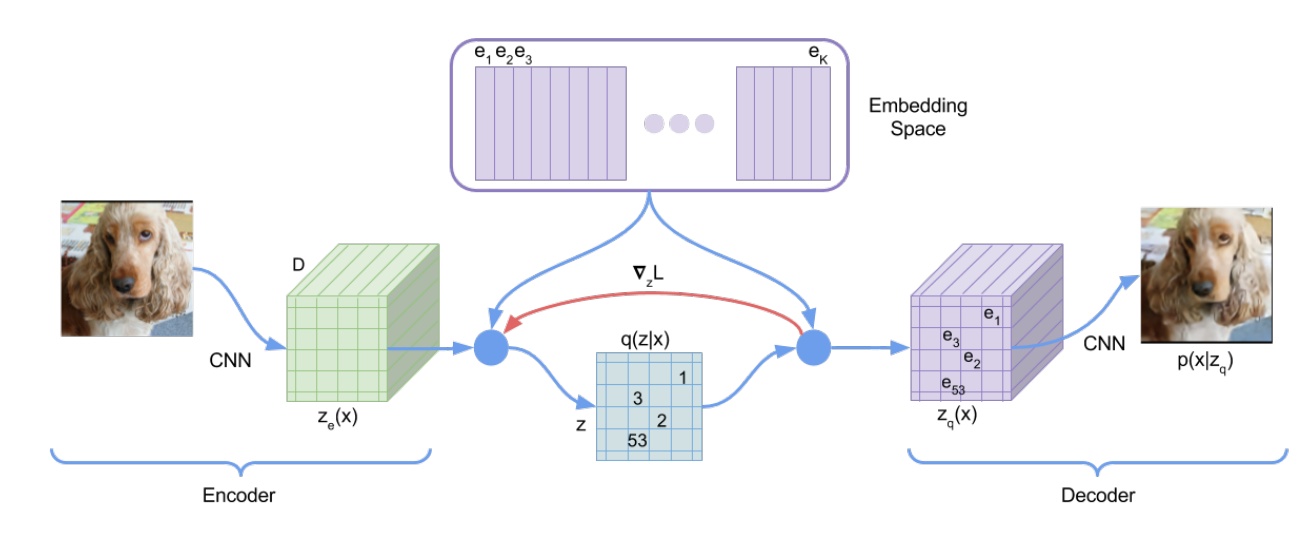
例としてVQ-VAE, 2017
- Encode 段階では CNN で画像特徴を抽出し、feature map に対して VQ を行い、各グループの代表ベクトル(紫色のベクトル、 ~ )を取得します。次に の各特徴点と代表ベクトル間の距離を計算し、最も近い代表ベクトルのインデックスで置換し を得ます。これが離散特徴です。
- Decode 段階では からマッピングされた を用いて画像を生成します。
自己回帰モデルで VQ を使い画像生成を高速化するのは魅力的ですが、欠点はないのでしょうか?
もちろんあります。1. VQ エンコーダの訓練が難しい 2. VQ によって復元画像の品質が低下する点です。
方法
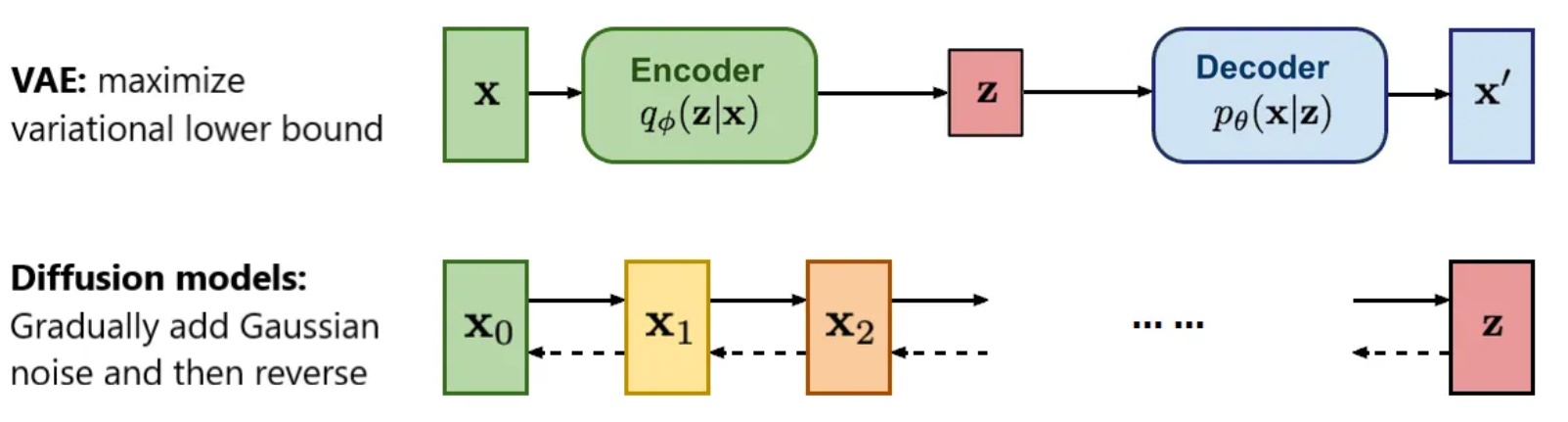
VQ を捨てて、Diffusion を採用
Diffusion モデルは画像の全ピクセルやトークンの結合確率分布を表現できるなら、なぜ各トークンの条件付き確率分布を表現できないのか?
- Diffusion は入力のプロンプトや画像を条件にノイズから画像を生成する
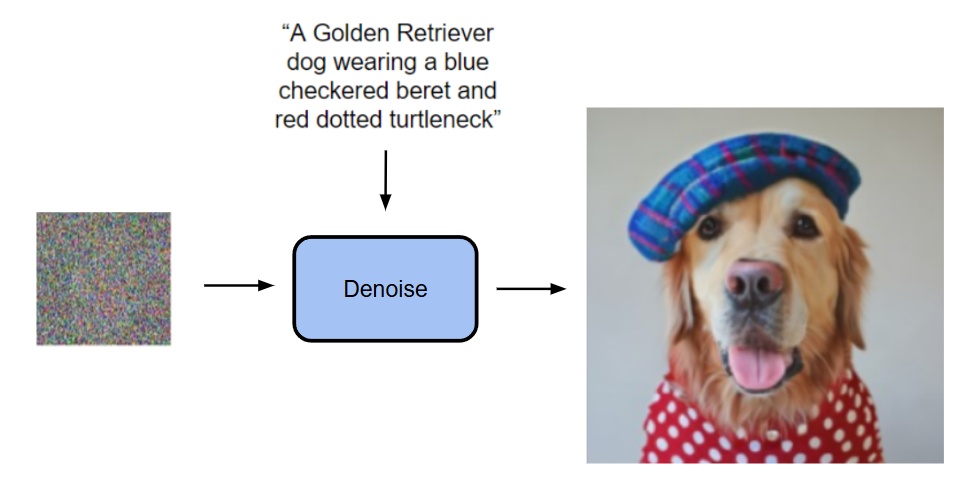
- 今回はTransformerの出力を条件としてノイズから生成(Transformerの入力については後述)
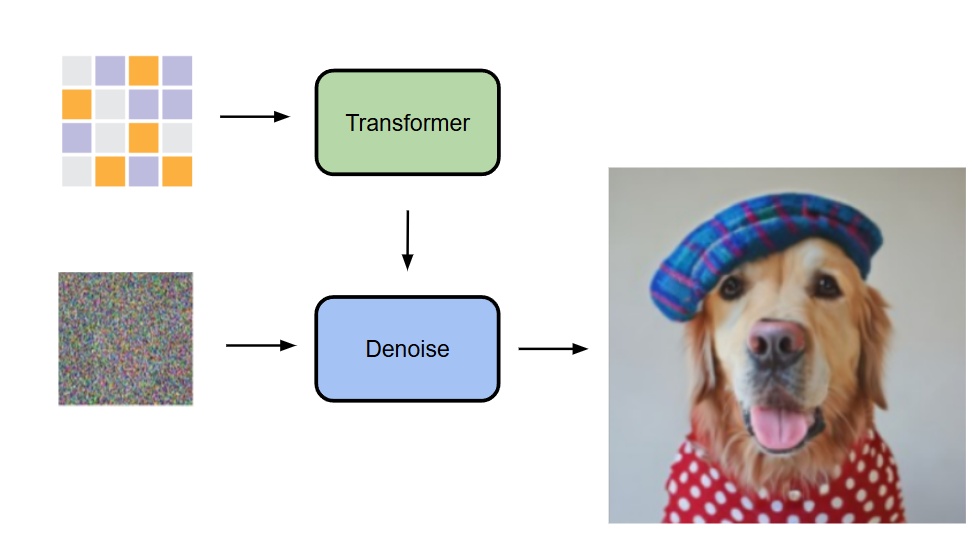
彼らの手法は、各トークンの条件付き潜在変数 z を自己回帰的に予測し、小さな MLP の Diffusion モデルでノイズ除去(denoising)を行い、出力 x の確率分布 p(x|z) を得る
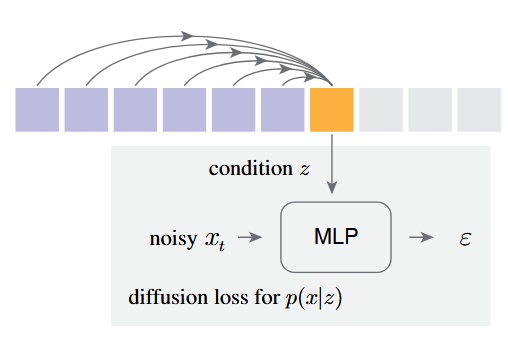
元のカテゴリカルクロスエントロピーに代えて Diffusion Loss を提案


-
は(0,1)の正規分布からサンプリングされたノイズ
-
は小さな MLP で、 は時間 と条件 をもとに入力 からノイズベクトル を推定するモデル
- はノイズスケジュールのタイムスタンプ、 は Transformer が文脈から生成した条件ベクトル
最後に、DDPM 同様に推論時には逆拡散過程(reverse diffusion process)で画像を生成( から へ)

また、Diffusion モデルの画像生成では「温度(temperature)」という超パラメータがあり、温度が高いほど生成のランダム性が大きく、低いほど少ない。今回のモデルでは温度 * を使い調整。この手法はDiffusion Models Beat GANs on Image Synthesisに由来。
これは VAE の条件生成と DDPM のノイズ除去を巧みに組み合わせ、VAE で画像特徴を圧縮し DDPM で画像を生成するという非常に洗練された手法である。
Autoregressive と Masked Generative Models の概念を融合
本モデルはMAE (Masked Autoencoders Are Scalable Vision Learners), 2021の作者である愷明氏の発想を踏襲し、MAE の考えを取り入れている。
-
主に MAE の後続研究MaskGIT, 2022とMAGE, 2022を参考に、いずれも Transformer を用いた Masked Autoregressive(MAR)である。MaskGIT は bidirectional transformer decoder で複数トークンを同時予測する点が貢献、MAGE は画像表現学習と画像合成の統合が貢献。
-
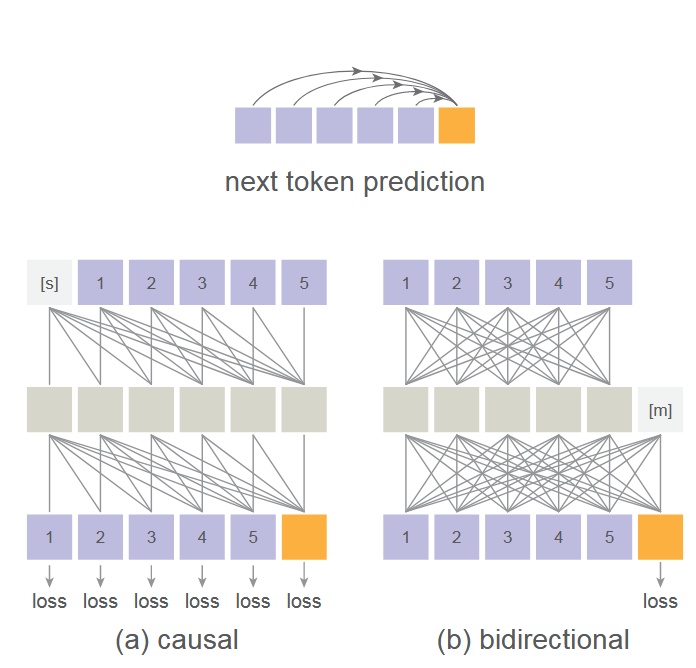
本作でも MAE の双方向注意機構を用い、マスクトークン [m]を中間層に置き全トークンが互いを参照可能にし、マスクされていないトークンのみで損失を計算する。
- これは一般的に言われる causal attention や bidirectional attention とは異なるため、理解したい場合は MAE 論文を参照。
- この設計により画像生成性能が向上する反面、Transformer の訓練・推論で kv cache を使った高速化ができなくなる。ただし複数トークンを同時予測するため速度低下は限定的。
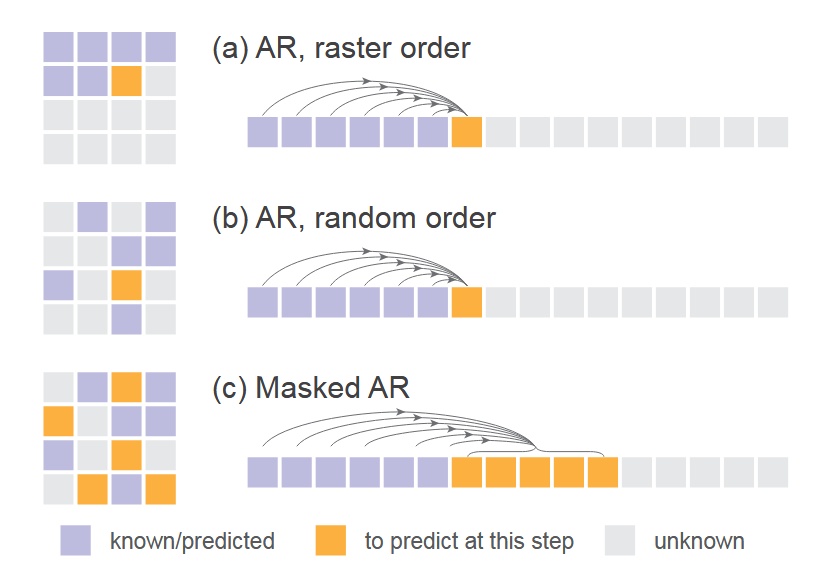
- 下図は通常の順次 AR、ランダム順序での AR(1 トークンマスク)、今回の複数トークン同時予測 AR(複数トークンマスク)の比較。ここで Transformer への入力が masked image である理由が明かされる。
実装
- Diffusion Loss:cosine 型ノイズスケジュール、訓練時は DDPM を 1000 ステップ、推論時は 100 ステップで実行
- Denoising MLP(小型 MLP):3 層 1024 チャネルブロック、各ブロックに LayerNorm、線形層、SiLU 活性化関数、Residual 接続を含む。実装上は AdaLN で Transformer の出力 z を LayerNorm 層に組み込む
- Tokenizer:LDM 公開の Tokenizer を利用、VQ-16 と KL-16 を含む。VQ-16 は VQ-GAN ベースで GAN loss と知覚損失を用い、KL-16 は KL ダイバージェンス正則化で VQ に依存しない
- Transformer:Tokenizer 処理済みのトークン列を受け取り、位置エンコードと [CLS] トークンを付加、32 層 1024 チャネルの Transformer ブロックを通す ViT を使用
- Masked autoregressive models:訓練時は [0.7, 1.0] のマスキング率で、0.7 はランダムに 70%のトークンをマスク。短すぎるシーケンスを避けるため常に 64 個の [cls] トークンでパディング。推論時はマスキング率を 1.0 から 0 へ段階的に下げ、cosine スケジュールでステップ数調整。デフォルトは 64 ステップ。
- ベースラインの Autoregressive Model:causal attention を用いた GPT モデルで、入力に [cls] を付け、kv cache と温度パラメータを利用。
実験
モデル実験設定はすべて AR/MAR-L(約 4 億パラメータ)、400 エポック、ImageNet 256×256
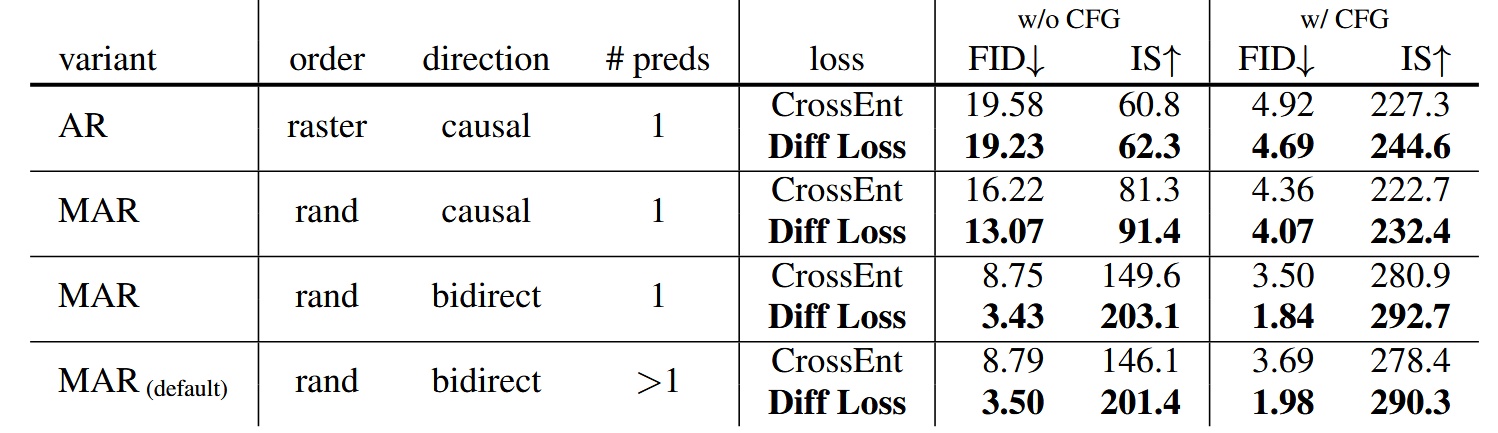
Diffusion Loss と Cross-entropy Loss の比較
すべての AR/MAR バリエーションにおいて、Diffusion Loss を使った方が性能が良い。中でも AR の改善は最小で、下に行くほど改善が大きく、MAR+bidirect+複数予測モデルの改善が最大。Diffusion Loss が MAR モデルにとって重要であることが示されている。
- Diffusion Loss は他の拡散モデルでも使われる CFG(Classifier-Free Guidance)を用いて生成性能を向上させている
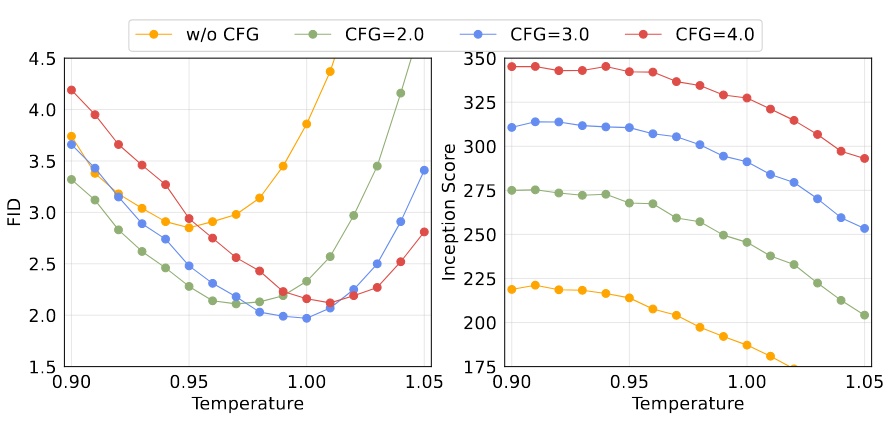
- Fréchet Inception Distance (FID) は数値が低いほど良い、Inception Score (IS) は高いほど良い。両者は生成画像の品質評価指標
トークナイザー
異なるトークナイザーを使い Diff Loss と組み合わせた効果を検証。離散空間から連続空間へ脱却したため、トークナイザーは制限されず、Diff Loss は連続・離散どちらのトークナイザーにも適用可能。
- VQ-16:VQ-VAE の VQ 前の連続潜在表現をトークン化したもの。前述の通り、VQ-16 と KL-16 は LDM 提供のもので、ImageNet で学習している(OpenImages ではない)
- Consistency Decoder:非 VQ のトークナイザーで、DALL·E 3由来
- reconstruction FID (rFID):低いほど良く、トークナイザー評価指標
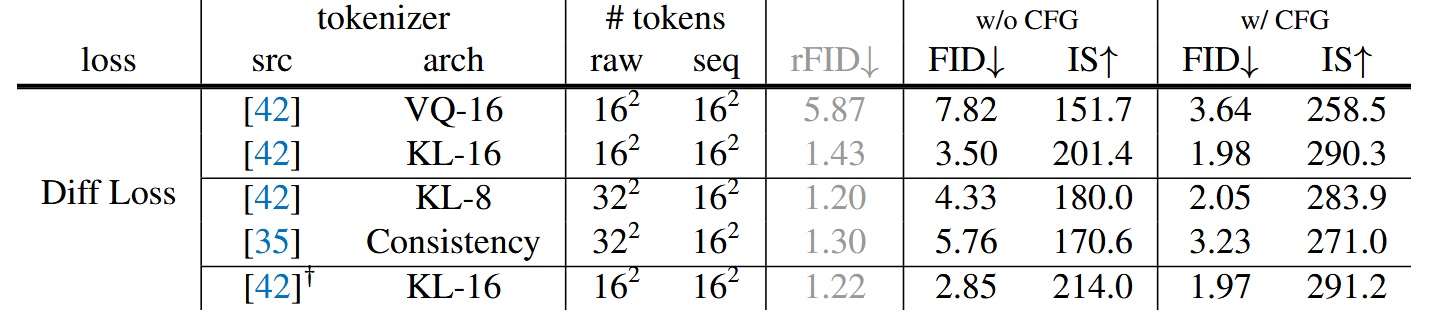
結果として、連続型トークナイザーの KL-16 は離散型 VQ-16 より良い性能を示し、Consistency Decoder のような異なるトークナイザーにも対応可能なことを示している。
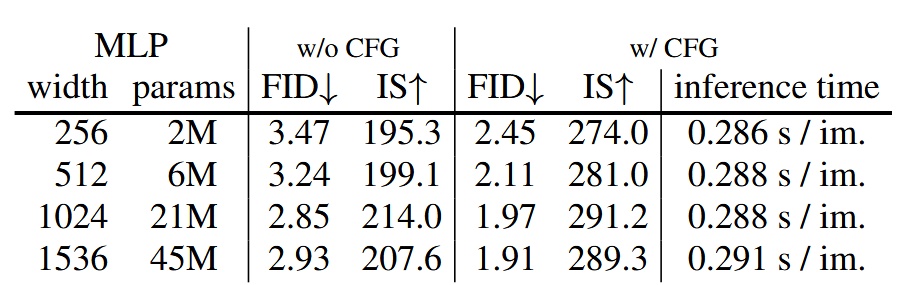
Denoising MLP
パラメータ数の異なる MLP の性能比較。幅(width)1024 が最良の性能を示す。
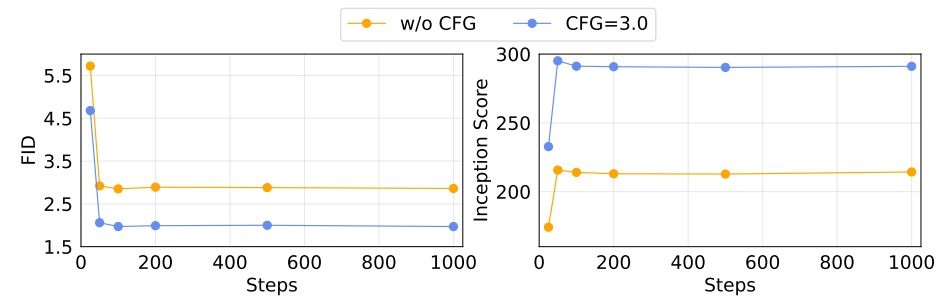
Diffusion Loss のサンプリングステップ数
Diffusion のステップ数による生成品質の影響。ステップ数 100 で十分良い性能を得られる。
Diffusion Loss の温度パラメータ
Diff Loss における温度設定も重要。
スピードと精度のトレードオフ
kv cache を使用できないため、この評価は重要。A100 を用い、バッチサイズ 256 で計測。
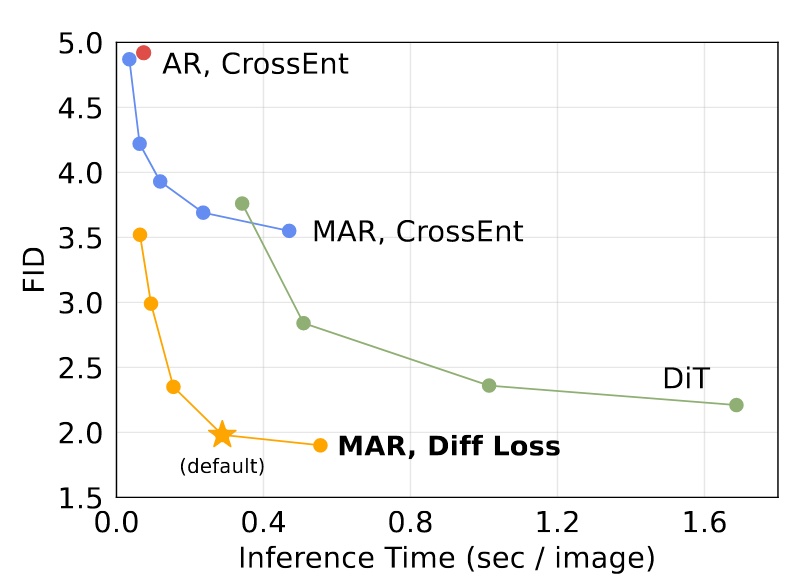
- MAR: 各点は異なる自己回帰ステップ数(8 ~ 128)
- DiT: 各点は異なる拡散ステップ数(50, 75, 150, 250)、DiT-XL を使用
- AR: kv cache を使用
kv cache なしでも推論速度は悪くないが、デフォルト設定(ステップ 64)はやや遅い。
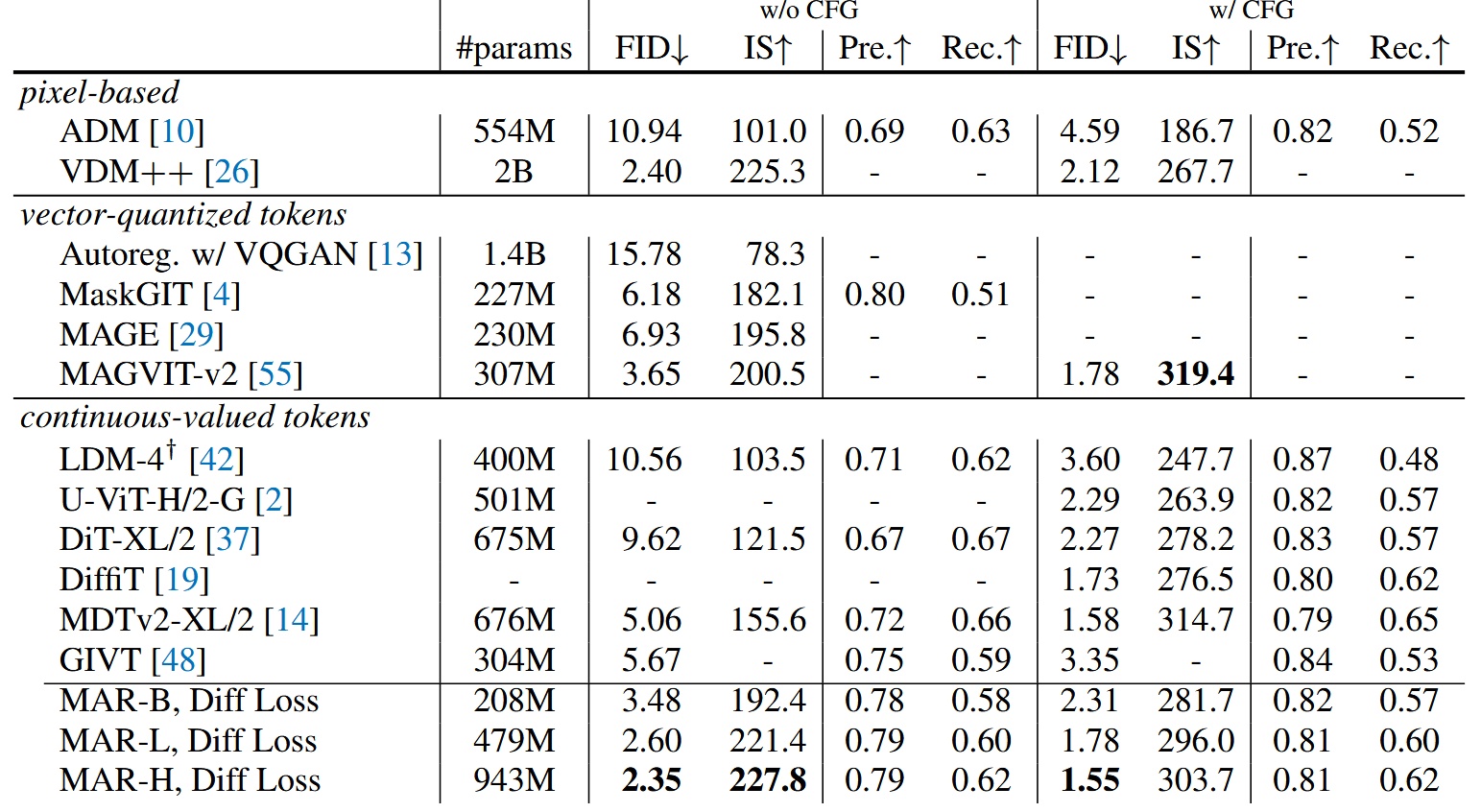
システムレベルの比較
他モデルとの比較。最大モデル MAR-H が最良の性能を示すが、MAR-L も十分良好。
結論
本研究は自己回帰画像生成の従来手法を打破し、Diffusion と MAE を融合した新たな方向性を切り拓いた。単純な DDPM を使った実証に留まるが、より優れた拡散モデルの適用でさらなる性能向上が期待される。今後の派生研究に期待したい。
最後に一部の生成画像を掲載。
